X1, x2, x3, x4, x5 – электрические разъемы
SA1 – переключатель управления движениями, используется для направления управляющего напряжения на соответствующие кнопки пульта ручного управления. Имеет три положения, верхнее, нижнее и нейтральное. При верхнем положении переключателя SA1 движение манипулятора осуществляется: рука и платформа движутся только вперед, поворот осуществляется только вправо, схват движется только вниз. При нижнем положении переключателя SA1 движение манипулятора осуществляется: рука и платформа движутся только назад, поворот осуществляется только влево, схват движется только вверх.
SA2 – переключатель скорости движения руки манипулятора
SA3 – переключатель скорости движения схвата манипулятора
SB1 – кнопка управления черным схватом (схват заготовки)
SB2 – кнопка управления желтым схватом (схват детали)
SB3, SB4 – поворот схватов
SB5 – при нажатии на нее движение руки манипулятора осуществляется либо вперед либо назад
SB6 – при нажатии на нее схваты манипулятора движутся либо вверх либо вниз
SB7 – при нажатии на нее осуществляется поворот руки манипулятора
SB8 – при нажатии на нее движение платформы манипулятора осуществляется либо вперед либо назад
Порядок работы
Дня начала работы с манипулятором нужно проверить правильность соединения разъемов пульта ручного управления к блоку управления, блока управления к манипулятору. Убедиться в отсутствии повреждения соединительных кабелей. Проверить подключения магистрали жатого воздуха.
Установить механизмы манипулятора в исходное положение: корпус механизма горизонтального перемещения должен находиться в правом крайнем положении, механизм горизонтального перемещения должен находиться под углом 90 градусов к направлению движения корпуса, ползун механизма горизонтального перемещения должен находиться в крайнем втянутом положении, штанга механизма подъема должна находиться в крайнем верхнем положении.
Подать из магистрали сжатый воздух с избыточным давлением 3.5 - 5.98 *105 Па. При этом на пульте ручного управления кнопки SB1 и SB2 (заготовка, деталь) должны быть отжаты. Тумблеры SA2, SA3, SA4 в верхнем положении, переключатель SA1 (верхнее – нижнее положения) должен находиться в нейтральном положении. Автоматический выключатель на блоке управления должен быть отключен.
Подать питание переменного тока, напряжением 220В на блок управления, включить автоматический выключатель, при этом должна загореться лампа на блоке управления и нажать на кнопку РАБОТА. Включить тумблер на ячейке стабилизации блока управления, должны загореться светодиоды СЕТЬ и +5В.
Проверка пульта ручного управления манипулятором.
На пульте ручного управления нажать кнопку SB1 – при этом кулачки черного схвата сожмутся. Нажать кнопку SB2 – при этом кулачки желтого схвата сожмутся. При нажатии кнопок SB3 и SB4 черный и желтый схваты меняются местами.
На пульте ручного управления переключатель SA1 поставить в положение ВЕРХ. Нажать кнопку SB5 – движение руки. Механизм горизонтального перемещения руки манипулятора должен начаться двигаться вперед. Переключить тумблер SA4 и рука манипулятора начнет двигаться с меньшей скоростью. Нажать кнопку SB6 – движение схватов манипулятора вниз. Механизм вертикального перемещения руки начнет свое движение вниз. Переключить тумблер SA3 и схваты манипулятора начнут двигаться с меньшей скоростью. Нажать кнопку SB7 - рука манипулятора начнет поворачиваться вправо. Нажать кнопку SB8 – при этом платформа манипулятора начнет движение вперед. Переключить тумблер SA4 и платформа начнет двигаться с меньшей скоростью.
На пульте ручного управления переключатель SA1 поставить в положение НИЗ. Нажать кнопку SB5 – движение руки. Механизм горизонтального перемещения руки манипулятора должен начаться двигаться назад. Переключить тумблер SA4 и рука манипулятора начнет двигаться с меньшей скоростью. Нажать кнопку SB6 – движение схватов манипулятора вверх. Механизм вертикального перемещения руки начнет свое движение вниз. Переключить тумблер SA3 и схваты манипулятора начнут двигаться с меньшей скоростью. Нажать кнопку SB7 - рука манипулятора начнет поворачиваться влево. Нажать кнопку SB8 – при этом платформа манипулятора начнет движение назад. Переключить тумблер SA4 и платформа начнет двигаться с меньшей скоростью.
Если после проверки все работает и не происходит сбоев, значит можно приступать к дальнейшей работе с манипулятором.
Контрольные вопросы:
Зарисовать механизм поворота платформы
Как осуществляется поворот платформы?
Как происходит горизонтальное перемещение платформы?
Как осуществляется схват груза?
Как осуществляется поворот груза?
Зарисовать механизм подъема груза?
Зарисовать механизм горизонтального перемещения руки
Зарисовать механизм горизонтального перемещения платформы
Как осуществляется подъем груза?
Порядок включения манипулятора?
Лабораторная работа №3
(стенд №13)
ЦЕЛЬ РАБОТЫ:
Изучить принцип работы и характеристики двухзонного регулирования частоты вращения двигателя постоянного тока.
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Регулирование частоты вращения путем изменения потока двигателя обладает небольшим диапазоном (практически не больше 1:4). Для расширения диапазона применяется двухзонное регулирование, которое осуществляется в первой зоне напряжением на якоре двигателя (регулирование вниз от номинальной), во 2-ой - потоком двигателя (регулирование вверх от номинальной частоты вращения).
Обычно применяются независимое и зависимое управление потоком. При независимом управлении потоком двигателя регулирование частоты вращения двигателя производится независимо от величины напряжения якоря двигателя, а при зависимом управлении потока двигателя регулирования частоты вращения двигателя изменяется в соответствии с величиной напряжения на якоре двигателя.
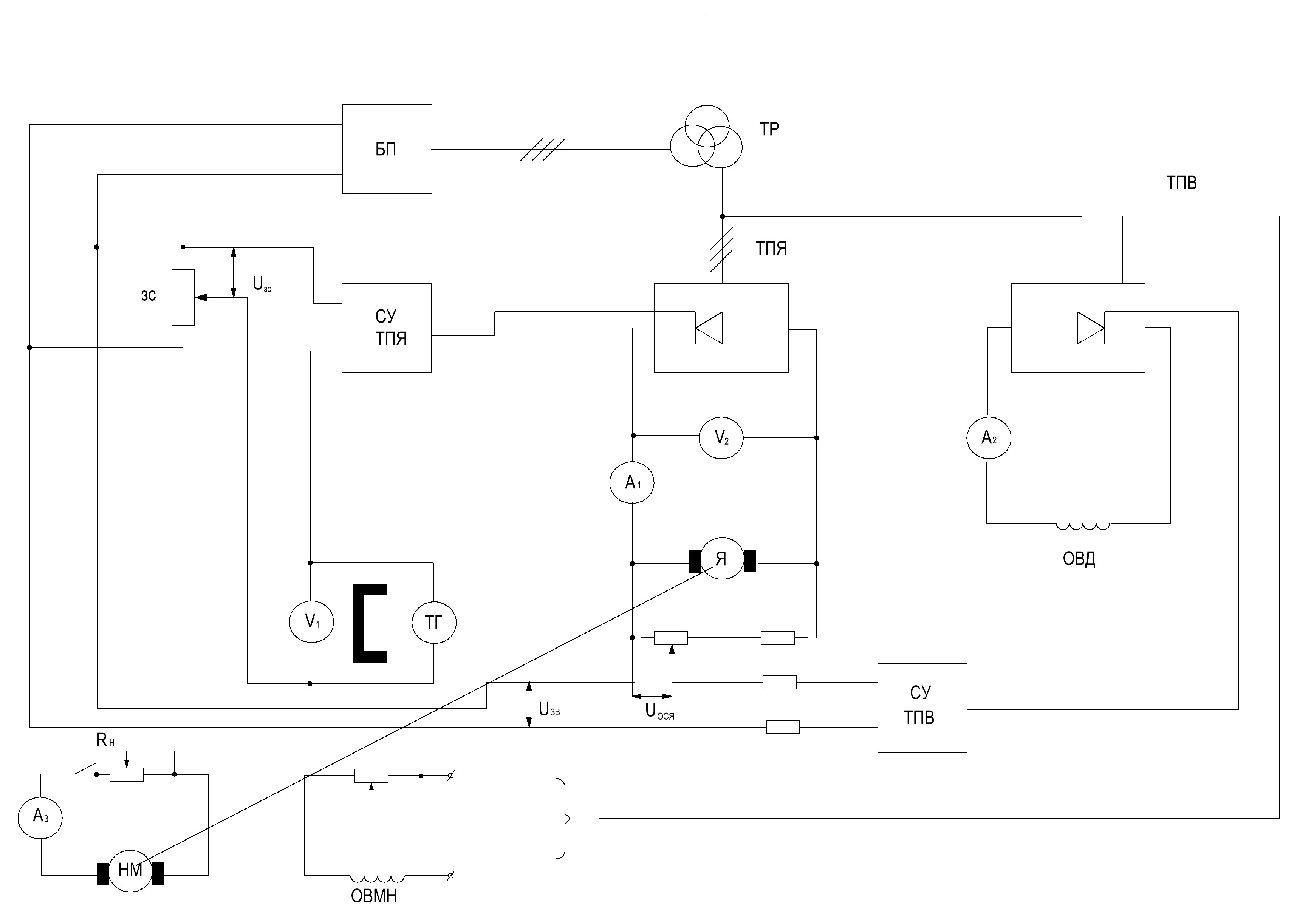
На рис.1 представлена система зависимого управления поля двигателем с помощью тиристорного преобразователя. В такой системе якорь двигателя Я и обмотка возбуждения ОВД питающая от отдельных управляемых выпрямителей; якорь от ТПЯ, а обмотка возбуждения - от ТПВ. На систему управления возбуждением СУТПВ подается два напряжения: задающее Uзв и отрицательной обратной связи по напряжению якоря Uося, следовательно, работа ТПВ зависит от напряжения ТПЯ. Обычно система строится так, что при напряжении двигателя в пределах 0 - 0,95% от номинального ТПВ открыт полностью и ток возбуждения равен номинальному. При напряжениях, превышающих 95% от номинального, ТПВ начинает запираться и поле двигателя ослабляется.
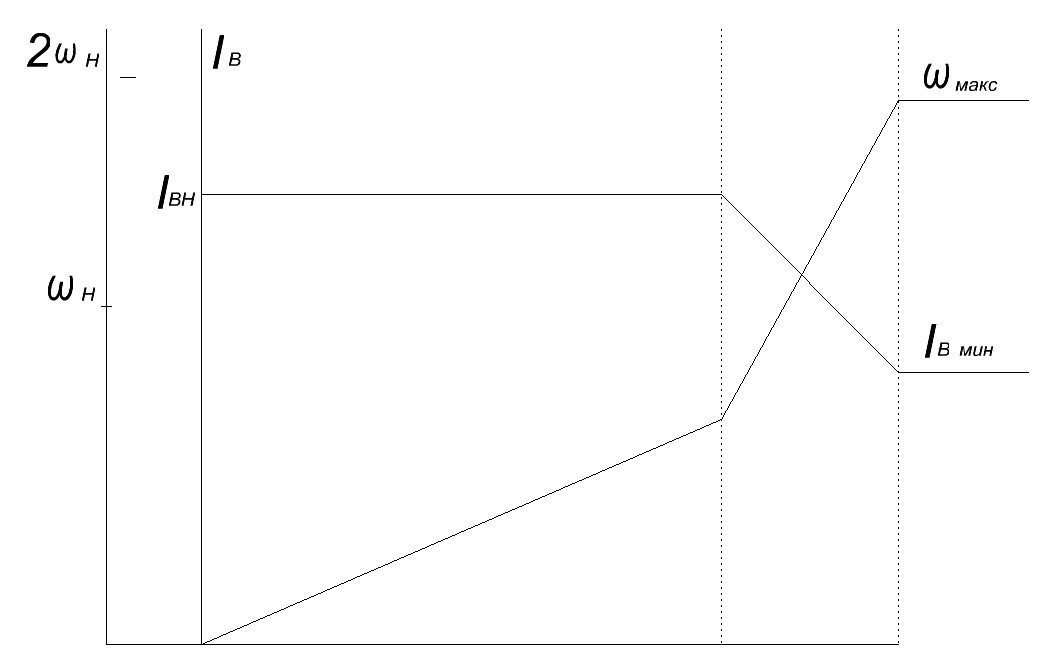
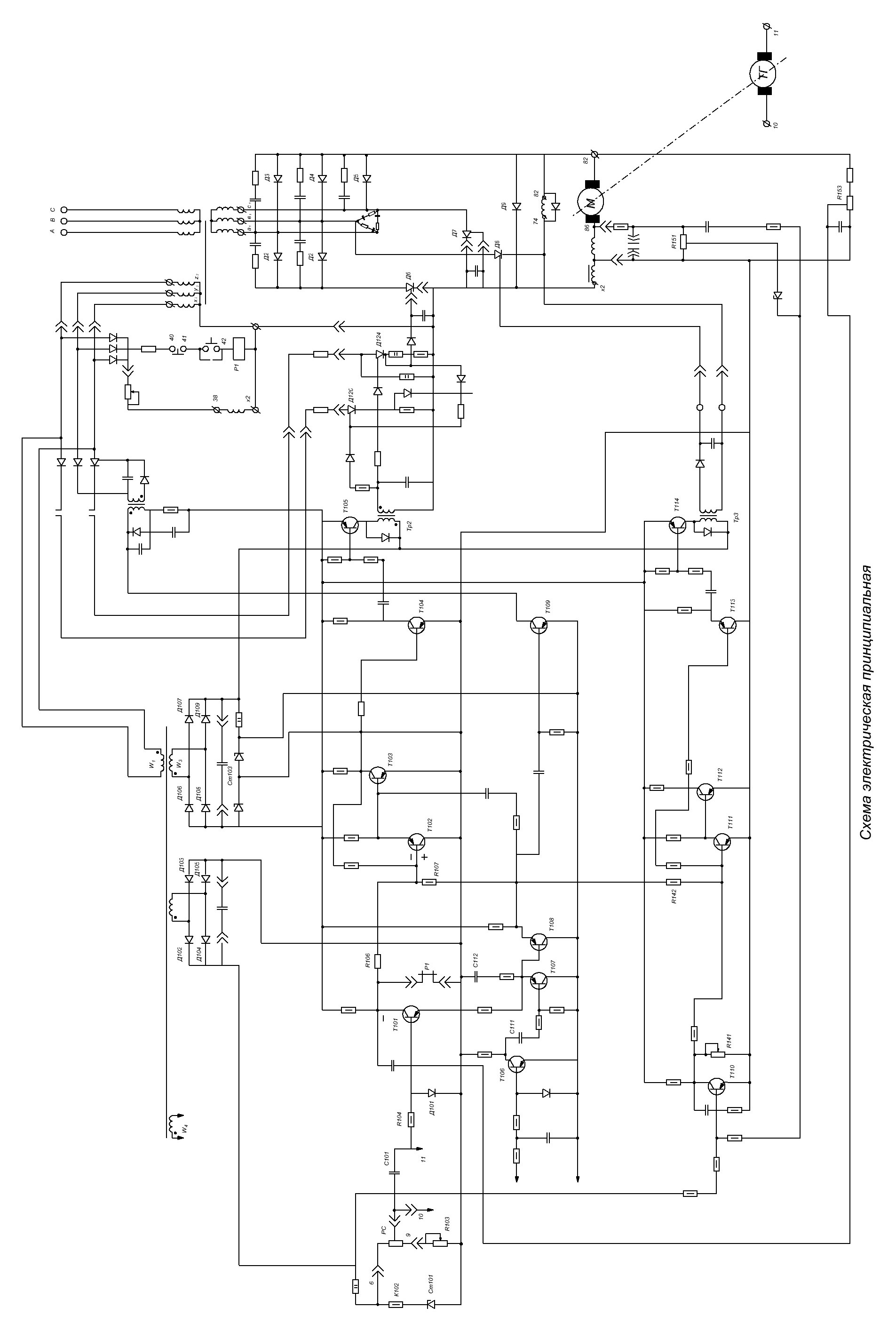
На рис. 2 предоставлены графики примерного изменения частоты вращения и тока возбуждения двигателя в функции напряжения якоря На рис. 3 дана принципиальная электрическая схема тиристорного привода типа ПКВТ для двухфазного регулирования частоты вращения (привод комплектный приводно-тиристорный).
Тиристорный преобразователь цепи якоря ТПЯ выполнен по асимметричной трехфазной мостовой схеме на 5-и кремниевых вентилях Д1-Д5 и двух тиристорах Д6 и Д7 с шунтирующим диодом Д9. Сигнал постоянного напряжения от задатчика частоты вращения (PC) алгебраически суммируется с напряжением тахогенератора и поступает на вход промежуточного усилителя Т101. Усиленный сигнал отрицательной полярности, снимаемый с коллектора этого транзистора, через резистор R106 подается на базу транзистора Т102. На базу этого же транзистора через резистор R107 подается опорное напряжение положительной полярности. Состояние транзистора Т102 зависит от соотношения этих напряжений. В момент открытия транзистора Т102 формируется управляющий импульс, который усиливается с помощью тиристоров Д120, Д124. Анодное питание этих маломощных тиристоров подобрано так, что отпирающее напряжение при углах регулирования, близких к 300 - 350 электрических градусов подается только на тиристор Д7, а при углах регулирования 0 – 300 электрических градусов подается на оба силовых тиристора Д6, Д7.
Величина задающего напряжения определяет величину угла регулирования тиристоров Д6, Д7, напряжение на якоре двигателя и его частоту вращения.
При увеличении частоты вращения двигателя свыше номинальной вступает в работу регулятор ЭДС, который стремится поддержать неизмененной ЭДС двигателя.
Схема электропривода ПКВТ состоит: из узла формирования опорного напряжения, из двух идентичных каналов формирования импульсов по вертикальному принципу, из распределителя импульсов и силовой схемы.
Формирователь опорного напряжения выполнен на трех транзисторах Т106, Т107, Т108. Транзистор Т106 переключается синхронно с сетью, и в момент закрытия транзистора Т106 емкость C111 перезаряжается через базо-эмиттерный переход транзистора 1107, который, включаясь на короткое время, заряжает конденсатор С112 (диаграмма токов, напряжений приведены на рис.4 для двух значений напряжения усилителя). После выключения транзистора Т107 емкость разряжается на базо-эмиттерный переход повторителя Т108.
Время разряда более 330 эл. град.
Эмиттерный повторитель Т108 служит для согласования нагрузок. С эмиттерного повторителя опорное напряжение снимается на оба канала формирования импульсов (якоря и возбуждения) через резисторы R107, R142.
Каждый формирователь импульсов выполнен на четырех транзисторах Т102 + Т105, Т111 - Т114.
Выходные импульсы снимаются с обмоток трансформаторов Тр2, ТрЗ.
Усиление и распределения отпирающих напряжений тиристоров Д6 и Д7 осуществляется с помощью тиристоров Д120. Д124.
ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
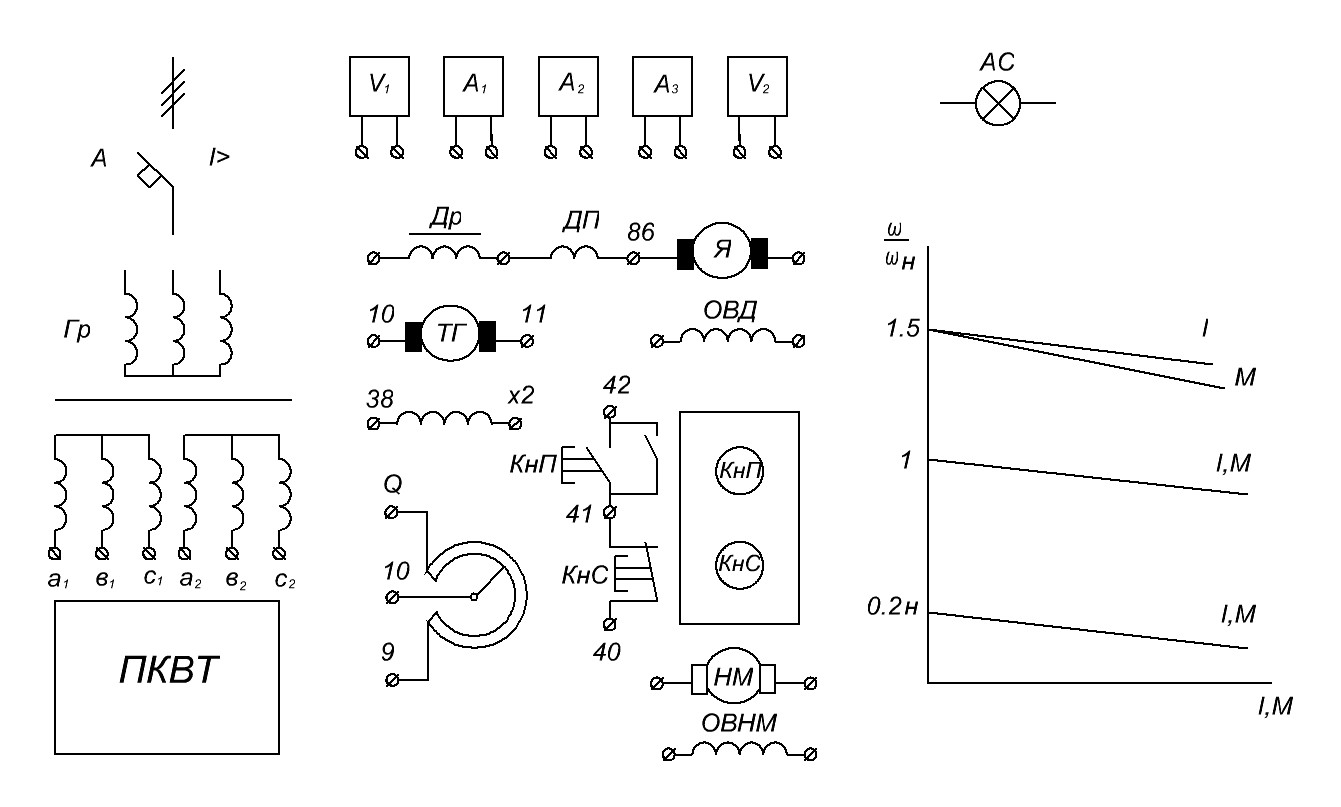
На лабораторном стенде (рис.5) установлен преобразователь ПКВТ и необходимые для проведении исследования приборы. На панель стенда выведены клеммы якоря и обмотки возбуждения двигателя, якоря и обмотки возбуждения тахогенератора, якоря и обмотки возбуждения нагрузочной машины, трансформатора питания.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
Пользуясь рисунком 1 и принципиальной схемой рис. 3 необходимо смонтировать электропривод, произвести пробный пуск, убедиться в правильной работе системы регулирования частоты вращения, а затем приступить к выполнению исследования.
Для питания обмотки возбуждения нагрузочной машины используется напряжение неуправляемой части тиристорного преобразователя,
Перед включением привода схему соединений должен проверить преподаватель!
Данные измерения и расчетов заносят в таблицу 1,2,3,4,5.
а)Снятие зависимости ω=f(Uя) и Iв = q(Uя)
Табл. 1
Uя,В |
|
ω, 1/с |
|
Iв,А |
|
б)Снятие зависимости Рхх=f(ω)
Табл. 2
ω, 1/с |
|
Uя, В |
|
Iя, А |
|
Рхх=UяIя |
|
в)Снятие статических скоростных и механических характеристик.
Табл .З
ω r=0.2ωн |
|
Iя, A |
|
Uя, В |
|
Рэм, Вт |
|
Mэм, Нм |
|
Табл. 4
ω0=ωн |
|
Iя,А |
|
Uя,В |
|
Рэм, Вт |
|
Mэм,Нм |
|
Табл.5
ω0=1.5ωн |
|
Iя,А |
|
Uя,В |
|
Рэм, Вт |
|
Mэм,Нм |
|
Примечание:
Mэм= Рэм/ ω=(Pc-Pxx)/ ω=(UяIя- Pxx)/ ω, Нм; Р[Bт]; ω =[1/c];