Фиг.47 Переход от начальной стартовой системы координат к связанной.
Пусть начала обеих систем совпадают.
Через центр масс летательного аппарата – начало связанной системы координат, проведём оси Ox0y0z0, параллельные осям начальной стартовой системы координат.
Ориентация летательного аппарата относительно начальной стартовой системы координат определяется 3-мя углами между связанной Ox1y1z1 и начальной стартовой системой координат Ox0y0z0, а именно:
- углом тангажа φ – углом между продольной осью летательного аппарата Ox1 и плоскостью Ox0z0. Угол тангажа определяет наклон аппарата к горизонту;
- углом рыскания ψ – между проекцией продольной оси летательного аппарата Ox1 на плоскость Ox0z0 и осью Ox0. Угол рыскания – отклонение направления полёта летательного аппарата от первоначального, ракеты – от плоскости стрельбы.
- углом крена γ – между поперечной осью летательного аппарата Oy1 и плоскостью, проходящей через оси Ox1 и Oy0.
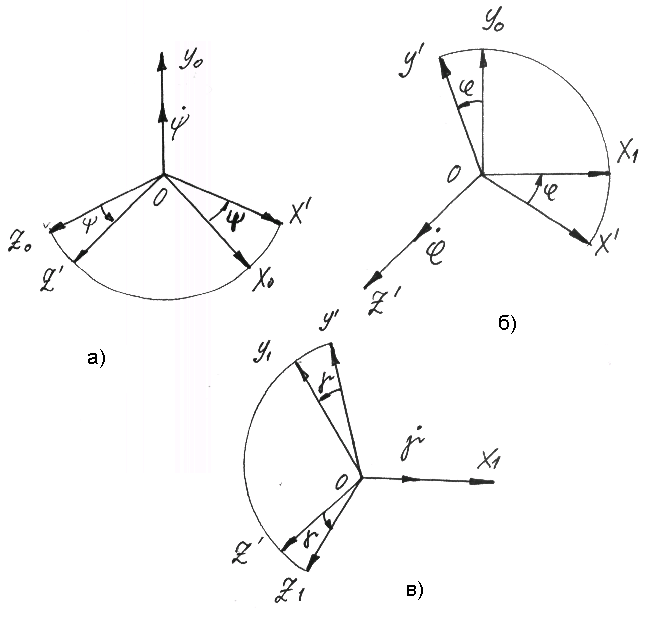
Фиг.48 Последовательные повороты на углы:
а) поворот на угол рыскания ψ;
б) поворот на угол тангажа φ;
в) поворот на угол крена γ.
Первый поворот осуществляется на угол ψ вокруг инерциальной оси Oy0 (фиг.48,а).
Второй поворот происходит вокруг промежуточной оси Oz’ на угол φ (фиг.48,б).
Третий поворот выполняется вокруг связанной оси Ox1 на угол γ (фиг.48,в).
Таким образом, в результате последовательных поворотов ан углы ψ, φ, γ, происходит переход от начальной стартовой Ox0y0z0 к связанной Ox1y1z1 системе координат. Именно эти углы обычно измеряют с помощью датчиков системы управления (СУ).
Зная углы ψ, φ, γ, в соответствии с правилами аналитической геометрии можно пересчитать составляющие силы и моменты в одной системе координат на составляющие в другой.
Направляющие косинусы углов между осями связанной и начальной стартовой систем координат приведены в таблице 1.
Табл.1
Связанная система коорд. |
Начальная стартовая система координат |
|||
Оси |
Ox0 |
Oy0 |
Oz0 |
|
Ox1 |
|
sinφ |
-cosφ |
|
Oy1 |
+ -sin φ |
cosφ = cosφ |
+ |
|
Oz1 |
φ + |
-cosφ |
γ- - sinφ |
|
Одна из задач системы управления полётом ракеты состоит в том, чтобы не допустить возникновения больших значений углов ψ (рыскания) и γ (крена), а угол φ (тангажа) изменять по определённому, заранее заданному закону.
Поскольку мы
рассматриваем полёт ракеты с исправно
работающей системой управления, будем
считать, что углы ψ и γ малы и заменять
их косинусы единицей, а синусы – углами
=>
![]() ,
,
![]() ,
,
![]() .
.
Производя такую замену и отбрасывая члены, содержащие произведения малых величин, получают упрощённые формулы, которыми будем пользоваться в дальнейшем.
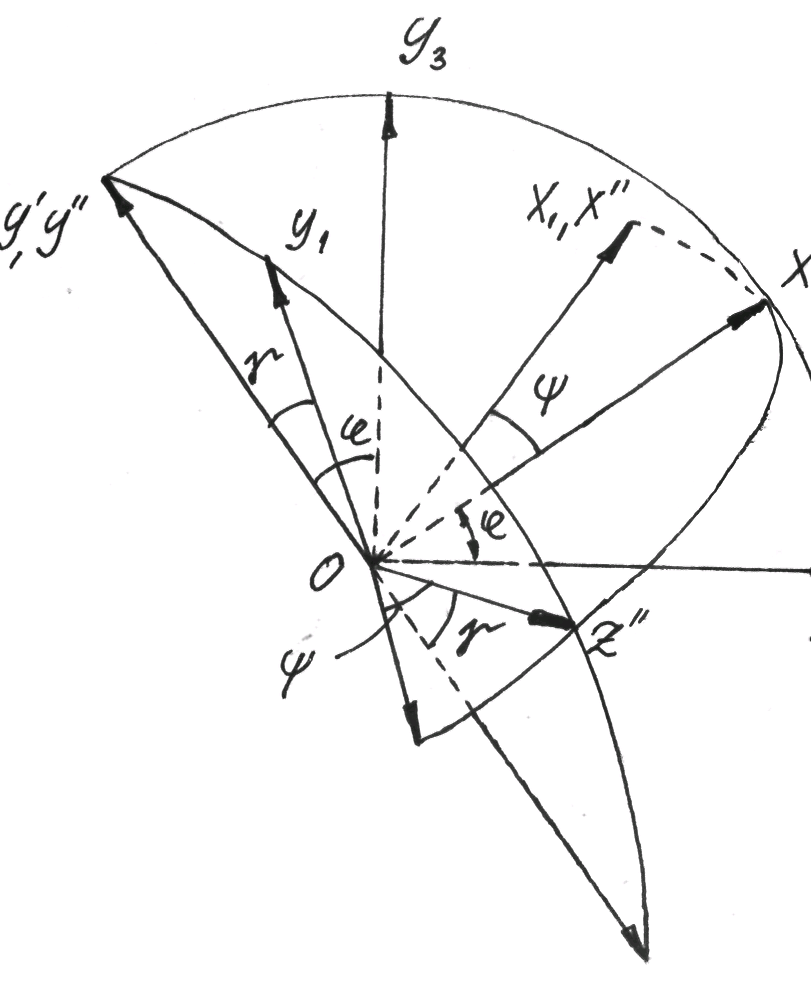
10.3.2. Направляющие косинусы между осями земной и связанной систем координат.
Начало связанной системы координат поместим в центр массы ракеты, ось Ox1 направим по продольной оси ракеты к её головной части.
На старте ракета устанавливается вертикально, поэтому в момент пуска ось Ox1 совпадает с осью Oyз земной системы координат. Ось Oz1 направлена так, чтобы она была параллельна оси Ozз, тогда ось Oy1 примет направление, противоположное направлению оси Oxз. Иначе говоря, оси связанной системы координат в момент пуска совпадают с соответствующими осями земной системы координат, если земную систему координат повернуть на угол 900 вокруг оси Ozз в направлении от оси Oxз к оси Oyз (фиг.49):