

2.3 Цифро-аналоговые преобразователи (цап)
Двоичные коды в аналоговые эквиваленты преобразуются различными способами, но все они основаны на сложении аналоговых составляющих, пропорциональных некоторым двоичным приращениям (элементам) исходного двоичного числа.
По принципу получения аналоговых величин ЦАП можно разделить на два типа:
с суммированием единичных приращений аналоговых величин;
с суммированием с учетом веса разряда двоичного кода.
В первом случае исходное число вначале преобразуется в число – импульсный код, т.е. в соответствующее число импульсов. Затем каждому из этих импульсов ставится в соответствие постоянное единичное приращение аналоговой величины. Все приращения суммируются, в результате чего на выходе получается аналоговая величина – эквивалент исходного кода. Во втором случае для каждого разряда преобразуемого кода подбирается эталонное значение аналоговой величины, соответствующее весу данного разряда. В процессе преобразования суммируются эталоны для тех разрядов двоичного кода, в которых стоит «1». Эталоны, соответствующим разрядом кода с нулевым значением в сложении не участвуют.
Преобразователи кода в напряжение. Пример схемы преобразователя двоичного кода в напряжение представлен на рис.10.
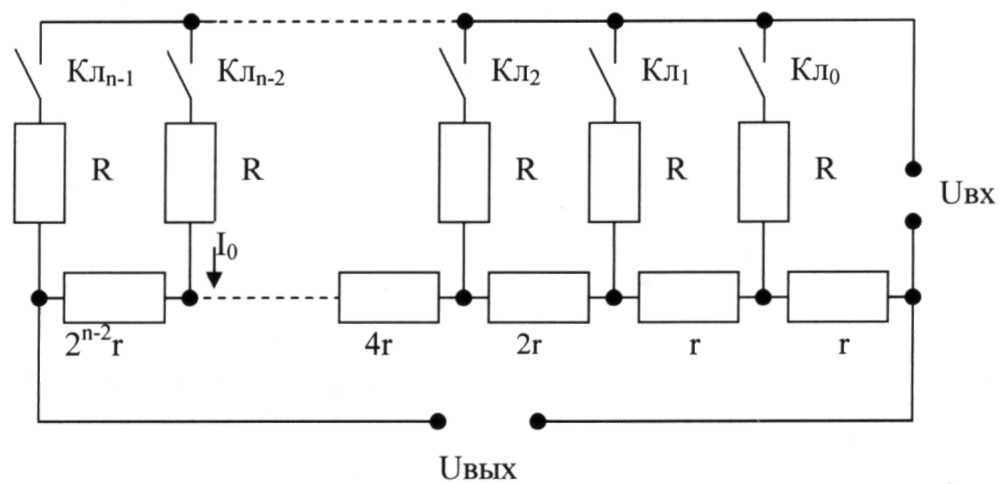
Рис. 10 Схема преобразования кода в напряжение
Эта схема основана на принципе суммирования токов,
пропорциональных весам разрядов двоичного кода. Ключи Кл0,…,Клn-1 этой схемы управляются от триггеров счетчика или регистра, с которого снимается преобразуемый код. При нулевых значениях разрядов преобразуемого кода ключи открыты, при единичных – закрыты. Резисторы R и r в этой схеме эталонные, причем R много больше r, и источник питания этой схемы стабилизированный. Токи I0, проходящие по резисторам R, создают на резисторах r, 2r, 4r, … падение напряжения UВЫХ, пропорциональное преобразуемому двоичному коду. Благодаря тому, что сопротивления на резисторах r, 2r, 4r… удваиваются, в зависимости от веса разряда, подключающего ток I0, напряжение на выходе будет пропорционально значению преобразуемого кода.
Преобразователи кода в угол поворота. Преобразователи кода в угол поворота часто называют цифровыми следящими системами. Одна из возможных схем цифровой следящей системы представлена на рис.11.
Схема работает следующим образом. На сумматор цифровой следящей системы поступают по каналам параллельные коды. Один код поступает от задающего устройства – ЭВМ, а второй – от преобразователя «вал - код» ПВК. В сумматоре происходит вычитание этих кодов. Разность кодов ∆ поступает на преобразователь «код–напряжение» ПКН, а с его выхода – на вход усилителя У следящей системы. Усиленный сигнал передается на управляющую обмотку исполнительного двигателя ДВ следящей системы. Двигатель ДВ поворачивает датчик Д на угол, пропорциональный выходному коду сумматора. Двигатель ДВ поворачивает датчик Д до тех пор, пока разность ∆ на выходе сумматора не будет равна нулю. В этом случае угол поворота двигателя или датчика будет с определенной точностью соответствовать входному двоичному коду.
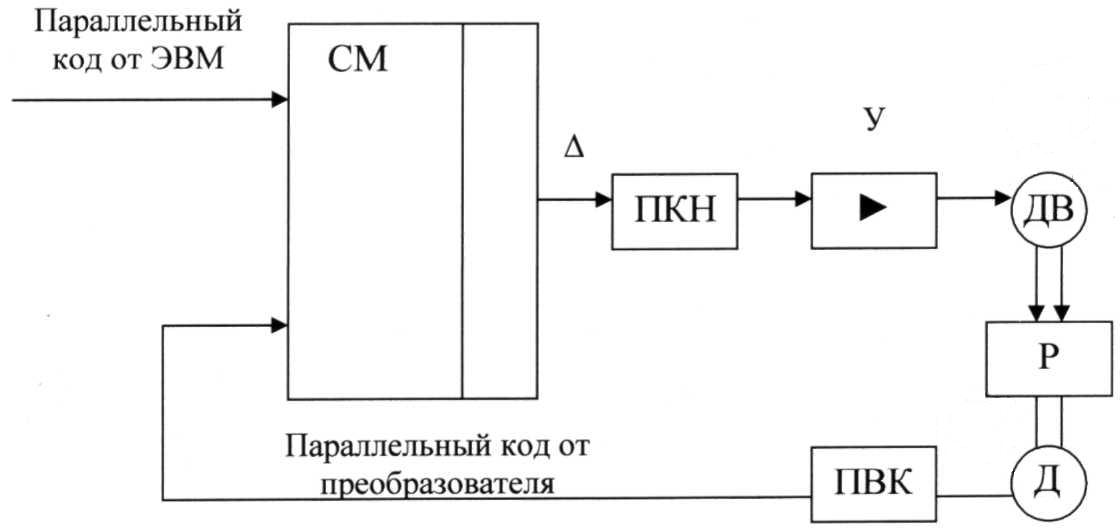
Рис. 11 Схема преобразователя кода в угол поворота
СМ – сумматор; ПКН – преобразователь «Код-напряжение»; У – усилитель; ДВ – двигатель; Р – редуктор; Д – датчик; ПВК – преобразователь «вал-код»
ЛЕКЦИЯ 3 (Дополнительные элементы обработки сигналов)