

3.3 Модуляторы
Модуляторы являются нелинейными многополюсниками и предназначены для преобразования управляющих медленно меняющихся сигналов постоянного, снимаемых обычно с различного рода датчиков или приемников, в сигналы переменного тока пропорциональной величины с фазой, изменяющейся на 180° при перемене полярности управляющего сигнала. С помощью модулятора осуществляется управление параметрами гармонических электромагнитных колебаний.
В системах электроники и автоматики применяются модуляторы различных типов. Наибольшее распространение получили двухполупериодные модуляторы, в которых используются полупроводниковые диоды, электронные лампы, полупроводниковые транзисторы и реже фотодиоды или фототранзисторы.
3.4 Детекторы
Детектор (открыватель – лат.) – устройство в измерительном или другом приборе, служащее для различного рода преобразований электрических колебаний.
Например для нелинейной обработки сигналов, часто требующихся в измерительных приборах для определения характеристик, относящихся к величине периодического сигнала.
В зависимости от назначения детекторы делятся на: амплитудные, диодные, пиковые, среднего значения электрических сигналов, среднеквадратичного значения электрических сигналов.
Лекция 4
4.1 Устройства коммутации.
Современные устройства электроники и автоматики представляют собой сложные комплексы узлов и блоков, состоящих из отдельных, соединенных в электрическую схему элементов аппаратуры.
Важнейшие технико-эксплуатационные показатели современных устройств электроники и автоматики, такие, как правильность исполнения операций, надежность и безотказность действия устройств, стабильность их работы, экономичность и т.д. в значительной мере обеспечиваются устройствами коммутации.
Наиболее массовым и универсальным видом аппаратуры, предназначенной для коммутации тока в электрических цепях или преобразования поступающей энергии, являются коммутирующие устройства (реле).
Реле (или релейным элементом) называется устройство, в котором при определенном значении входного сигнала выходной сигнал скачкообразно принимает конечное число значений.
Реле имеют широкое применение в системах автоматики, т.к. с их помощью можно:
управлять большими мощностями на выходах посредством входных электрических сигналов сравнительно малой мощности;
выполнять логические операции;
создавать многофункциональные релейные устройства;
осуществлять коммутацию электрических цепей;
фиксировать отклонения контролируемого параметра от заданного уровня;
выполнять функции запоминающего элемента;
выполнять функции элемента цифрового устройства.
Реле классифицируются по различным признакам:
по виду физических величин, на которые они реагируют;
по выполняемым функциям в системе управления, по назначению.
По виду физических величин различают электрические, механические, тепловые, оптические, магнитные и акустические реле.
По назначению и функциям, выполняемым в системах управления, различают реле защиты, управления и контроля.
В конструкциях реле имеются воспринимающие органы, реагирующие на внешнее воздействие, коммутирующие (исполнительные), осуществляющие передачу воздействия от реле в управляемые цепи, и промежуточные органы, перерабатывающие и передающие воздействия от воспринимающих органов к коммутирующим органам.
По устройству воспринимающих органов электрические реле подразделяются на электромагнитные, магнитоэлектрические, электродинамические, индукционные, электронные, электростатические и др.
По устройству коммутирующих органов электрические реле подразделяются на контактные и бесконтактные.
Контактные реле воздействуют на управляемую цепь с помощью электрических контактов, замкнутое или разомкнутое состояние которых изменяет сопротивление электрической цепи, практически от 0 до ∞, при этом имеем или полное замыкание или полный механический разрыв выходной цепи.
Бесконтактные реле воздействуют на управляемую цепь путем резкого (скачкообразного) изменения параметров выходных электрических цепей (сопротивления, индуктивности, емкости) или изменения уровня напряжения (тока). Бесконтактное реле, по сравнению с контактными, в большинстве случаев являются более надежными и быстродействующими, а также меньшими по габаритам. Недостаток – иногда встречает затруднения, например, при коммутации малых токов.
Основными характеристиками и параметрами реле являются: характеристика управления, параметр срабатывания, параметр отпускания, коэффициент возврата, коэффициент запаса, коэффициент управления, время срабатывания, время отпускания, мощность срабатывания, рабочая мощность и управляемая мощность.
Основные виды идеализированных характеристик управления релейных элементов на рис.17.
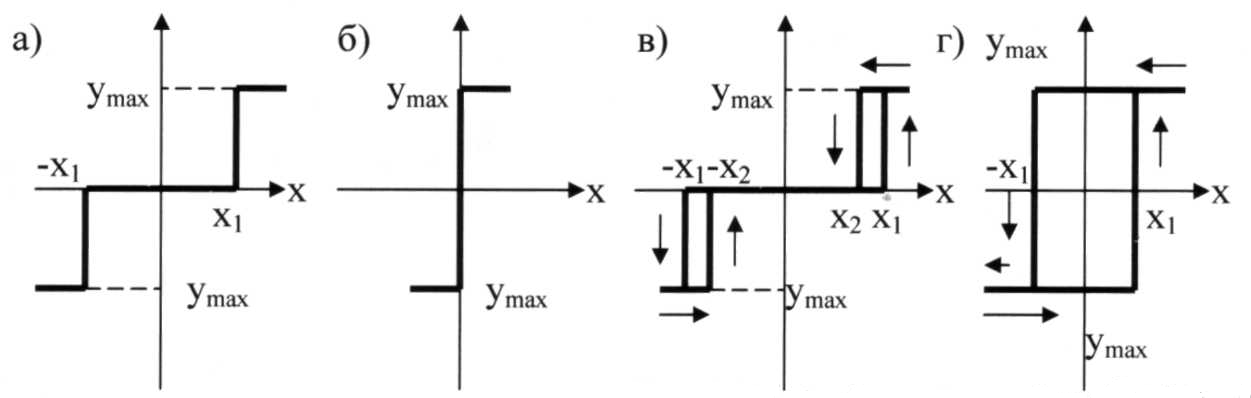
Рис. 187 Характеристика управления реле
Во всех этих характеристиках при достижении определенного значения входной величины X выходная величина Y изменяется скачкообразно или, как принято говорить, происходит срабатывание реле.
Параметры срабатывания и отпускания реле. Значение входной величины, при достижении которой выходная величина изменяется скачком от YH до YK, называется параметром срабатывания ХСР.
Значение входной величины, при достижении которой в процессе последующего ее уменьшения происходит скачок выходной величины (возврат элемента) называется параметром отпускания ХОТП.
Важными временными параметрами реле, характеризующими
его быстродействие, являются время срабатывания и время отпускания.
Время срабатывания – промежуток времени от подачи на вход сигнала Х=Хср до начала воздействия на управляемую цепь.
По времени срабатывания различают реле нормальные, быстродействующие, замедленные и реле времени.
Время отпускания – промежуток времени от подачи на вход сигнала Х=Хотп до окончания воздействия на управляемую цепь.
Мощность срабатывания Рср - минимальная мощность, которую необходимо подвести к воспринимающему органу реле, чтобы перевести его из состояния покоя в рабочее состояние.
Рабочая мощность – мощность, которую необходимо подвести к воспринимающему органу реле, чтобы обеспечить его надежное срабатывание и удержание в рабочем состоянии; она должна быть несколько больше мощности срабатывания.
Управляемая мощность – мощность, которой управляют коммутирующие органы реле в процессе подключений.
Различают электронные, полупроводниковые и магнитные бесконтактные реле и контактные электромагнитные реле.