

2. Різні форми задач лінійного програмування
Розглянемо деякі математичні моделі задач планування й управління, що зводяться до задач оптимального керування.
Визначення найкращого складу суміші. Це одна з перших задач лінійного програмування.
Нехай нам відомо вміст необхідних для годування тварин поживних речовин у різних застосовуваних кормах. Відома також ціна одиниці кожного виду корму. Потрібно вибрати раціон – набір і кількість кормів – так, щоб кожна поживна речовина містилася у ньому в необхідній кількості і, крім того, щоб сумарні затрати на цей раціон були мінімальні.
Оптимальним планом є така впорядкованість чисел x1, x2, …, xn , які повинні задовольняти наступні обмеження:
x1 0, x2 0, …, xn 0.
 та
мінімізувати сумарні витрати, тобто
та
мінімізувати сумарні витрати, тобто
 ,
де
,
де
m – кількість різних необхідних поживних речовин;
n – кількість видів кормів;
аіk – кількість одиниць і-й поживній речовині, що міститься в одиниці k-го виду корму;
bi – мінімальна добова потреба в і-ї поживної речовини;
сk – вартість одиниці k-ого виду корму;
xk – кількість одиниць k-ого виду корму, що використовується у раціоні.
Аналогічний приклад про склад шифти. Відомо, що для одержання легованої сталі потрібно використати шихту певного хімічного складу. Багато інгредієнтів шихти достатньо дорогі. У той самий час у склад шихти входять малоцінні матеріали – чавун, лом, відходи. Виникає задача про вибір такої шихти, у склад якої входили б у заданій кількості необхідні хімічні речовини, а вартість її була б мінімальною.
Задача про оптимальний план випуску продукції. Ця задача виникає при складанні планів випуску продукції підприємством і тому має важливе практичне значення. Суть її полягає у наступному: нехай на підприємстві випускається n найменувань різних видів продукції. Позначимо через аіj витрати i-го виду ресурсів (i= 1, 2, 3, …, m) на виробництво одиниці продукції j-го виду (j=1, 2, 3,…, n), через bi — повні обсяги наявних ресурсів (i= 1, 2, 3, …, m), ci — прибуток, одержаний підприємством при виготовленні й реалізації одиниці i-го виду продукту, аі та Аі відповідно, наперед задану нижню й верхню границі за обсягом випуску i-го виду продукції. Потрібно скласти такий план випуску продукції, який би приносив найбільший прибуток підприємству і який би був технологічно здійсненним за всіма наявними ресурсами. Маємо таку математичну модель:
1.
![]() –
технологічні обмеження.
–
технологічні обмеження.
2.
![]() –
обмеження на обсяги окремих видів
випускаючої продукції, що випускається
і при цьому досягався б максимум.
–
обмеження на обсяги окремих видів
випускаючої продукції, що випускається
і при цьому досягався б максимум.
![]() –
загальний
прибуток від виробництва й реалізації
продукції.
–
загальний
прибуток від виробництва й реалізації
продукції.
Оптимізація міжгалузевих потоків. Нехай маємо n галузей господарства, кожна із яких виробляє лише один специфічний вид продукції, причому кожний вид продукції використовується у виробництві в усіх n галузях. Нехай xi – обсяг виробництва в i-й галузі, yi – обсяг продукту і-го виду для позавиробничої потреби, aij – коефіцієнти прямих затрат продукції j-го виду на виробництво в і-й галузі одиниці продукції і-го виду, Ni – максимально можливий обсяг виробництва в і-й галузі, di – потрібна для позавиробничої потреби кількість продукції і-го виду, ci – вартість одиниці продукції і-го виду.
Треба знайти такі можливі у заданих умовах обсяг виробництва xi і такий план випуску кінцевої продукції yi (i= 1, 2, 3, …, n), при якому максимізується загальна вартість виробленого кінцевого продукту.
Математична модель цієї задачі може бути подана у такому вигляді:
1.
![]() –
обмеження на обсяги виробництва;
–
обмеження на обсяги виробництва;
2.
![]() –
обмеження на випуск кінцевого продукту;
–
обмеження на випуск кінцевого продукту;
3.
![]() –
технологічні обмеження на випуски
продукції.
–
технологічні обмеження на випуски
продукції.
Отже, потрібно знайти такі вектори x = (x1, x2, …, xn) та y = (y1, y2, …, yn), щоб
![]() .
.
Серед таких задач також виділяють транспортну задачу, задачу Кантаровича про вибір виробничої програми, задачу про призначення, модель Неймана розширювальної економіки, оптимізація потоку газу в мережі та ін.
У
найзагальнішому вигляді математично
поставлена задача лінійного програмування
формулюється таким чином: треба знайти
такі значення
![]() змінних x1,
x2,
…, xn,
які задовольняють систему співвідношень
виду
змінних x1,
x2,
…, xn,
які задовольняють систему співвідношень
виду
При цьому визначається найбільше (найменше значення) цільової функції
![]() порівняно
з її значеннями при всіх інших наборах
значень змінних x1,
x2,
…, xn,
що задовольняють задану систему. Під
Ri
(i=
1, 2, 3, …, s)
розуміють один із знаків =,
порівняно
з її значеннями при всіх інших наборах
значень змінних x1,
x2,
…, xn,
що задовольняють задану систему. Під
Ri
(i=
1, 2, 3, …, s)
розуміють один із знаків =,![]() ,
ai,
ci,
aij
(i=
1, 2, 3, …, s;
j=1,
2, 3, …, n)
–
задані дійсні числа. Всі ліві частини
цих співвідношень та цільова функція
лінійні відносно змінних, тому цю задачу
називають задачею лінійного програмування.
,
ai,
ci,
aij
(i=
1, 2, 3, …, s;
j=1,
2, 3, …, n)
–
задані дійсні числа. Всі ліві частини
цих співвідношень та цільова функція
лінійні відносно змінних, тому цю задачу
називають задачею лінійного програмування.
3. Геометричний зміст задач лінійного програмування при n=2,3
У простішому випадку задача лінійного програмування містить усього дві змінних. Неважко одержати її геометричну інтерпретацію й розв’язати задачу геометрично. Нехай дана задача:
![]()
Уведемо
на декартовій площині прямокутну систему
координат і зіставимо кожну пару чисел
(x1,
x2)
із
точкою площини з координатами x1
та
x2.
Нерівність
![]() визначає на площині одну з двох півплощин,
на котрі пряма
визначає на площині одну з двох півплощин,
на котрі пряма
![]() розбиває площину. При цьому відповідна
півплощина містить і граничну пряму
розбиває площину. При цьому відповідна
півплощина містить і граничну пряму
![]() .
Щоб установити, яку саме півплощину
визначає ця нерівність, достатньо
підставити в неї координати однієї
якої-небудь точки, що не лежить на
граничній прямій. Якщо нерівність
задовольняється, то шукана півплощина
та, у котрій лежить узята точка, а якщо
не задовольняється –
то протилежна їй.
.
Щоб установити, яку саме півплощину
визначає ця нерівність, достатньо
підставити в неї координати однієї
якої-небудь точки, що не лежить на
граничній прямій. Якщо нерівність
задовольняється, то шукана півплощина
та, у котрій лежить узята точка, а якщо
не задовольняється –
то протилежна їй.
Приклади. Знайти допустимі області задач лінійного програмування з обмеженнями:
1)
 2)
2)
 3)
3)
Третій приклад має допустиму область пусту. На цих прикладах ми бачимо, що допустима область задачі лінійного програмування може бути пустою (3), непустою й обмеженою (1), непустою й необмеженою (2). Якщо допустима область непуста, то вона являє собою деякий многокутник (може бути і необмежений). Умовно будемо називати многокутниками допустимі області й у тих випадках, коли вони виродилися в смугу, пряму, відрізок, точку. Очевидно, в усіх випадках відрізок, що з’єднує будь-які дві точки допустимої області, цілком міститься в ній. Області з такими властивостями називаються опуклими. Таким чином, допустима область задачі лінійного програмування, якщо вона не пуста, то вона є опуклою.
Як
геометрично знайти оптимальні точки
(тобто точки, що відповідають оптимальним
рішенням цієї задачі)? Оптимальними є
ті точки допустимої області, координати
котрих надають цільовій функції
найбільшого значення. Функція
![]() набуває одне і те ж значення, а в усіх
точках прямої
набуває одне і те ж значення, а в усіх
точках прямої
![]() ,
де а
–
деяке дійсне число. Вважаючи а
параметром, одержуємо сімейство
паралельних прямих (так званих ліній
постійного значення або ліній рівня
функції
,
де а
–
деяке дійсне число. Вважаючи а
параметром, одержуємо сімейство
паралельних прямих (так званих ліній
постійного значення або ліній рівня
функції
![]() ).
Нас цікавлять, згідно з нашою задачею,
ті точки допустимої області, котрі
належать лінії рівня з найбільшим
значенням а
порівняно з його значенням для всіх
інших ліній рівня, що перетинаються з
допустимою областю.
).
Нас цікавлять, згідно з нашою задачею,
ті точки допустимої області, котрі
належать лінії рівня з найбільшим
значенням а
порівняно з його значенням для всіх
інших ліній рівня, що перетинаються з
допустимою областю.
Легко помітити, що значення а (а отже, і значення функції ) зростають необмежено, якщо переміщувати пряму у напрямі її нормалі — вектора с =(с1, с2), і спадають, якщо переміщувати її у напрямку
с =(-с1, -с2). Таким чином, щоб знайти оптимальні точки, потрібно переміщувати пряму у напрямку вектора с =(с1, с2), починаючи з якого-небудь фіксованого положення, при котрому вона перетинається з допустимою областю до тих пір, поки не перестане перетинатися з останньою. Перетин допустимої області з лінією рівня у тому її положенні, коли подальше переміщення дає пустий перетин, і буде множиною оптимальних точок задачі лінійного програмування. У випадку задачі мінімізації лінію рівня потрібно переміщувати у напрямі, протилежному напряму вектора с =(с1, с2).
Приклади
Знайти
 за
умов:
за
умов:
Побудуємо
допустиму область, вектор с=(2,
-1)
і проведемо лінію рівня
![]() через
точку О (0,
0).
Тепер будемо переміщувати цю пряму
паралельно самій собі у напрямі,
протилежному с
(задача на мінімум!). Очевидно, лінія
рівня останній раз перетне допустиму
область, коли пройде через точку А,
координати котрої як точки перетину
прямих x1=0
та
–x1+x2=1
дорівнюють
(0,
1).
Точка А(0,1)
–
єдина оптимальна точка (єдине оптимальне
рішення), а f(0,1)=-1
– її
оптимум.
через
точку О (0,
0).
Тепер будемо переміщувати цю пряму
паралельно самій собі у напрямі,
протилежному с
(задача на мінімум!). Очевидно, лінія
рівня останній раз перетне допустиму
область, коли пройде через точку А,
координати котрої як точки перетину
прямих x1=0
та
–x1+x2=1
дорівнюють
(0,
1).
Точка А(0,1)
–
єдина оптимальна точка (єдине оптимальне
рішення), а f(0,1)=-1
– її
оптимум.
Знайти
 за
умов:
за
умов:
Ця задача відрізняється від попередньої тільки тим, що замість мінімуму нас цікавить її максимум. Отже, лінію рівня функції тепер потрібно переміщувати у напрямі вектора с. Очевидно, що як би довго ми не переміщували її в указаному напрямі, вона буде мати непустий перетин з допустимою областю. Тобто у допустимій області знайдуться точки, в котрих цільова функція має як завгодно велике наперед задане значення. Отже, ця задача не має розв’язку: цільова функція не обмежена (зверху) на допустимій множині.
Висновок
1) для n=2 геометрично очевидна наступна необхідна і достатня умова існування оптимального розв’язку
Задача лінійного програмування на максимум (на мінімум) тоді й тільки тоді має оптимальний розв’язок, коли її цільова функція обмежена зверху (відповідно знизу) в допустимій області;
2) допустима область і множина оптимальних точок – опуклі множини (якщо вони не пусті);
3) обмеженість цільової функції в допустимій області (відповідно зверху або знизу) є необхідною та достатньою умовою розв’язування;
4) оптимум задачі досягається у вершині допустимої області (якщо допустима область має вершини й задача має розв’язки).
Для випадку n=3 зазначені вище твердження залишаються справедливими, і вони мають місце для задачі лінійного програмування й у загальному випадку.
Алгоритм графічного методу розв’язання задач лінійного керування:
Будуємо область допустимих розв’язків.
Будуємо вектор с і перпендикуляр до нього (лінію рівня).
Рухаємо лінію рівня паралельно собі в напрямку вектора с, визначаючи останню точку.
Знаходимо координати xmax чи xmin та значення z.
Задача лінійного програмування полягає у відшукуванні на множині допустимих планів такого плану, який би мінімізував цільову функцію F. Такий план і буде оптимальним. Якщо кількість змінних системи обмежень та цільової функції у математичній моделі задачі лінійного програмування дорівнює 2 або 3, то таку задачу можна розв’язати графічно. Ознайомимося з графічним методом розв’язування на конкретних прикладах.
Задача. Процес виготовлення двох видів виробів заводом потребує, по-перше, послідовного оброблення на токарних та фрезерних верстатах і, по-друге, затрат двох видів сировини: сталі й кольорових металів. Дані про потреби кожного ресурсу на одиницю виготовленого виробу та загальні запаси ресурсів розміщені у таблиці 8. 3. 1. Прибуток від реалізації одиниці виробу А — 3 тис. грн., одиниці виробу В – 8 тис. грн. Визначити такий план випуску продукції, який забезпечує максимальний прибуток за умови, що час роботи фрезерних верстатів повинен бути використаний повністю.
Таблиця 7.3.1.
|
Затрати на 1 виріб |
|
||
А |
В |
Ресурси |
||
Матеріали |
Сталь (кг) |
10 |
70 |
320 |
Кольорові метали (кг) |
20 |
50 |
420 |
|
Обладнання |
Токарні верстати (верстато-годин) |
300 |
400 |
6200 |
Фрезерні верстати (верстато-годин) |
200 |
100 |
3400 |
|
Прибуток на виріб (у тис. грн.) |
3 |
8 |
|
|
Розв’язання. Побудуємо математичну модель задачі. Позначимо через x кількість виробів виду А, через y – кількість виробів виду В. На виготовлення всієї продукції піде (10x + 70y) кг сталі та (20x + 70y) кг кольорових металів. Оскільки запаси сталі не перевищують 320 кг, а кольорових металів – 420 кг, то
![]()
Час оброблення всіх виробів на токарних верстатах дорівнює (300x + 400y) верстато-годин. З умови задачі випливає, що
![]()
Ураховуючи, що фрезерні верстати використовуються максимально, маємо
200x + 100y = 3400.
Отже, система обмежень цієї задачі така:
![]() (1)
(1)
Загальний прибуток може бути виражений наступною функцією:
F = 3x + 8y. (2)
Виразимо y через x із рівняння 200x + 100y = 3400 і підставимо одержаний вираз замість y в останні обмеження та функцію
![]() (3)
(3)
F = 3x + 8(34 – 2x) = -13x + 272. (4)
Здійснимо перетворення системи (3)
![]()
![]()
![]()
![]() (5)
(5)
Очевидно, що F = 272 – 13x набуває найбільшого значення, якщо x = 16.
Fmax = 272 - 13·16 = 64 (тис. грн.).
Розв’яжемо цю задачу графічно.
Математична модель цієї задачі представляється системою обмежень (1),
на множині розв’язків якої потрібно знайти найбільше значення цільової функції
F = 3x + 8y. (6)
Необхідно
знайти множину точок площини (множину
допустимих планів), координати яких
задовольняють систему обмежень (1)
(рис. 8.3.1). Нерівності
![]() та
та
![]() показують, що множина допустимих планів
розміщена у першому квадранті. Інші
нерівності системи задають у першому
квадранті фігуру OACKL
(вона позначена штрихуванням). Рівняння
2x
+ y
= 34 із
прямокутника OACKL
виділяє множину допустимих планів. Це
точки відрізка EN.
Серед точок
цього відрізка виберемо таку, в котрій
цільова функція F
досягає максимального значення. Для
цього за допомогою рівняння 3x
+ 8y = С будуємо
декілька прямих (лінії рівня F),
надаючи C
довільного значення (наприклад, 120,
240
й ін.). Так одержуємо сімейство паралельних
між собою прямих. Із збільшенням значення
С
пряма 3x + 8y =
C буде рухатися
вгору-направо (рис. 8.3.1). Останньою точкою
відрізка EN,
якої торкнеться пряма
показують, що множина допустимих планів
розміщена у першому квадранті. Інші
нерівності системи задають у першому
квадранті фігуру OACKL
(вона позначена штрихуванням). Рівняння
2x
+ y
= 34 із
прямокутника OACKL
виділяє множину допустимих планів. Це
точки відрізка EN.
Серед точок
цього відрізка виберемо таку, в котрій
цільова функція F
досягає максимального значення. Для
цього за допомогою рівняння 3x
+ 8y = С будуємо
декілька прямих (лінії рівня F),
надаючи C
довільного значення (наприклад, 120,
240
й ін.). Так одержуємо сімейство паралельних
між собою прямих. Із збільшенням значення
С
пряма 3x + 8y =
C буде рухатися
вгору-направо (рис. 8.3.1). Останньою точкою
відрізка EN,
якої торкнеться пряма
3x + 8y = C, буде точка E. Визначимо її координати.
Для цього достатньо розв’язати систему рівнянь
![]() (7)
(7)
оскільки точка E є перетином прямих 2x + y =34 та 2x + 5y = 42. Розвязком системи (7) є пара (16; 2).
Цей розв’язок є оптимальним планом.
Fmax = 3·16 + 8·2 = 64.
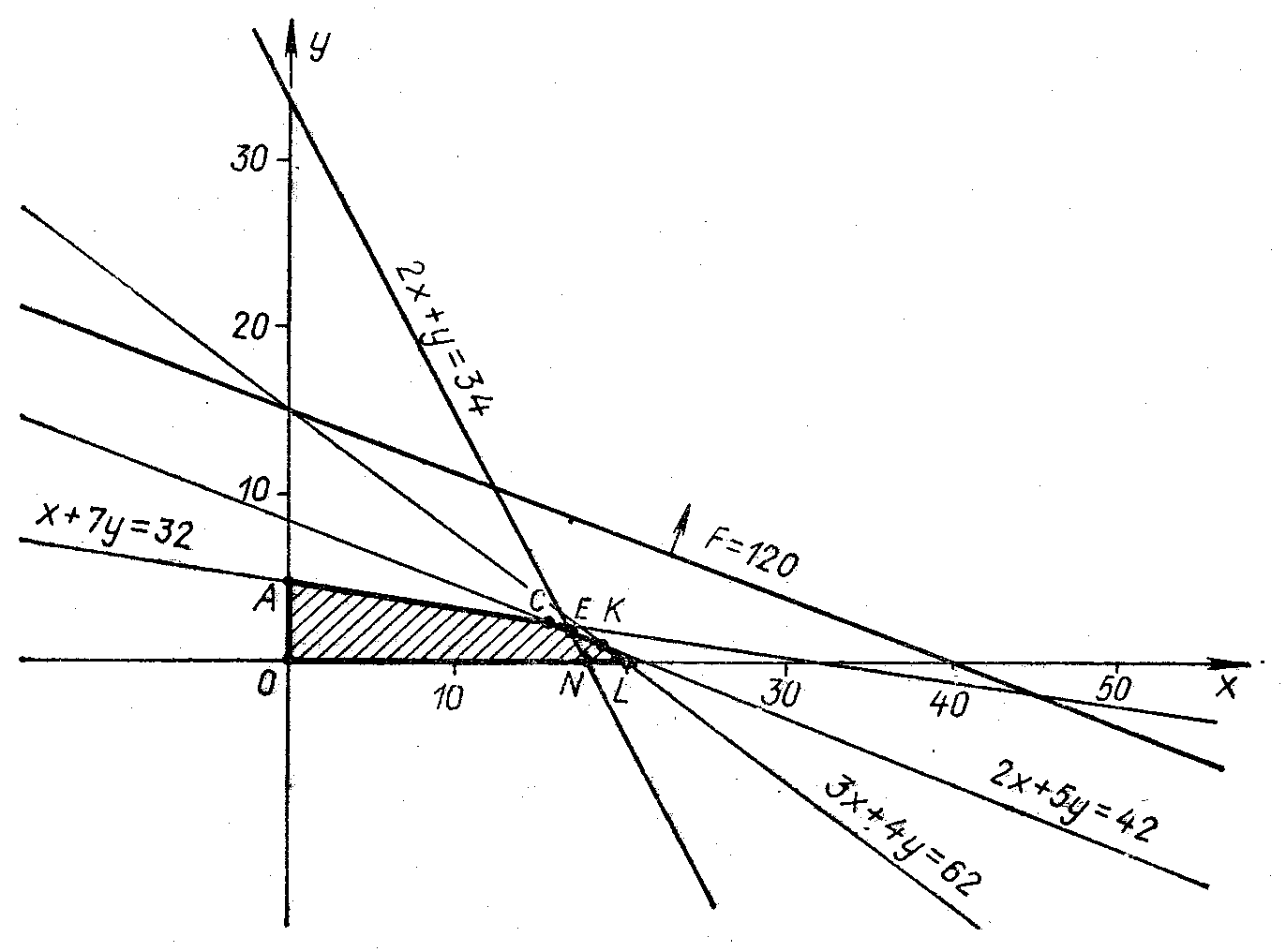
Рис. 7.3.1. Графічний розв’язок задачі