

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Государственное образовательное учреждение высшего профессионального образования
«ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
_________________________________________________________
Ю. Н. Дементьев, С. М. Семенов, Ю. С. Боровиков
Лабораторный практикум
к выполнению лабораторных работ по курсам электропривода и электрооборудования для студентов бакалаврского и инженерного уровней всех форм обучения
Издательство ТПУ
Томск 2004
УДК 621.83
Л 12
Л 12 Лабораторный практикум к выполнению лабораторных работ по курсам электропривода и электрооборудования для студентов бакалаврского и инженерного уровней всех форм обучения/Сост.: Ю. Н. Дементьев, С. М. Семенов, Ю. С. Боровиков. – Томск: Изд-во ТПУ, 2004. – 91с.
В лабораторном практикуме приведены описания шести лабораторных работ, посвященных исследованию статических и динамических режимов электроприводов постоянного и переменного тока.
Все работы выполнены в едином стиле. Четко и доходчиво поставлены цели и задачи, решаемые в описании. Кратко изложены теоретические сведения по тематике и программа выполняемых работ. Имеются технические параметры электрических машин и систем электроприводов. Содержится перечень вопросов для самопроверки и список рекомендуемой для подготовки литературы.
Пособие предназначено для студентов всех форм обучения по курсам «Электрический привод» и «Автоматизированный электропривод».
УДК 621.83
Рекомендовано к печати Редакционно-издательским советом Томского политехнического университета
Рецензенты
Кандидат технических наук, доцент ТУСУР
А. П. Зайцев
Кандидат технических наук, доцент, зав. каф. ЭПА СТТИ
С. Н. Кладиев
* Авторы выражают благодарность Филимоновой Ирине Владимировне за большой вклад в создание данного лабораторного практикума
© Томский политехнический университет, 2004
© Оформление. Издательство ТПУ, 2004

Лабораторная работа №1 статиЧеские характеристики и режиМы работы электропривода с электродвигателем постоЯнного тока независимого возбуждениЯ
1.1. Цель работы
Исследования электромеханических
![]() и механических
и механических
![]() характеристик при различных режимах
работы и способах регулирования скорости
электропривода с двигателем постоянного
тока независимого возбуждения.
характеристик при различных режимах
работы и способах регулирования скорости
электропривода с двигателем постоянного
тока независимого возбуждения.
1.2. Оборудование стенда
Лабораторный стенд состоит из приборного блока и электромеханического агрегата на базе двух одинаковых механически связанных двигателей постоянного тока независимого возбуждения.
Агрегат и блок соединены между собой двумя силовыми кабелями и одним измерительным.
Технические данные исследуемого (М1) и нагрузочного (М2) двигателей независимого возбуждения (ДНВ, на рис. 1.1):
тип Д-200;
Рн=200 Вт;
Uн=27 В;
Iн=10 А;
nн=275010 % об/мин;
Мн=0,69 Нм;
ηн=63%;
режим работы S1.
Сопротивление обмотки якоря ДНВ при
![]() ,
,
![]() Ом,
Ом,
Сопротивление обмотки якоря ДНВ при
![]() ,
,
![]() ,
,
где 0,004 – температурный коэффициент сопротивления меди.
Сопротивление обмотки возбуждения при
![]() ,
,![]() Ом.
Ом.

1.3. Перевод обозначений элементов оборудования и принципиальной электрической схемы на лицевой панели приборного блока (рис. 1.1)
POWER |
Энергия |
SUPPLY VOLTAGE |
Напряжение питания |
CURRENT SOURCE |
Источник тока |
ARMATURE CURRENT |
Ток якоря |
EXCITING CURRENT |
Ток возбуждения |
STEP VOLTAGE |
Шаговый переключатель напряжения |
POWER SUPPLY |
Источник энергии |
TEST MOTOR |
Исследуемый двигатель |
BRAKE MOTOR |
Нагрузочный двигатель |
TACHOMETER |
Тахометр |
SPEED, rad/s |
Скорость, рад/с |
HAND CONTROL |
Ручное управление |
PHOTOELECTRIC TRANSDUSER |
Фотоэлектрический преобразователь |
CMPT |
Компьютер |
ON |
Включено |
OFF |
Выключено |
SEPARATELY EXCITED MOTOR STUDY |
Двигатель с независимым возбуждением |
1.4. Режимы работы, статические характеристики двигателей постоянного тока независимого возбуждения
Аналитическое выражение электромеханических =f(I) и механических =f(M) характеристик ДНВ:
![]() ;
;
![]() ,
,
![]()
где знак ”+” соответствует режиму
рекуперативного (генераторного)
торможения, а знак “”
режимам двигательному, противовключения
и динамического торможения; U
напряжение
питания двигателя; I
ток якоря двигателя;
R
сопротивление якорной цепи, состоящее
в общем случае из сопротивлений
добавочного резистора RД
и якоря
![]() ;
;
![]() ,
,
![]() ,
,
![]() ,
сопротивления
соответственно обмотки якоря,
дополнительных полюсов и компенсационной
обмотки; М
электромагнитный момент двигателя; кФ
соответственно
конструктивный коэффициент и магнитный
поток двигателя; С
коэффициент связи двигателя;
,
сопротивления
соответственно обмотки якоря,
дополнительных полюсов и компенсационной
обмотки; М
электромагнитный момент двигателя; кФ
соответственно
конструктивный коэффициент и магнитный
поток двигателя; С
коэффициент связи двигателя;
![]() скорость идеального
холостого хода;
скорость идеального
холостого хода;![]() падение скорости
относительно скорости
при изменении нагрузки от нуля до
заданного значения.
падение скорости
относительно скорости
при изменении нагрузки от нуля до
заданного значения.
Возможные режимы работы электродвигателя:
двигательный режим (характеристика 1-2, рис. 1.2.);
режим рекуперативного (генераторного) торможения (характеристика 2-3);
режим торможения противовключением при сохранении полярности питающего напряжения и наличии активной нагрузки (характеристика 1-4);
режим динамического торможения с независимым возбуждением (характеристика 0-5).
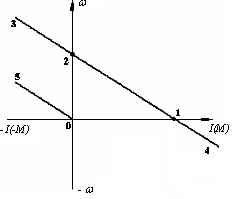
Рис. 1.2. Электромеханические и механические характеристики
электропривода с ДПТ НВ
Скорость вращения в электроприводе с
ДПТ независимого возбуждения регулируют
изменением питающего напряжения U,
включением в якорную цепь добавочного
сопротивления![]() ,
изменением магнитного потока Ф. На
рис. 1.3, показаны естественная характеристика
и искусственные характеристики при
указанных способах регулирования.
,
изменением магнитного потока Ф. На
рис. 1.3, показаны естественная характеристика
и искусственные характеристики при
указанных способах регулирования.
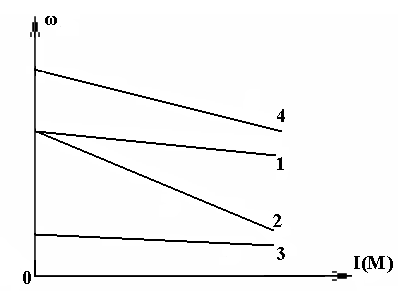
Рис. 1.3. Естественная и искусственные электромеханические и
механические характеристики ДПТ НВ:
1 естественная (U=UН; Ф=ФН; RД=0);
2 искусственная (RД0);
3 искусственная (U<UН);
4 искусственная (Ф<ФН)