

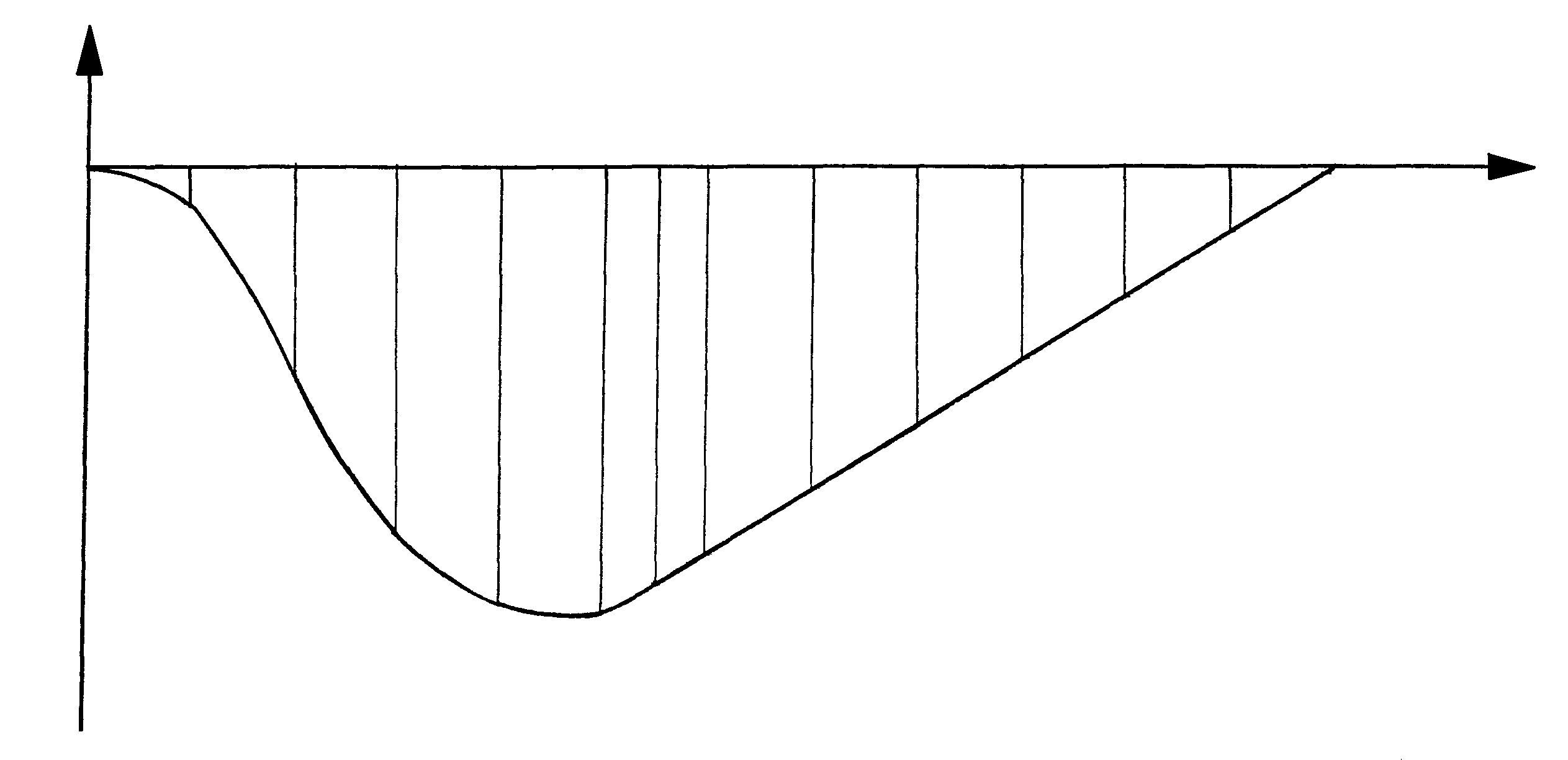
Построение диаграммы приращения кинетической энергии.
Приращение кинетической энергии равно:
ΔЕ =Адв - Апс, Дж.
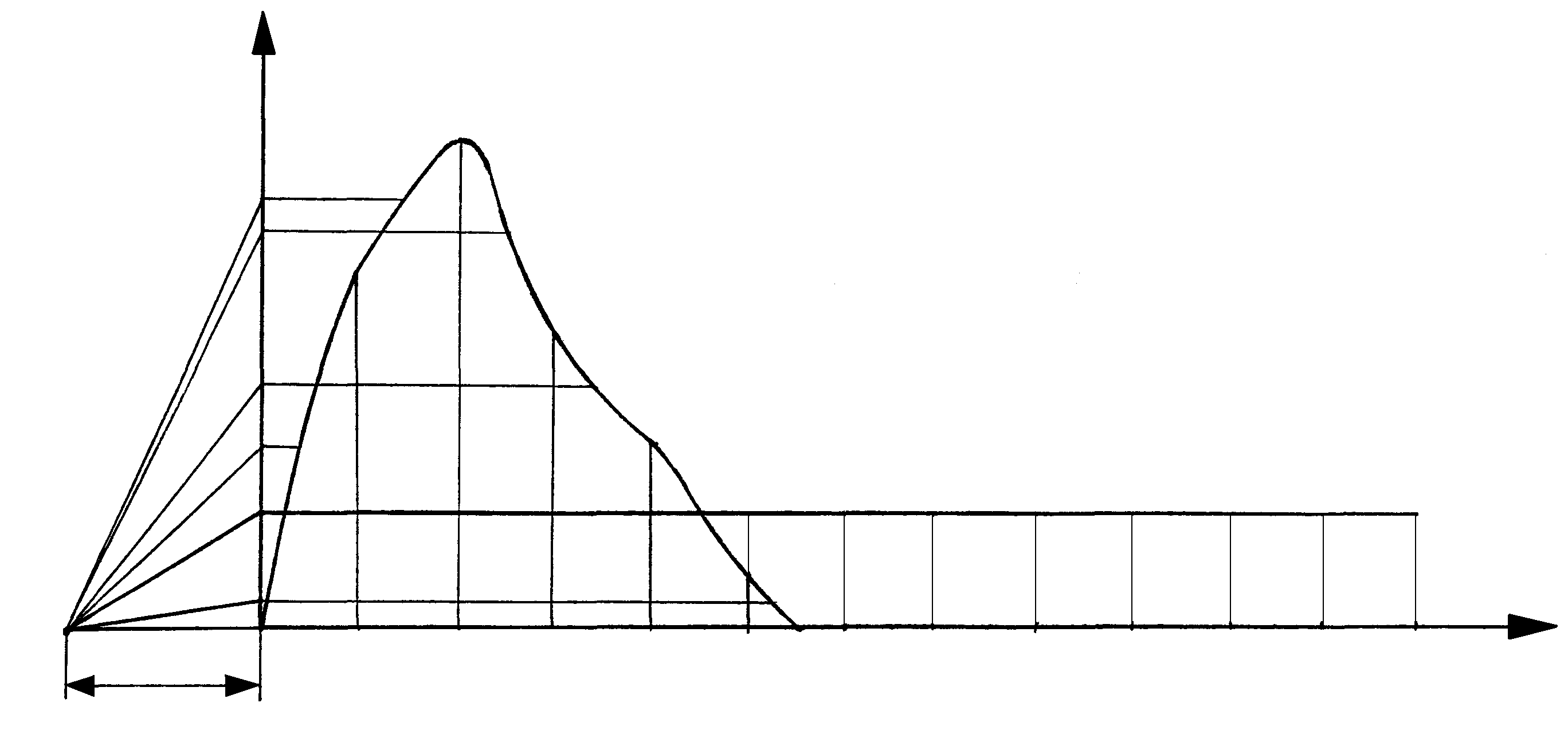
Данная диаграмма строится графическим вычитанием из ординат кривой изменения движущих сил ординат диаграммы работ сил полезного сопротивления (рис.3.5).
уΔЕ1=уАдв1 - уАпс1, мм;
уΔЕ1=12-29= -17 мм.

A
Aдв
0 1 2 3 4 5 0` 6 7 8 9 10 11 12
Рис. 3.3 Кривая изменения работы движущих сил на диаграмме работ сил полезного сопротивления
 M
M
Mдв
H=4 0 1 2 3 4 5 0` 6 7 8 9 10 11 12
Рис. 3.4 Кривая изменения момента движущих сил на диаграмме моментов
![]() 0 1 2 3 4 5 0` 6 7 8
9 10 11 12
0 1 2 3 4 5 0` 6 7 8
9 10 11 12
Рис. 3.5 Диаграмма приращения кинетической энергии.
Подставляя соответствующие значения уАдв и уАпс для других положений, получим:
уΔЕ2=24-76= -52 мм; уΔЕ3=34-108= -74 мм;
уΔЕ4=44-124= -80 мм; уΔЕ5=55-129= -74 мм;
уΔЕ6=65-130= -65 мм; уΔЕ7=75-130= -55 мм;
уΔЕ8=86-130= -44 мм; уΔЕ9=97-130= -33 мм;
уΔЕ10=108-130= -22 мм; уΔЕ11=119-130= -11 мм;
уΔЕ0,12=0.
Находим масштаб оси ординат данной диаграммы.
![]()
![]() ,
,
где
![]() ,
,
![]() - ординаты в мм на диаграмме работ и
приращения кинетической энергии;
- ординаты в мм на диаграмме работ и
приращения кинетической энергии;
![]() - масштаб диаграммы работ.
- масштаб диаграммы работ.
Возьмем данные ординаты для второго положения:
![]()
Найдем значения приращений кинетической энергии для всех положений.
![]() ,
,
где - ордината в мм на диаграмме приращения кинетической энергии;
![]() -
масштаб оси ординат данной диаграммы.
-
масштаб оси ординат данной диаграммы.
ΔЕ0,12 = 0;
3.6 Построение диаграммы приведенного момента инерции Iпр= Iпр().
Значение приведенного момента можно вычислить по формуле:

где
![]() - момент инерции звена относительно
центра масс;
- момент инерции звена относительно
центра масс;
![]() - масса i-го звена;
- масса i-го звена;
![]() - скорость центра масс i-го
звена;
- скорость центра масс i-го
звена;
ωi – угловая скорость i-го звена;
ωпр – угловая скорость звена приведения.
Преобразуя данную формулу для имеющегося механизма, получим:
 ,
или
,
или
![]() ,
,
где
![]() - скорость точки С.
- скорость точки С.
Находим значение приведенного момента инерции для первого положения:
![]()
Подставляя в данную формулу соответствующие для каждого положения величины, получим:
Iпр2=10,2
![]() ;
Iпр3=12,7
;
;
Iпр3=12,7
;
Iпр4=10,6 ; Iпр5=11,8 ;
Iпр6=11,7 ; Iпр7=9,36 ;
Iпр8=6,1 ; Iпр9=0,7 ;
Iпр10=5,5 ; Iпр11=5,6 ;
Iпр0,12,![]() =0.
=0.
Находим масштаб оси ординат диаграммы приведенного момента инерции:
![]()
где
![]() -
максимальное значение приведенного
момента инерции;
-
максимальное значение приведенного
момента инерции;
- максимальная ордината в мм на диаграмме. Выбирается произвольно.
![]()
Находим ординаты, соответствующие значениям приведенных моментов инерции для всех положений:
![]()

3.7 Построение диаграммы энергомасс, ΔЕ=f(Iпр).
Построение данной диаграммы (рис.3.7) осуществляется методом профессора Виттенбауэра. Данная диаграмма строится по 13-ти точкам, полученным при пересечении линий, проведенных из концов ординат, соответствующих одному и тому же положению, диаграмм приращения кинетической энергии и приведенного момента инерции, например, первая точка получается при пересечении линий проведенных из концов ординат двух диаграмм, соответствующих первому положению.