

4.3. Перевод обозначений элементов оборудования и принципиальной электрической схемы на лицевой панели приборного блока (рис. 4.1.)
POWER |
Энергия |
ТHYRISTORIZED DC DRIVE |
Тиристорный привод постоянного тока |
TEST MOTOR |
Исследуемый двигатель |
ARMATURE VOLTAGE |
Напряжение якоря |
ARMATURECURRENT |
Ток якоря |
BRAKE MOTOR |
Нагрузочный двигатель |
HAND CONTROL |
Ручное управление |
SPEED, rad/s |
Скорость, рад/с |
REFERENCE VOLTAGE |
Опорное напряжение |
BRAKE MOTOR COTROL |
Управление нагрузочным двигателем |
LOGIC UNIT |
Блок логики |
ON |
Включено |
OFF |
Выключено |
CMPT |
Компьютер |
4.4. Статические характеристики и режимы работы системы тиристорный преобразователь (тп) – двигатель постоянного тока независимого возбуждения (дпт)
Для питания электродвигателей постоянного тока от сетей переменного тока необходимы преобразовательные устройства. В современной технике широкое применение получили управляемые вентильные (тиристорные) преобразователи, с помощью которых осуществляется преобразование энергии переменного тока в энергию постоянного тока и обратное преобразование. Регулирование напряжения осуществляется путем изменения длительности работы вентиля (тиристора) в проводящую часть периода, характеризуемое углом запаздывания открывания , который отсчитывается от точки естественного открывания. Среднее значение выпрямленной ЭДС Ed в режиме непрерывных токов определяется следующим образом:
![]() , (4.1)
, (4.1)
где Ed0 – максимальная величина выпрямленной ЭДС, соответствующая отсутствию запаздывания открывания вентилей (=0), равная
![]() , (4.2)
, (4.2)
где mв – число пульсаций в периоде: mв=m – для трехфазной нулевой схемы; mв=2m – для трехфазной мостовой схемы; m – число фаз преобразователя; E2фмакс, E2ф – амплитудное и действующее значение фазной ЭДС вторичной обмотки трансформатора.
Среднее значение напряжения и тока вентильного преобразователя определяются его параметрами и схемой соединения. Поэтому выражение (4.1) для среднего значения выпрямленной ЭДС можно записать:
![]() , (4.3)
, (4.3)
где kcx – коэффициент, зависящий от схемы тиристорного преобразователя.
На практике в основном используются схемы с нулевым выводом, в которых используется лишь одна полуволна переменного тока, и мостовые схемы, в которых используются обе полуволны переменного тока. Соответственно, kcx коэффициент для этих схем будет:
kcx =2,34 – трехфазная мостовая схема; kcx=1,17 – трехфазная нулевая схема.
При питании якоря двигателя постоянного тока от вентильного преобразователя эквивалентную схему замещения цепи выпрямленного тока можно представить в следующем виде:
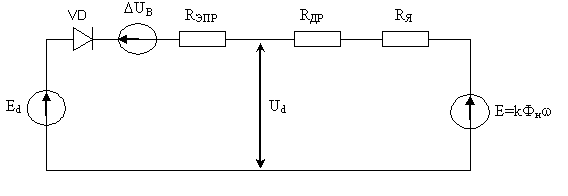
Рис. 4.2. Схема замещения цепи выпрямленного тока
В соответствии с законом Кирхгофа для приведенной схемы может быть записано следующее уравнение:
![]() , (4.4)
, (4.4)
где RЭПР – эквивалентное активное сопротивление преобразователя:
![]() ,
,
где RT и xT – соответственно активное и индуктивное сопротивления фазы трансформатора; RДР – активное сопротивление сглаживающего дросселя.
Согласно выражения (4.4) уравнения электромеханической и механической характеристик системы тиристорный преобразователь – двигатель имеют вид:
 , (4.5)
, (4.5)
 , (4.6)
, (4.6)
где
![]() .
.
Приведенные уравнения получены в предположении непрерывности тока якоря ДПТ. Однако, при уменьшении нагрузки имеет место режим прерывистых токов , который искажает линейность механических характеристик . Данный режим обуславливается тем , что энергии, запасенной в индуктивностях якорной цепи ДПТ оказывается недостаточно для поддержки тока при отрицательных напряжениях на аноде тиристоров , что приводит к увеличению выпрямленного напряжения Ud, а, следовательно, к возрастанию угловой скорости вращения ДПТ.
Электромеханические (механические) характеристики трехфазного тиристорного нереверсивного мостового электропривода приведены на рис. 4.3. , толстым контуром выделен режим гранично-непрерывного тока, слева от которого имеет место режим прерывистых токов, а справа – режим непрерывных токов. Видно, что регулируя угол задержки открытия тиристоров, можно получить семейство параллельных в режиме непрерывных токов линейных характеристик.
Данный привод допускает работу в 1 и 4 квадрантах. Электрическая машина может работать как в двигательном режиме (зона, ограниченная на рис. 4.3 осями координат и характеристикой), при =0, так и в тормозных режимах: противовключения, рекуперации, динамического торможения – характеристика при =/2.

Рис. 4.3. Электромеханические (механические) характеристики
в системе ТП-ДПТ
Разомкнутые системы регулирования скорости вращения нашли применение лишь в относительно дешевых электроприводах, не требующих высокой точности регулирования. Этот тип приводов с высокомоментными двигателями целесообразно использовать в замкнутых системах регулирования. Наибольшее применение в комплектных электроприводах нашел принцип подчиненного регулирования с двумя контурами регулирования (контур тока и контур скорости). Подчиненное регулирование основано на том, что внешний контур вырабатывает сигнал задания для внутреннего контура. Внутренний контур является звеном внешнего контура, и его параметры учитываются при оптимизации последнего.