

Специальная часть. Регулирование частоты вращения асинхронного двигателя. Виды регулирования.
В процессе работы многих машин и механизмов требуется регулирование скорости их движения. К ним относятся электрический транспорт, лифты, станки, электроинструмент и др. В последнее время традиционно нерегулируемые электроприводы заменяют регулируемыми в целях снижения потребления ими электрической энергии. При этом наибольший эффект достигается, если двигатель работает с переменной нагрузкой. Задача стабилизации скорости вращения решается теми же методами, что и задача ее регулирования.
Существуют три способа регулирования скорости вращения ротора асинхронных двигателей:
Регулирование частоты питающего напряжения;
Изменение числа полюсов;
Воздействие на скольжение.
Наиболее перспективным способом регулирования частоты вращения является частотный. Изменение частоты, подводимой к двигателю, осуществляется преобразователем частоты. При частотном регулировании изменяется синхронная частота вращения, а двигатель работает с небольшим скольжением. Регулирование экономичное, однако через преобразователь частоты проходит вся мощность, и габариты преобразователя частоты превышают габариты двигателя. При преобразовании частоты и напряжения сети преобразователь частоты изменяет напряжение и частоту на выходе по закону

что обеспечивает работу асинхронного двигателя при постоянном магнитном потоке.
Регулировать частоту можно и в статоре, и в роторе. В двигателях большой мощности удобнее регулировать частоту в роторе, так как при небольших пределах регулирования частоты мощность скольжения значительно меньше мощности обмотки статора. Поэтому преобразователь частоты имеет меньшие габариты. В этом случае мощность в воздушный зазор поступает со стороны статора и ротора. Такие машины получили название асинхронных двигателей двойного питания.
Несмотря на доминирующее положение, частотный привод еще не занял доминирующего положения в регулируемых приводах с асинхронными двигателями. В последнее время в связи с появлением силовых транзисторов при параллельном их соединении появилась возможность создать дешевый малогабаритный преобразователь частоты на мощность в несколько киловатт.
С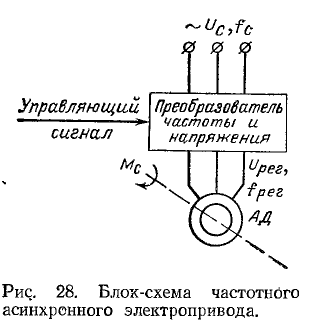 хема
частотного регулирования частоты
вращения асинхронного двигателя
представлена на рис.28:
хема
частотного регулирования частоты
вращения асинхронного двигателя
представлена на рис.28:
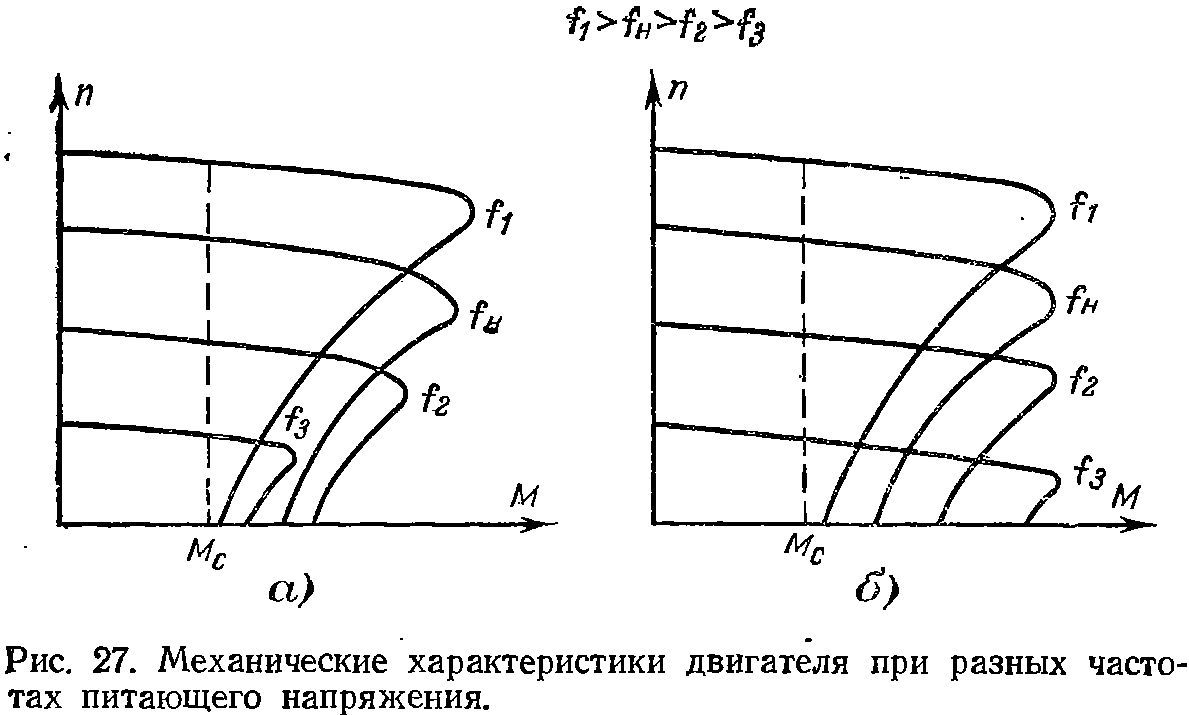
Механические характеристики асинхронного двигателя при частотном регулировании представлены на рис.27:
Изменение числа полюсов:
Пути реализации данного способа следующие:
Размещение в пазах статора нескольких обмоток с различным числом полюсов. Напряжение питания в этом случае переключается с одной обмотки на другую в зависимости от требуемой скорости. Модификации таких многоскоростных асинхронных двигателей на две, три и даже четыре скорости используются, например, в электроприводах лифтов.
Изменение схемы обмотки статора путем переключения ее катушек.
Использование так называемой полюсно-амплитудной модуляции, изменяющей схему обмотки. В этом случае в результате наложения полей катушек или катушечных групп изменяется число полюсов результирующего магнитного поля в воздушном зазоре.
Недостатками данного способа являются:
Невозможность плавного регулирования скорости;
Более высокие габаритные размеры, масса и стоимость многоскоростных двигателей по сравнению с односкоростными нерегулируемыми.
Регулирование изменением напряжения:
Момент асинхронного двигателя пропорционален квадрату напряжения на зажимах обмотки статора. Если каким-нибудь регулятором уменьшать напряжение, максимальный момент резко снижается, а критическое скольжение остается неизменным. При этом рабочее скольжение и скорость вращения ротора будут также меняться. Причем у обычного нерегулируемого асинхронного двигателя диапазон изменения скольжения невелик и для его расширения нужно повысить Sкр, т.е. увеличить активное сопротивление обмотки ротора.
Работа асинхронного двигателя при повышенном скольжении неэкономична, так как в этом случае велики потери в обмотке ротора. Поэтому таким способом регулируют скорость вращения ротора в малом диапазоне и только в двигателях небольшой мощности.
Список литературы:
В.Я. Беспалов, Н.Ф. Котеленец, «Электрические машины»,М.: Академия, 2006 г.
И.П. Копылов «Проектирование электрических машин», М.: Энергоатомиздат , 1993г. в 2-х томах.
И.П. Копылов «Электрические машины», М.: Высшая школа, 2000 г.
Москва 2011 г.