

15.2 Преобразователи скорости
К наиболее часто встречающимся преобразователям скорости относятся центробежные преобразователи и тахогенераторы.
Центробежный преобразователь скорости преобразует скорость вращения какого-либо вала в механическое перемещение муфты (рис. 37).
П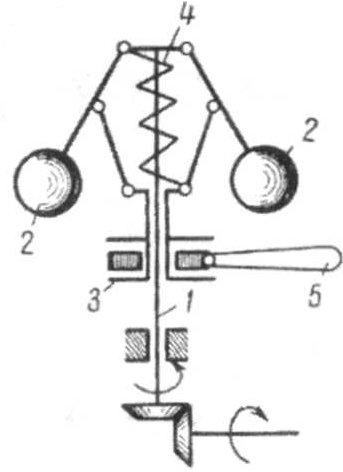 редположим,
что центробежные преобразователь
скорости служит для измерения отклонения
скорости вращения двигателя от заданного
значения. Входной валик 1 измерителя
сцепляется с ротором двигателя, скорость
вращения которого измеряется. Центробежная
сила перемещает грузик 2, а вместе с ним
муфту измерителя 3. Центробежная сила
уравновешивается силой пружины 4, поэтому
каждому значению скорости вращения
вала соответствует определение муфты
3. Муфта 3 может перемещаться не только
при изменении скорости вращения, но и
при воздействии на орган настройки 5,
изменяющий натяжение пружины 4. Воздействие
на орган настройки позволяет задать
скорость вращения, которую должна
поддерживать система
редположим,
что центробежные преобразователь
скорости служит для измерения отклонения
скорости вращения двигателя от заданного
значения. Входной валик 1 измерителя
сцепляется с ротором двигателя, скорость
вращения которого измеряется. Центробежная
сила перемещает грузик 2, а вместе с ним
муфту измерителя 3. Центробежная сила
уравновешивается силой пружины 4, поэтому
каждому значению скорости вращения
вала соответствует определение муфты
3. Муфта 3 может перемещаться не только
при изменении скорости вращения, но и
при воздействии на орган настройки 5,
изменяющий натяжение пружины 4. Воздействие
на орган настройки позволяет задать
скорость вращения, которую должна
поддерживать система
стабилизации скорости при помощи центробежного датчика.
Т
Рис.
36 Центробежный преобразователь скорости ахогенератор
служит для преобразования механического
вращения в электрический сигнал
(напряжение). В тахогенераторе скорость
вращения пропорциональна э.д.с,
индуктируемой в его обмотке. Следовательно,
тахогенератор может быть использован
для измерения или для автоматического
регулирования скорости вращения.
Тахогенератор используется также для
электрического дифференцирования и
для получения ускоряющих и замедляющих
сигналов.
ахогенератор
служит для преобразования механического
вращения в электрический сигнал
(напряжение). В тахогенераторе скорость
вращения пропорциональна э.д.с,
индуктируемой в его обмотке. Следовательно,
тахогенератор может быть использован
для измерения или для автоматического
регулирования скорости вращения.
Тахогенератор используется также для
электрического дифференцирования и
для получения ускоряющих и замедляющих
сигналов.
П
Рис.
37 Схема тахогенератора
Ротор Р тахогенератора представляет собой дискообразный постоянный магнит с несколькими полюсами; число полюсов всегда четное, а северный (N) и южный (S) чередуются. На внутренней стороне статора С имеются пазы, в которые заложена обмотка статора (на рис. 45 условно не показана); концы обмотки выведены на зажимы. При вращении ротора его постоянный магнитный поток пересекает обмотку статора и индуктирует в ней э.д.с. Е. Действующее значение этой э.д.с.
![]() ,
,
где КW - постоянная, зависящая от конструкции машины и ее обмотки; P - число пар полюсов обмотки статора; W - число витков обмотки статора; n – частота вращения ротора; ФМАКС - амплитудное значение магнитного потока.
Из формулы видно, что э.д.с. зависит от скорости вращения п ротора, но при изменении скорости вращения изменяется также частота э.д.с. f, а изменение частоты влияет на величину сопротивления переменного тока как обмотки машины, так и реактивной составляющей сопротивления нагрузки. Следовательно, в синхронном тахогенераторе не может быть линейной зависимости напряжения от скорости вращения. Поэтому в автоматических схемах синхронный тахогенератор не применяется.
К недостаткам асинхронных тахогенераторов с полым ротором следует отнести:
небольшое отклонение выходной характеристики (т.е. зависимости выходного напряжения от скорости вращения при постоянной нагрузке) от линейности (амплитудная погрешность);
зависимость угла между векторами напряжения питания UУ и выходного напряжения UВЫХ от скорости вращения (фазовая погрешность).
Наряду с тахогенераторами переменного тока применяются тахогенераторы постоянного тока.
Достоинства тахогенераторов постоянного тока:
отсутствие фазовой погрешности;
отсутствие в их схемах нагрузок различного характера (активной, индуктивной и емкостной), которые оказывают влияние на величину выходного напряжения и форму выходной характеристики.
Недостатки тахогенераторов постоянного тока:
более сложная конструкция по сравнению с тахогенераторами переменного тока;
наличие скользящего контакта между коллектором и щетками;
необходимость устройства защитных фильтров от радиопомех;
более высокая стоимость.
Какие датчики еще существуют? Принципы их работы и области применения?
Проверочная работа!!!
СЕМЕСТР II
ЛЕКЦИЯ 16
16.1 Исполнительные устройства
В качестве исполнительных устройств средств реализации измерительной информации используются: электромагниты, шаговые электродвигатели, миниатюрные электродвигатели с редукторами, электромеханические преобразователи.
Основным исполнительным устройством, которое в основном предопределяет статические и динамические параметры автоматических средств измерений, является электроизмерительный преобразователь, который называют регистратором.
Принцип действия регистраторов магнитоэлектрического типа, применяемых в автоматических средствах измерений показан на рис.39.
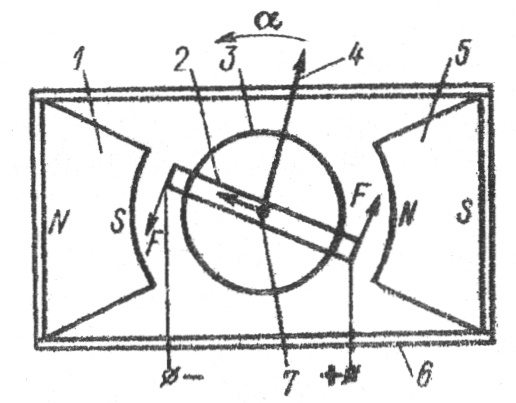
Рис. 39 Схема магнитоэлектрического регистратора
Подвижная рамка 2 с обмоткой помещена в магнитном поле постоянных магнитов 1 и 5. Рамка 2 с сердечником 3 закреплена на оси 7. На этой же оси закреплены пишущий элемент 4 и спиральная пружина (на рис. не показана). Все элементы расположены в корпусе 6.
Между рамкой 2 и постоянными магнитами имеется зазор, в котором создается равномерное радиальное магнитное поле. При пропускании через обмотку рамки 2 постоянного электрического тока, величина которого пропорциональна измеряемому размеру, на каждую боковую сторону рамки 2 действует тангенциальная сила F, пропорциональная току, протекающему по обмотке рамки, создавая вращающий момент, равный
МВР=КВΨJ,
где КВ – коэффициент пропорциональности; Ψ – потокосцепление магнитной системы; J – ток в обмотке рамки 2.
Противодействующий момент создается спиральной или другого типа пружиной; он пропорционален углу закручивания пружины, т.е. углу поворота пишущего элемента
МПР=КП∙α
где КП – жесткость упругих противодействующих элементов; α – угол отклонения подвижной части регистратора.
В установившемся режиме, исходя их обеих формул имеем: МВР= МПР;
КВΨJ=КП∙α,
откуда
![]()
Параметр
![]() называют чувствительностью регистраторов.
Его стремятся выполнить постоянным во
всем диапазоне измерения, минимизируя
при этом статистические погрешности
автоматического средства измерения.
Магнитная система регистратора и
противодействующие упругие элементы
должны быть спроектированы таким
образом, чтобы как потокосцепление
магнитной системы, так и жесткость
упругих элементов оставались постоянными
для любого угла α.
называют чувствительностью регистраторов.
Его стремятся выполнить постоянным во
всем диапазоне измерения, минимизируя
при этом статистические погрешности
автоматического средства измерения.
Магнитная система регистратора и
противодействующие упругие элементы
должны быть спроектированы таким
образом, чтобы как потокосцепление
магнитной системы, так и жесткость
упругих элементов оставались постоянными
для любого угла α.
Конструкция регистратора также оказывает существенное влияние на динамические погрешности автоматических средств измерений.
Перемещение
диаграммной бумаги в указанных устройствах
осуществляется малогабаритными
электродвигателями. Чаще всего применяются
синхронные двигатели переменного тока,
реже двигатели постоянного тока. Эти
двигатели должны обладать абсолютно
жесткими механическими характеристиками,
т.е. ![]() ,
где n
– число оборотов;
,
где n
– число оборотов; ![]() - момент нагрузки на валу; они должны
обладать самозапуском, работать без
шума и вибрации, не должны создавать
помехи при работе. Вал двигателя
соединяется с миниатюрным переключающим
редуктором.
- момент нагрузки на валу; они должны
обладать самозапуском, работать без
шума и вибрации, не должны создавать
помехи при работе. Вал двигателя
соединяется с миниатюрным переключающим
редуктором.
Малогабаритные электродвигатели применяются также для перевода кареток и поворота барабанов в электромеханических печатающих устройствах, поворота лотков в сортировочных поворотных устройствах и привода сортировочных роботов и транспортеров. Поворотные сортировочные устройства, сортировочные роботы – манипуляторы и транспортеры могут перемещаться шаговыми электродвигателями. Шаг расположения сортировочных заслонок lC должен быть кратен номинальному угловому шагу α электродвигателя. В поворотных сортировочных устройствах должно соблюдаться условие
![]() ,
k=
1,2,3,…,n,
,
k=
1,2,3,…,n,
где k – коэффициент кратности; r – радиус поворотного устройства; α – номинальный шаг электродвигателя в град.
В сортировочных роботах и транспортерах перемещение транспортирующего органа, вызванное поворотом электродвигателя на один шаг, также должно быть меньше или равно шагу расположения сортировочных отсеков.
Наиболее распространенным исполнительным органом печатающих и сортировочных устройств является электромагнит. Время срабатывания электромагнита tX1=tTP+tЯ1, где tTP – время трогания, определяемое временем нарастания тока в катушке электромагнита до начала движения якоря; tЯ1 – время движения якоря до полного открытия сортировочной заслонки или нанесения символа в печатающем устройстве.
В ремя
отпускания магнита tX2=tСП+tЯ2,
где tСП
– время спада тока до момента начала
движения якоря; tЯ2
– время движения якоря до возвращения
в исходное положение.
ремя
отпускания магнита tX2=tСП+tЯ2,
где tСП
– время спада тока до момента начала
движения якоря; tЯ2
– время движения якоря до возвращения
в исходное положение.
Тяговые усилия F электромагнита определяются по формуле F=O1SkJ2W, где k – коэффициент, зависящий от конструкции якоря, формы поля в рабочем зазоре и материала якоря и магнитопровода; J – сила тока в катушке; W – число витков катушки.
Знания коэффициентов k для различных видов полюсных поверхностей электромагнитов широко освещены в соответствующей литературе.
В
Рис.
38 Схемы магнитных сортировочных
устройств
В сортировочных устройствах уменьшение хода якоря и нагрузки на якорь может быть достигнуто расположением заслонок по краям детали и за счет применения промежуточных элементов.
Значительно сократить временные составляющие работы электромагнитов позволяют беззаслоночные сортировочные устройства (рис.40), у которых время tX1+tX2 не превышает 0,01 с.
Снижение времени tX2 электромагнитов может быть достигнуто установкой медной шайбы между дном якоря и пяткой, к которой притягивается якорь, либо наличием незначительного зазора между пяткой и якорем электромагнита в притянутом состоянии.
Для увеличения быстродействия работы электромагнитов в печатающих устройствах применяются схемы импульсной передачи напряжения. В этом случае амплитуда кратковременного импульса может превышать допустимую амплитуду напряжения, указанную в паспорте электромагнита.