

6.2. Дифференциальные уравнения движения идеальной жидкости (уравнение Бернулли).
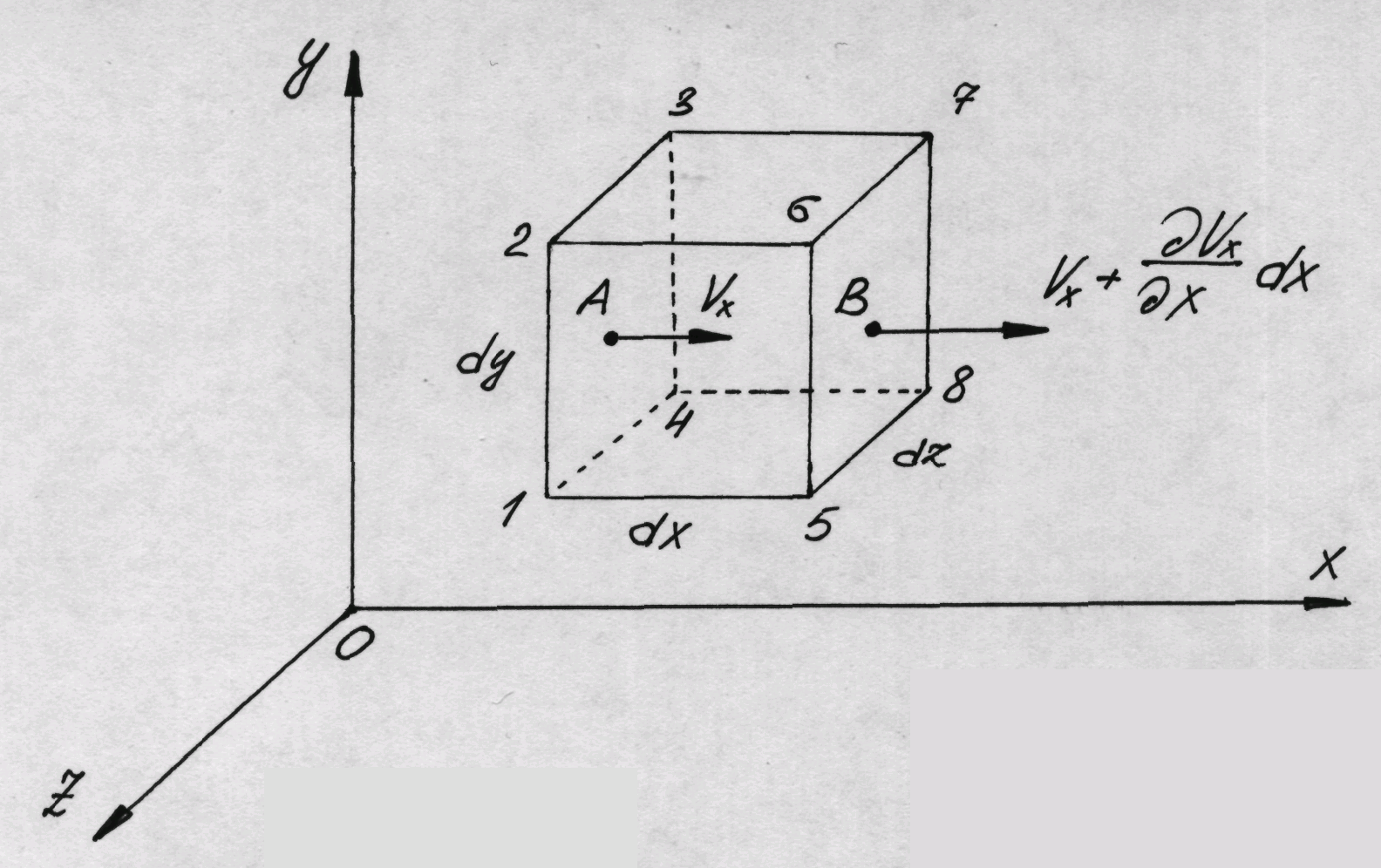
Рассмотрим движущуюся невязкую жидкость, у которой плотность ρ. Выделим в ней элементарный параллелепипед с рёбрами dx, dy, dz, параллельными к координатным осям. Составим уравнения движения выделенного элемента жидкости массой ρdxdydz в проекциях на координатные оси.
Также, как и при рассмотрении уравнения неразрывности объёма жидкости, будем считать, что на массу жидкости действует результирующая массовая сила (например, сила тяжести), составляющие которой, отнесённые к единице массы, равны x, y, z. Тогда массовые силы, действующие на выделенный объём в направлении координатных осей, будут равны этим составляющим, умноженным на массу выделенного объёма.
Кроме того, на массу жидкости в объёме параллелепипеда действуют поверхностные силы давления, окружающие жидкость, распределённые по граням параллелепипеда, направленные по внутренним нормалям к граням.
Обозначим p
давление в произвольной точке с
координатами x,
y,
z
на левой вертикальной грани. Учитывая,
что в сплошной жидкой среде давление
есть непрерывная функция координат
точек жидкости и времени p=f(x,y,z,t),
поэтому, в силу сплошности среды и
непрерывности функции давления в точке
на правой грани с координатами (x+dx,
y
,z),
давление равно
 с точностью до бесконечно малых второго
порядка.
с точностью до бесконечно малых второго
порядка.
Разность давлений
 будет одинаковой для любой пары выбранных
на этих гранях точек с одинаковыми
координатами y,
z,
при этом проекция на ось OX
результирующей силы давления равна
будет одинаковой для любой пары выбранных
на этих гранях точек с одинаковыми
координатами y,
z,
при этом проекция на ось OX
результирующей силы давления равна
Скорость движения объёма обозначим через V, а её компоненты – Vx, Vy , Vz. Тогда проекции ускорения, с которым движется объём, равны:
 , (16)
, (16)
Согласно принципу Д’Аламбера, общие уравнения движения идеальной жидкости, могут быть получены из дифференциальных уравнений равновесия той же жидкости, если к действующим силам присоединить силы инерции, которые определяются, как произведение соответствующего ускорения (ax, ay, az) на массу параллелепипеда.
Уравнения движения объёма жидкости в проекциях на координатные оси имеют вид:
 (17)
(17)
Поделив уравнения
(17) почленно на массу элемента
![]() ,
получим:
,
получим:
 – (18)
– (18)
– система дифференциальных уравнений движения идеальной жидкости (система уравнений Эйлера, 1755 г.)
Члены этих уравнений представляют собой соответствующие ускорения, а смысл каждого из уравнений заключается в следующем: полное ускорение частицы вдоль координатной оси складывается из ускорения от массовых сил и ускорения от сил давления.
Рассматривая
установившееся движение жидкости,
умножим каждое уравнение (18) на
соответствующие проекции элементарного
перемещения, равные
![]() и сложим уравнения. Имеем:
и сложим уравнения. Имеем:
![]() .
.
Учитывая, что выражение в скобках является полным дифференциалом давления, а также, что
 .
.
Получаем:
 .
.
Интегрирование этого уравнения выполним для случая установившегося движения идеальной жидкости, когда на жидкость действует лишь сила тяжести.
При направлении оси Y вертикально вверх: X=0; Y=-g; Z=0, следовательно:
 ,
следовательно:
,
следовательно:
 .
.
Для несжимаемой
жидкости
![]() ,
уравнение можно переписать в виде:
,
уравнение можно переписать в виде:
 .
.
Это уравнение означает, что приращение суммы трех членов, заключенных в скобки, при перемещении частицы жидкости вдоль линии тока (траектории) равно нулю. Следовательно, указанный трехчлен есть величина постоянная вдоль линии тока, а следовательно, и вдоль элементарной струйки, т.е.
 –
уравнение Бернулли
для струйки идеальной жидкости.
–
уравнение Бернулли
для струйки идеальной жидкости.
Для двух сечений элементарной струйки идеальной жидкости можно записать уравнение Бернулли в другой форме:
 (19)
(19)
(19) – уравнение Бернулли для элементарной струйки идеальной несжимаемой жидкости (1738 г.),
где
![]() -
геометрическая высота или геометрический
напор;
-
геометрическая высота или геометрический
напор;
 –
пьезометрическая
высота или пьезометрический напор;
–
пьезометрическая
высота или пьезометрический напор;
 –
скоростная высота
или скоростной напор.
–
скоростная высота
или скоростной напор.
Трехчлен вида
 - называется полным напором.
- называется полным напором.
Уравнение Бернулли
(19) записано для двух произвольно взятых
сечений струйки и выражает равенство
полных напоров
![]() в
этих сечениях. Так как сечения взяты
произвольно, следовательно, и для любого
другого сечения этой же струйки полный
напор будет иметь то же значение (см.
уравнение (*)):
в
этих сечениях. Так как сечения взяты
произвольно, следовательно, и для любого
другого сечения этой же струйки полный
напор будет иметь то же значение (см.
уравнение (*)):
 (вдоль
струйки).
(вдоль
струйки).
Итак, для идеальной движущейся жидкости сумма трех напоров (высот): геометрического, пьезометрического и скоростного есть величина постоянная вдоль струйки.
