

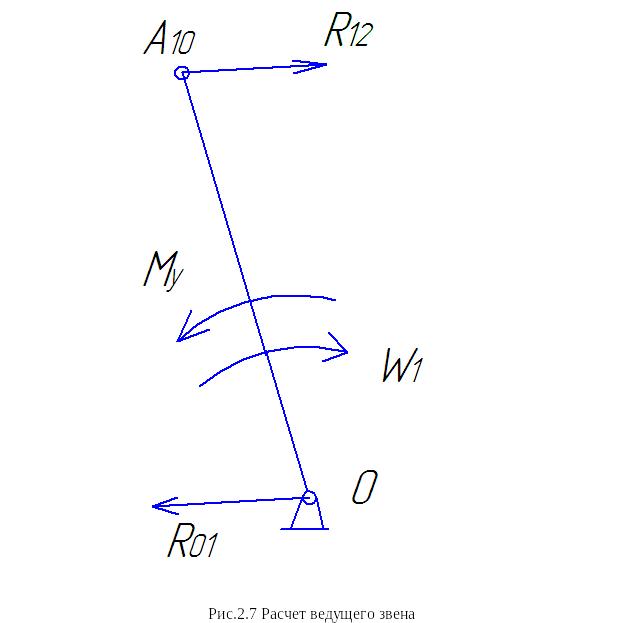
Расчет ведущего звена.
При исследовании механизмов двигателей кривошип условно принимают за начальное звено, и реакция в начальном вращательном механизме зависит от способа передачи энергии кривошипом рабочему звену.(Рис.2.7)
Составим сумму моментов всех сил, действующих на ведущее звено.
![]()
![]()
где, R21 – реакция действия звена 2 на звено 1.
![]() - плечо соответствующей реакции.
- плечо соответствующей реакции.
Му – уравновешивающий момент.
Выразим из уравнения Му и подставим соответствующие значения.
![]()
Составим сумму всех сил действующих на ведущее звено и найдем R21
![]()
![]()
![]()
![]()
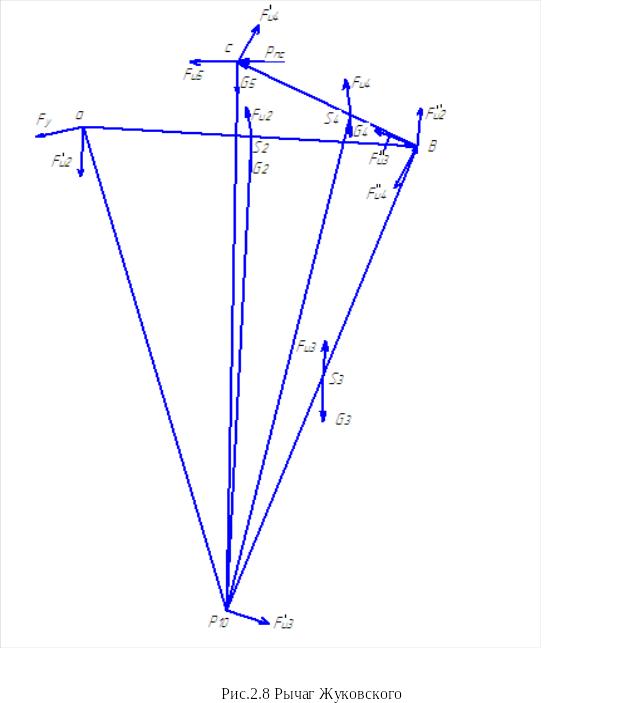
2.7 Построение рычага Жуковского для нахождения уравновешивающей силы.
В произвольном масштабе строим повернутый на 90 план скоростей для десятого положения механизма. На этот план как на жесткий рычаг (рычаг Жуковского) наносим все Gi, Pпс, Fиi, а Миi - заменяем парой сил. (Рис.2.8)
Момент
сил инерции Ми2 заменяем парой
сил
![]() ,
,![]() .
.
=![]() ,Н,
,Н,
где lАВ – истинная длина звена АВ в м.
=![]() Н.
Н.
Данная пара сил приложена к точкам А и В звена АВ в направлении действия Ми2.
Момент
сил инерции Ми3 заменяем парой
сил
![]() ,
,![]() .
.
=![]() ,Н,
,Н,
где lВО3 – истинная длина звена ВО3 в м.
=![]() Н.
Н.
Данная пара сил приложена к точкам В и О3 звена ВО3 в направлении действия Ми3.
Момент
сил инерции Ми4 заменяем парой
сил
![]() ,
,![]() .
.
=![]() ,Н,
,Н,
где lCВ – истинная длина звена CВ в м.
=![]() Н.
Н.
Данная пара сил приложена к точкам C и В звена CВ в направлении действия Ми4.
Для того, чтобы рычаг Жуковского находился
в равновесии, необходимо приложить
уравновешивающую силу
![]() перпендикулярно звену ОА или отрезку
перпендикулярно звену ОА или отрезку
 Ра
Ра
на рычаге в точке а. Составим сумму моментов всех сил, приложенных к рычагу Жуковского относительно полюса Р, ΣМР(Fi)=0
Положительное направление сил выбираем против хода часовой стрелки.
![]()
Находим
из последнего уравнения
![]() :
:
![]() F’y=1794,43
H
F’y=1794,43
H
Для определения уравновешивающего момента используем формулу:
![]()
где - уравновешивающая сила;
lОА – истинная длина звена ОА в м.
![]()
2.8 Определение погрешности по моменту.
Погрешность по моменту определяем по формуле:
![]() %,
%,
где Му – уравновешивающий момент, полученный с помощью структурного анализа механизма;
![]() - уравновешивающий момент, полученный
с помощью рычага Жуковского.
- уравновешивающий момент, полученный
с помощью рычага Жуковского.
![]() %
= 2,62%.
%
= 2,62%.
3. Расчет маховика
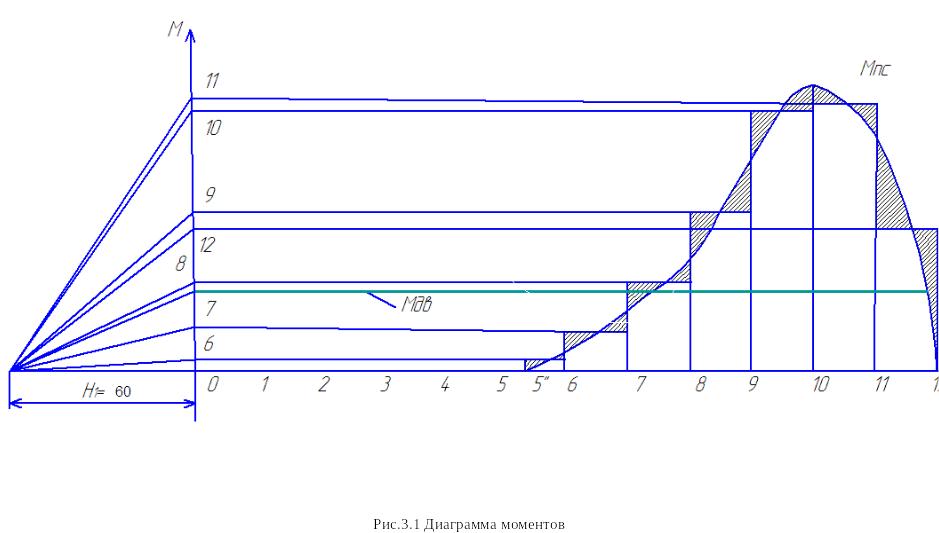
3.1 Построение диаграммы зависимости момента сил полезного сопротивления от угла поворота ведущего звена, Мпс= Мпс().
Для построения диаграммы (рис.3.1) ось абсцисс разбиваем на 12 равных частей. Масштаб оси абсцисс определяется по формуле:
=
где l0-12 –расстояние на диаграмме, характеризующее один полный оборот кривошипа. Примем l0-12 =240 мм, тогда
=![]()
Момент сил полезного сопротивления Мпс определяют по формуле:
![]()
где Fi и Mi – внешняя сила и момент, приложенные к звеньям механизма;
Vi – скорость той точки, к которой приложена сила Fi;
αi – угол между направлением силы Fi и скорости Vi;
ωi – угловая скорость того звена, к которому приложен момент Mi;
ωпр – угловая скорость звена приведения.
В данном случае получили
![]()
где Рпс – сила полезного сопротивления;
Vс – скорость точки С;
ω2 – угловая скорость звена ОА.
Для положений 0-5,12 Мпс= 0. Для шестого положения:
![]()
![]()
Подставляя соответствующие для каждого положения Рпс и VС, получим:
![]()
![]()
![]()
![]()
![]()
Значения моментов сил полезного сопротивления заносим в таблицу 3.1.
Определяем масштаб оси ординат диаграммы моментов:
![]()
где
![]() - максимальное значение момента из
таблицы 3.1 в
- максимальное значение момента из
таблицы 3.1 в
![]()
![]() -
максимальная ордината в мм на диаграмме
моментов. Выбирается произвольно. Примем
=92,75
мм, тогда
-
максимальная ордината в мм на диаграмме
моментов. Выбирается произвольно. Примем
=92,75
мм, тогда
![]()
Определяем ординаты для остальных положений, характеризующие значения моментов сил полезного сопротивления в этих положениях:
![]()
где
![]() - значение момента в шестом положении;
- значение момента в шестом положении;
![]() - масштаб оси ординат диаграммы моментов.
- масштаб оси ординат диаграммы моментов.
![]()
Подставляя соответствующие значения Мпс для других рабочих положений в последнюю формулу, получим:
![]()
![]()
![]()
![]()
![]()
![]()
Таблица 3.1
Значения моментов сил полезного сопротивления.
Полож. механ.
Параметр |
0, 12 |
1 |
2 |
3 |
4 |
5 |
5’ |
6 |
7 |
8 |
9 |
10 |
11 |
1, 1/с |
7,53 |
7,53 |
7,53 |
7,53 |
7,53 |
7,53 |
7,53 |
7,53 |
7,53 |
7,53 |
7,53 |
7,53 |
7,53 |
VС, м/с |
0 |
1,95 |
2,26 |
1,01 |
0,46 |
0,15 |
0 |
0,12 |
0,39 |
0,7 |
1,28 |
1,75 |
1,4 |
Pпс, Н |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1600 |
1600 |
1600 |
1600 |
1600 |
1600 |
Мпс, Нм |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
25 |
83 |
148 |
271 |
371 |
297 |
3.2 Построение диаграммы зависимости работ сил полезного сопротивления от угла поворота ведущего звена, Апс= Апс().
Масштаб оси ординат данной диаграммы определяем по формуле:
![]()
где Н1 – полюсное расстояние в мм, Н1=60 мм;
- масштаб оси ординат диаграммы моментов;
![]() -
масштаб оси абсцисс, равный для всех
четырех диаграмм.
-
масштаб оси абсцисс, равный для всех
четырех диаграмм.
![]()
Построение осуществляем методом графического интегрирования (рис.3.2). Для построения диаграммы ось ох разбиваем на интервалы, количество и величина которых должна совпадает с интервалами, построенными на диаграмме моментов. Также по оси ох в сторону отрицательных значений откладываем расстояние Н1 – полюсное расстояние в мм. Выбирается произвольно. Получаем точку Р1 (примем Н1=60 мм).
Далее осуществляем следующие действия:
а) На диаграмме моментов вдоль оси ох проводим линию так, чтобы внешняя площадь (не являющаяся частью площади диаграммы) ниже проведенной линии приблизительно была равна внутренней площади диаграммы, находящейся выше проведенной линии (рис.3.2).
б) Проводим эту линию до пересечения с осью ординат и соединяем с точкой Р1.
Соединяем полученные прямые плавными линиями и получаем диаграмму.
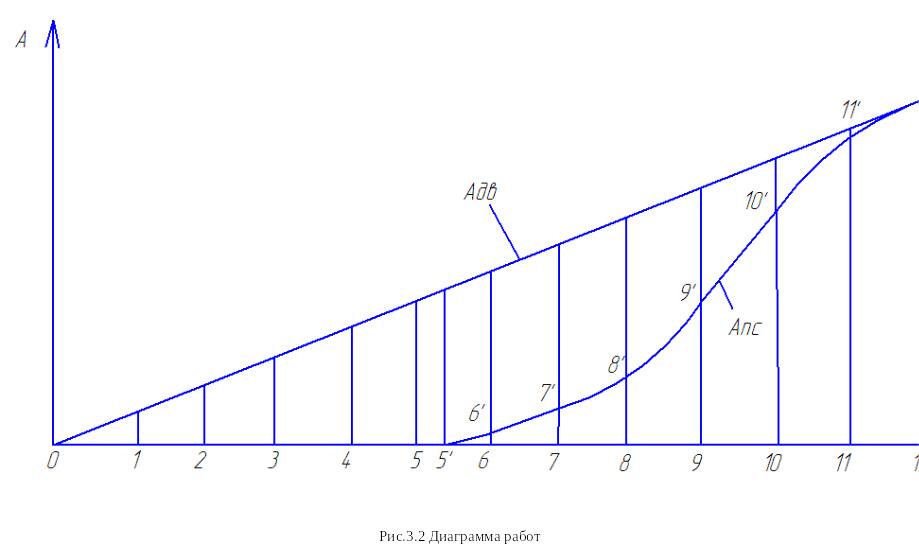
3.3 Построение кривой изменения работы движущих сил на диаграмме работ полезного сопротивления, Адв= Адв().
Для получения данной кривой (рис.3.2) необходимо конечную точку диаграммы моментов соединить с нулевой точкой (началом координат). Полученная линия – кривая работ движущих сил.
3.4 Построение кривой изменения момента движущих сил на диаграмме моментов, Мдв= Мдв().
Построение данной диаграммы осуществляем методом графического дифференцирования. Для этого нужно из точки Р1 диаграммы моментов провести линию, параллельную кривой работ движущих сил, до пересечения ее с осью ординат. От точки пересечения проводим горизонтальную линию на всем отрезке
l0-12. Получаем кривую изменения момента движущих сил.