

4.2 Контактные реле
Контакты реле относятся к подвижным контактным соединениям и представляют собой конструктивные узлы в виде двух (или нескольких) проводников, изолированных друг от друга и способных замыкаться при сближении контактирующих тел или размыкаться при их расхождении.
Контакты реле в значительной степени определяют надежность их работы.
Для нормальной работы реле контакты должны удовлетворять следующим основным требованиям:
обеспечивать надежное электрическое соединение;
иметь малое и стабильное переходное сопротивление;
не иметь вибраций при включении и в рабочем состоянии;
обладать высокой электро- и теплопроводностью;
стойкость против внешних воздействий (температуры, влажности и др.);
обладать износостойкостью;
обеспечивать требуемую мощность управления.
Контакты реле, предназначенные для работы при небольших токах, выполняются из драгоценных металлов (серебра, платины, золота, палладия) и их сплавов, а при сравнительно больших токах – из вольфрама и его сплавов с молибденом, платино-иридия и других металлов. Мощные реле, размыкающие цепи с большими токами, имеют контакты из графита и металлокерамики.
Для анализа работы релейных схем часто используют временные диаграммы (рис.18).

Рис. 198 Временные диаграммы релейных схем
Общая временная диаграмма приведена на рис.18а. На диаграмме в масштабе отложены время срабатывания –tСР, время отпускания – tОТП и рабочее время – tР.
Времена срабатывания и отпускания принято обозначать наклонными отрезками прямых. Кроме общей временной диаграммы, применяются диаграммы коммутирующих органов. При срабатывании реле коммутирующий орган меняет свое состояние с нулевого на единичное (рис. 18б) или с единичного на нулевое (рис. 18в).
При наличии в схеме большого числа элементов совместное рассмотрение их временных диаграмм облегчает анализ работы схемы в целом.
4.3 Электрические контактные реле.
Электрические контактные реле представляют собой устройство, в которых входная электрическая величина (ток, напряжение, частота) преобразуется в механическое перемещение подвижной части, связанной с контактной системой (При подаче на вход сигнала определенной величины обеспечивается замыкание или размыкание контактов).
Электрические контактные реле разделяются на электромагнитные, магнитоэлектрические, электродинамические, индукционные, пьезоэлектрические, электростатические и др.
Из всех перечисленных типов реле, наиболее часто используются электромагнитные.
Электромагнитные реле. Принцип действия: взаимодействие ферромагнитного якоря с магнитным полем обмотки, обтекаемой током. Воспринимающим органом реле является обмотка с магнитопроводом, коммутирующим органом – контакты; промежуточный орган образуется частью и пружинами (возвратными, контактными).
По роду входного тока различают реле постоянного и переменного тока.
Реле постоянного тока в свою очередь делятся на нейтральные реле, работа которых не зависит от входного сигнала, и поляризованные реле, работа которых зависит от полярности сигнала.
В зависимости от расположения якоря и характера взаимодействия на него магнитного потока бывают электромагнитного реле с внешним притягивающим якорем (клапанного типа), с втягивающимся якорем (прямоходовые), с внешним поперечно движущимся (поворотным) якорем (поворотного типа).
По числу обмоток различают однообмоточные и многообмоточные реле; по числу контактных групп – малоконтактные и многоконтактные реле.
Преимущества электромагнитных реле: высокие коммутационные свойства (высокое сопротивление разомкнутых контактов и низкое - замкнутых), сравнительно высокой надежности, возможностью одновременного переключения большого числа цепей, многообразию конструктивных форм и другим свойствам.
Электромагнитные реле постоянного тока (нейтральные реле). Такие реле выполняются с внешним притягивающим якорем (рис 19) и с втягивающимся якорем (рис 20). Первые имеют наибольшее применение.
Реле с внешним притягивающимся якорем (клапанного типа) представляют собой электромагнитный механизм и ряд контактных групп, установленных на одном основании 5.
Магнитопровод состоит из ярма (корпуса) 11, сердечника 8 и якоря 6, выполненных из магнитной стали. На сердечнике помещается каркас 9 с одной или несколькими обмотками 10. При протекании по обмотке электрического тока якорь притягивается к сердечнику. Движение якоря через непроводящий штифт 3 передается на одну из контактных пружин 4, в результате чего происходит замыкание подвижного 1 и неподвижного 2 контактов. Чтобы обеспечить возврат якоря в исходное положение после обесточивания обмоток (т.е. предупредить замыкание якоря), на нем предусматривается штифт 7. В исходном положении якорь удерживается контактными пружинами. Иногда для этого дополнительно используют специальные (возвратные пружины).
В реле с втягивающимся якорем (рис 27) магнитопровод состоит из ярма 7, неподвижного сердечника 8 и якоря 3. Внутри ярма помещается катушка 5 с обмоткой 6. В исходном положении якорь удерживается пружиной 4. При срабатывании реле происходит замыкание подвижного 1 и неподвижного 2 контактов.
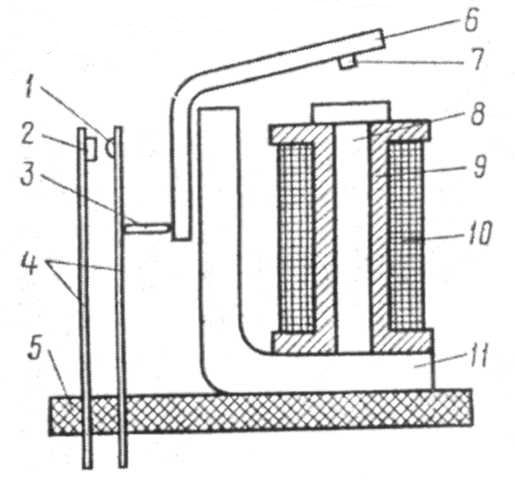
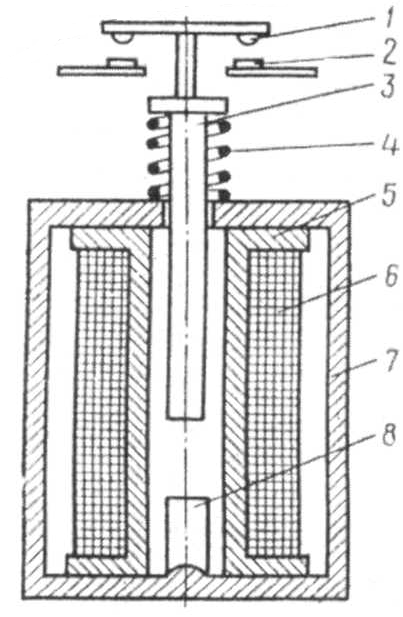
Рис. 19 Реле клапанного типа Рис. 200 Электромагнитное реле с втягивающимся якорем
Электромагнитные поляризованные реле. В системах измерений, контроля и испытаний часто бывает необходимо реагирование элемента не только на величину, но и на полярность входного сигнала.
Устройство таких реле основано на взаимодействия двух независимых друг от друга магнитных потоков: поляризующего, создаваемого обычно постоянным магнитном в цепи магнитопровода, и рабочего, создаваемого обмотками реле при протекании по ним управляющего тока с величиной и направлением, зависящим от схемы, в которую включены эти обмотки.
Существует много конструктивных разновидностей поляризованных реле. По конструктивной схеме магнитной цепи различают реле с последовательной, параллельной (дифференциальной) и с мостовой магнитной цепью.
По числу обмоток управления реле бывают однообмоточные и многообмоточные.
По числу устройств положений якоря реле делятся на двухпозиционные и трехпозиционные.
В поляризованных реле используют дифференциальные и мостовые схемы магнитных цепей (рис 21 и 22).
В поляризованном реле с дифференциальной схемой цепи (рис 21) по магнитопроводу протекают потоки:
рабочий поток – ФР от обмоток, обтекаемых электрическим током;
поляризующий поток – ФО от постоянного магнита.
Якорь перемещается в зазоре δ в зависимости от суммарного действия этих потоков. Предполагается, что якорь занимает среднее нейтральное положение между полюсами сердечника, а ток в обмотках отсутствует. В этом случае в магнитопроводе имеется лишь поток ФО, который проходя через якорь, делится на Ф1 и Ф2. Если магнитная система симметрична, то намагничивающие силы, создаваемые этим потоком в обоих воздушных зазорах, равны, и результирующая сила, действующая на якорь, равна нулю. Однако равновесие якоря в среднем положении, если он закреплен свободно, неустойчиво. При незначительном смещении якоря в сторону одного из полюсов сила притяжения к этому полюсу увеличивается, а к другому – уменьшается, происходит замыкание соответствующего контакта. После включения обмоток появляется рабочий поток Фр, проходящий последовательно через два воздушных зазора δ1 и δ2. В зависимости от полярности управляющего тока результирующий поток в одном зазоре будет уменьшаться, а в другом увеличиваться. При определенном значении тока, равном току срабатывания, якорь перебросится к одному из контактов. При изменении полярности управляющего тока якорь перебросится в противоположную сторону.
В поляризованном реле с мостовой схемой магнитной цепи (рис 22) силы притяжения якоря (включенного в одну из диагоналей моста) действует так же: в воздушном зазоре с одной стороны якоря рабочий поток направленный согласно с поляризующим потоком, а с другой – встречно. Мостовые схемы поляризованных реле имеют более высокую стабильность параметров и устойчивость к внешним механическим взаимодействиям.
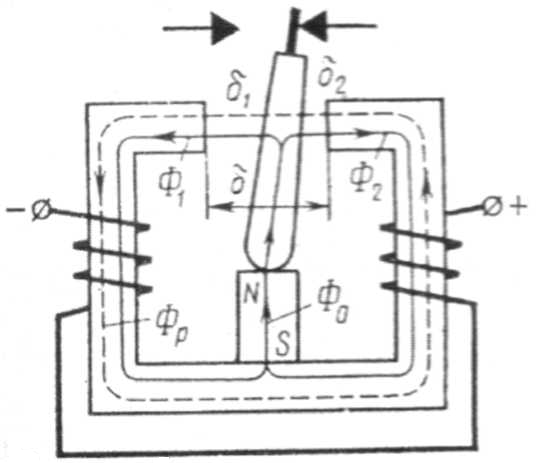
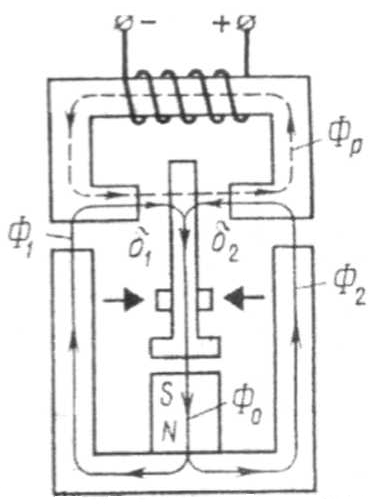
Рис.
22 Поляризованное реле с мостовой
магнитной цепью