

2.4.2. Электрические преобразователи дистанционной передачи показаний
Потенциометрическая система передачи показаний представлена на рис. 2.8. Потенциометр R1 расположен в первичном преобразователе, а потенциометр R2, электронный усилитель и реверсивный двигатель РД – в измерительном приборе. Движок потенциометра R1 перемещается под воздействием измеряемой величины, а движок потенциометра – под воздействием РД. Если оба движка находятся в одинаковых положениях, то напряжение на входе усилителя U = 0 и двигатель не вращается. Если под воздействием измеряемого параметра движок R1 смещается, то появляется рассогласование U, которое приводит в движение двигатель для устранения рассогласования.
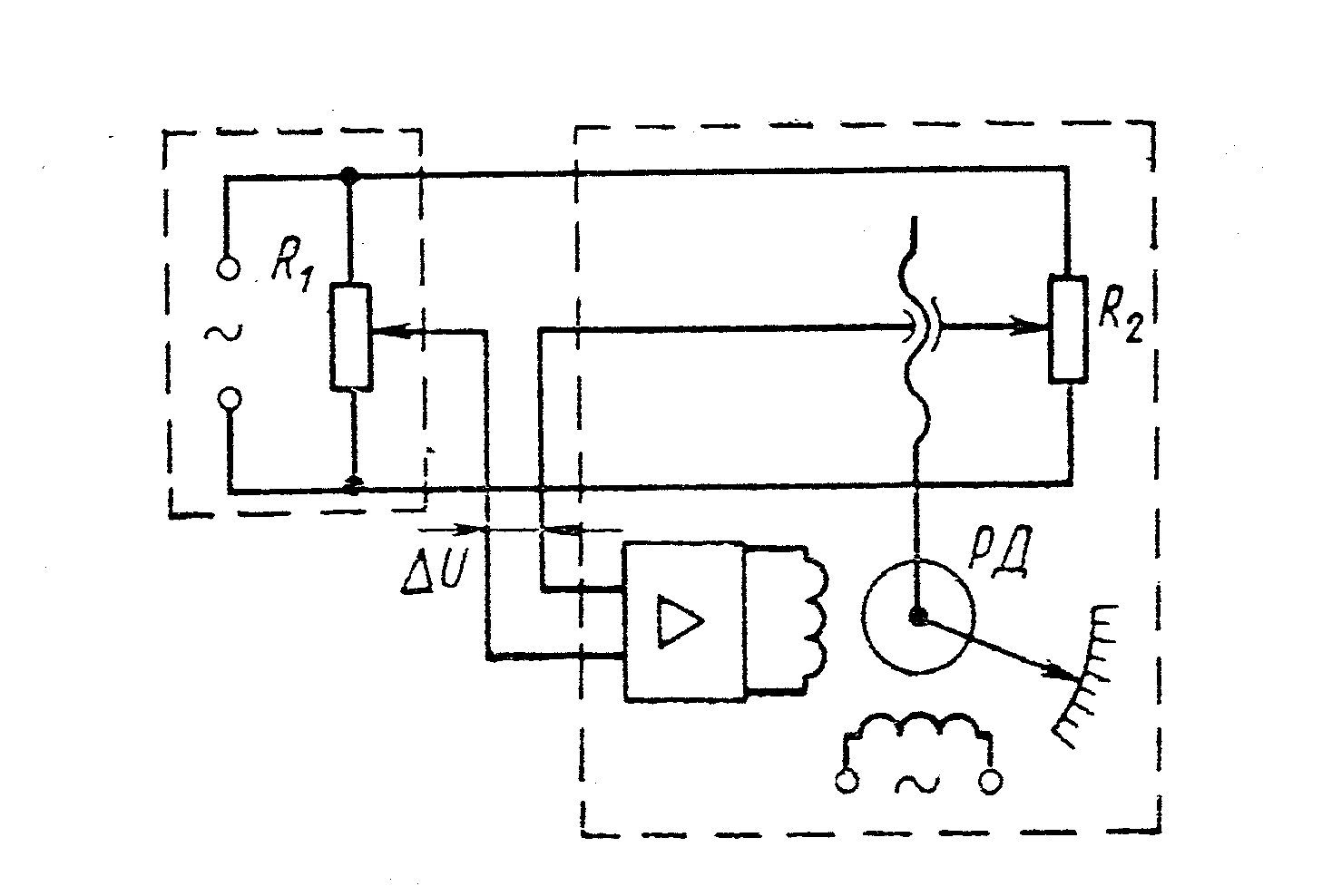
Рисунок 2.8 Потенциометрическая система передачи показаний
Дифференциально-трансформаторная система передачи показаний показана на рис. 2.9. Эта система, также как и потенциометрическая, является компенсационной, т.е. такой, где сигнал одного преобразователя компенсируется встречным сигналом другого. Здесь компенсируется разность напряжений, создаваемых в первичной А и вторичной Б катушках. Первичные обмотки 2 и 9 обеих катушек включены последовательно к источнику переменного напряжения U. Вторичные обмотки (по две в каждой катушке) включены встречно ко входу усилителя 5. Под воздействием измеряемой величины происходит перемещение сердечника 3 катушки А, что приводит к разнице в э.д.с. наводимых в обеих половинах вторичной обмотки 4.
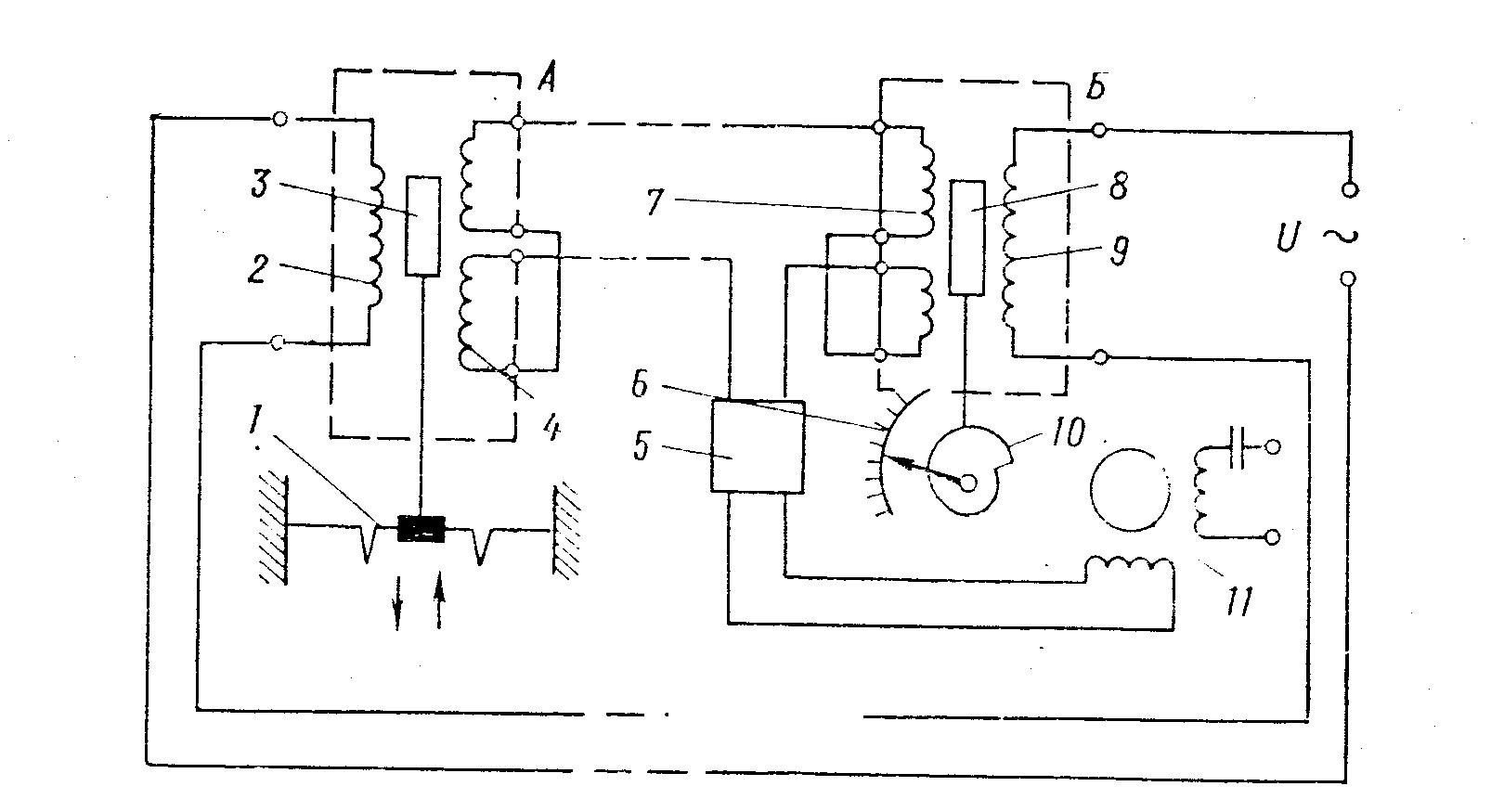
Рисунок 2.9 Дифференциально-трансформаторная система
передачи показаний
Величина разбаланса напряжений U поступает на вход усилителя, вызывая вращение двигателя в сторону уменьшения разбаланса. Поэтому положение сердечника 8 вторичной катушки Б будет в установившемся режиме соответствовать положению сердечника 3 первичной катушки А. Стрелка 6, связанная механически с осью двигателя, будет показывать значение измеряемой величины. Рассмотренная система обеспечивает возможность передачи сигналов измерения до 250м без появления дополнительной погрешности.
Ферродинамическая система передачи показаний показана на рис. 2.10. Преобразователь ПФ1 расположен в первичном измерительном преобразователе, например манометре, и его рамка с током может поворачиваться при изгибе мембраны манометра. Преобразователь ПФ2 расположен во вторичном приборе и его рамка поворачивается реверсивным двигателем РД. Обмотки рамок включены последовательно противофазно. Если положение рамок одинаковы (1 = 2), то Е1 = Е2, Е = 0 и двигатель не вращается. Если под действием измеряемого давления Р рамка преобразователя ПФ1 повернется, то на входе усилителя появится сигнал разбаланса Е, который приведет в движение двигатель для устранения возникшего рассогласования в положении рамок преобразователей.

Рисунок 2.10 Ферродинамическая система передачи показаний
Индукционная система (рис. 2.11) представляет собой самоуравновешивающийся мост переменного тока, состоящий из двух пар индукционных катушек с ферромагнитными сердечниками. Одна пара катушек 1, 2 установлена в передающей части преобразователя, а вторая пара 4, 5 – в приемной. Внутри катушек 1, 2 находится подвижный сердечник 3, механически связанный с чувствительным элементом первичного преобразователя. Внутри катушек 4, 5 находится сердечник 6, связанный с подвижной частью вторичного прибора. В момент равновесия потенциалы средних точек обеих катушек равны. Условием равновесия моста является равенство отношений полных сопротивлений плеч:
![]()
Здесь Z
– полное сопротивление Z
=
![]() ,
где Rа
– активное сопротивление катушки, а х
– ее индуктивное сопротивление.
,
где Rа
– активное сопротивление катушки, а х
– ее индуктивное сопротивление.
х = (L + М),
где = 2f – угловая частота питающего напряжения, L – индуктивность, а М – взаимоиндуктивность.
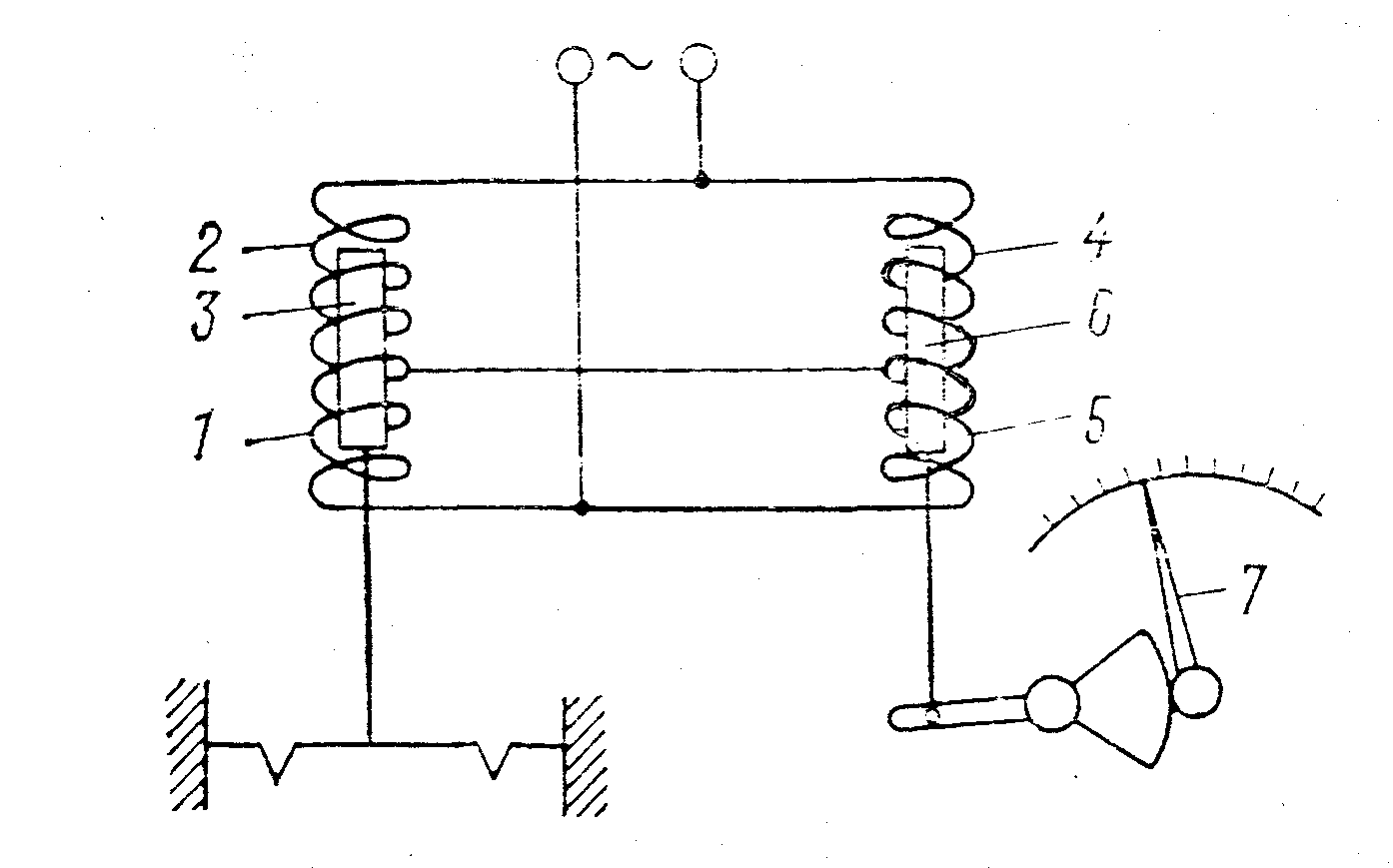
Рисунок 2.11 Индукционная система передачи данных
При изменении положения сердечника 3 под влиянием измеряемой величины нарушится равновесие моста, в диагонали моста появится уравновешивающий ток и появится усилие, втягивающее сердечник 6. таким образом, сердечники 3 и 6 будут работать в следящем режиме, а стрелка 7 вторичного прибора покажет значение измеряемой величины.
Сельсинная система (рис. 2.12) представляет собой индукционную самосинхронизирующуюся систему переменного тока, предназначенную для передачи больших угловых перемещений. Состоит из сельсина-датчика СД и сельсина-приемника СП, у которых выводы трехфазных обмоток ротора соединены между собой, а однофазные обмотки возбуждения запитываются от одного напряжения переменного тока. В этой системе ротор сельсина-приемника поворачивается синхронно с ротором сельсина-датчика.
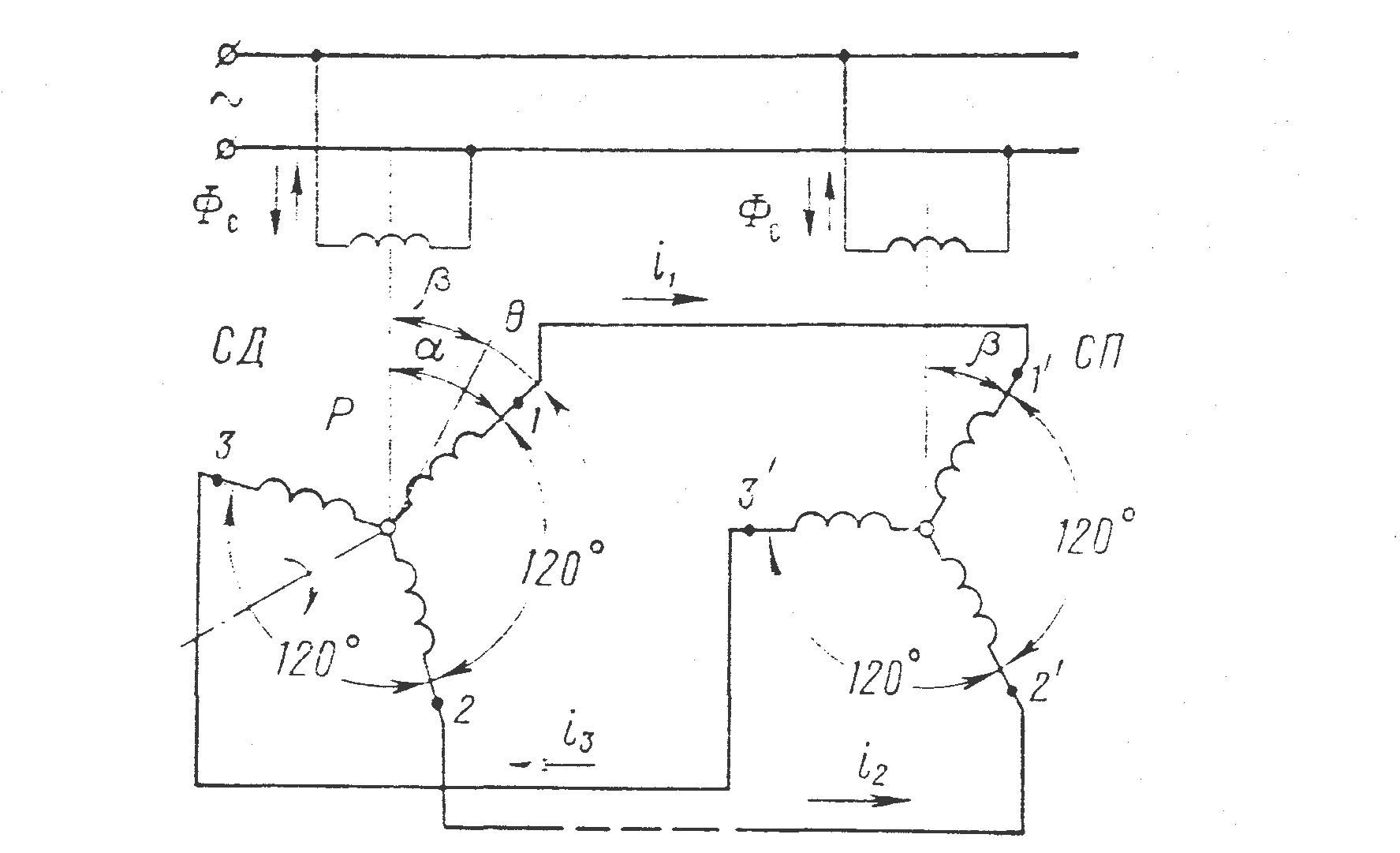
Рисунок 2.12 Сельсинная система передачи показаний