

19.2 Приборы с индуктивными преобразователями
В этих приборах изменение контролируемой величины преобразуется в изменение индуктивности электрической цепи в соответствии с формулой
 ,
,
где L и W – соответственно индуктивность и число витков катушки; li, Si, μi – соответственно длина, площадь и магнитная проницаемость i участка магнитной цепи (в том числе ферромагнитных и воздушных участков).
Конструкции индуктивных преобразователей основаны на зависимости индуктивности от зазора l между подвижной частью (якорем, связанным с измерительным наконечником) и сердечником (рис.44 а и в) либо площади S их перекрытия (рис. 44 б и г).
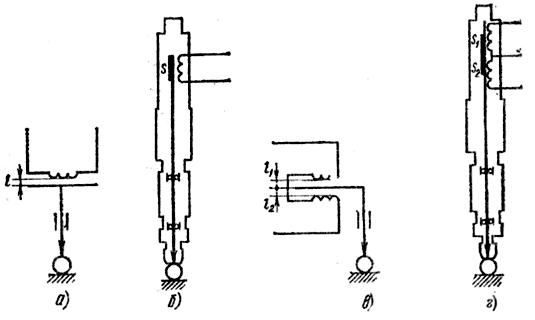
Рис. 42 Схемы индуктивных преобразователей:
а,б-простые, в,г-дифференциальные
Индуктивные преобразователи могут быть построены по простой (рис.44 а и б) или дифференциальной (рис.44 в и г) схеме.
Преобразователи с изменяющимся зазором используют для контроля малых перемещений (0,1-5000мкм), преобразователи с изменяющейся площадью, имеющие большую линейность характеристики, используют для контроля перемещений 0,5-15мм. Магнитопроводы изготавливают из ферромагнитного железа либо из феррита. Частота питания измерительных обмоток 3-15кГц.
В преобразователях, основанных на вихревых токах (рис.45), роль вторичной обмотки выполняет поле вихревых токов, наводимых в контролируемой детали. О контролируемом расстоянии судят по изменению индуктивности и потерь в первичной обмотке. С помощью преобразователей можно измерять толщину диэлектрических покрытий на любых токопроводящих материалах, но нельзя измерять толщину металлического ферромагнитного покрытия на ферромагнитном основании.
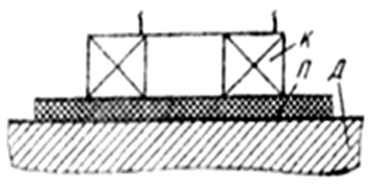
Рис. 43 Схема преобразователя, основанного на вихревых токах:
Д-деталь, П-покрытие, К-катушка
Цена деления индуктивных преобразователей от 0,01-50мкм, диапазон показаний 40-100 делений. Преимущества индуктивных датчиков - малые габариты, аналоговая форма выдаваемого сигнала, высокое передаточное отношение и широкие возможности по передаче, запоминанию и проведению различного рода математических преобразований и вычислений на ЭВМ. Однако эти приборы сложнее и дороже электроконтактных.
19.3 Приборы с емкостными преобразователями
В этих приборах изменение контролируемой величины преобразуется в изменение электрической емкости С,Ф, электрической цепи, обычно в соответствии с формулой
![]() ,
,
где ε - диэлектрическая проницаемость, Ф/м; S площадь перекрытия обкладок конденсатора, см2; d - расстояние между обкладками, мм.
Следовательно, возможно создание трех видов емкостных преобразователей с изменяющимися параметрами ε, S и d.
На рис.46 показаны схемы простых и дифференциальных преобразователей. Емкостные преобразователи обладают высокой линейностью выходной характеристики, высокой чувствительностью, малыми измерительными усилиями.
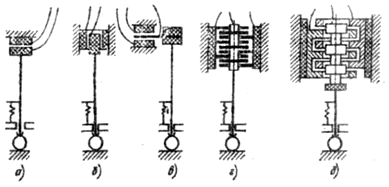
Рис. 46 Схемы емкостных преобразователей:
а,б - простых, в,г,д - дифференциальных
Специальные их конструкции позволяют обеспечить большой диапазон показаний. Однако, емкостные преобразователи очень чувствительны к изменяющимся внешним условиям (колебаниям температуры, влажности окружающей среды и т.д.), что ограничивает область их применения.