2. Силовой расчет механизма
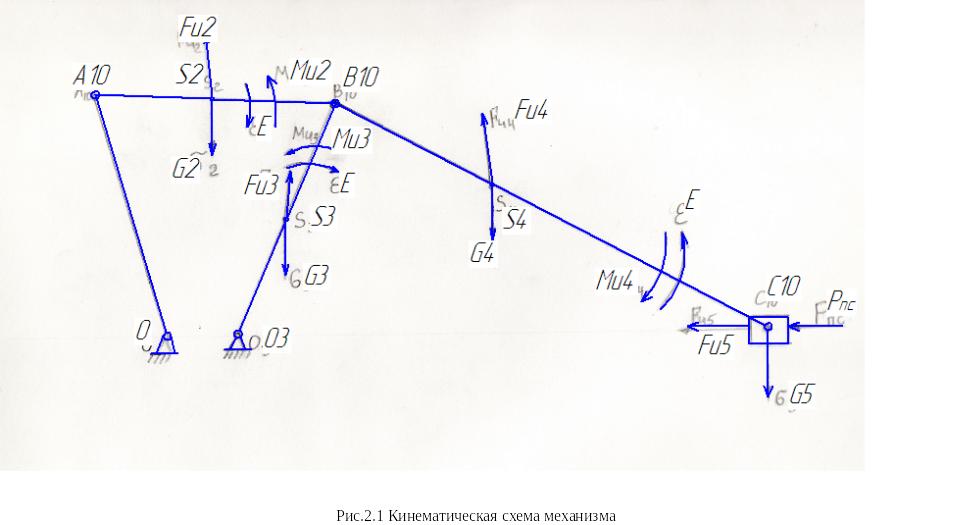
2.1 Вычерчивание кинематической схемы механизма в одном из рабочих положений.
Рабочим называют то положение механизма, в котором сила полезного сопротивления Рпс, приложенная к определенной точке звена, направлена противоположно скорости этой точки (в данном случае Рпс приложена к точке С). Вычертим кинематическую схему механизма в 10-м рабочем положении в масштабе l (рис 2.1). Для каждого звена определяем положение центра масс S (кроме ведущего звена ОА). Т. к. звенья принимаются за однородные стержни, то центры масс этих звеньев находятся посередине каждого из них.
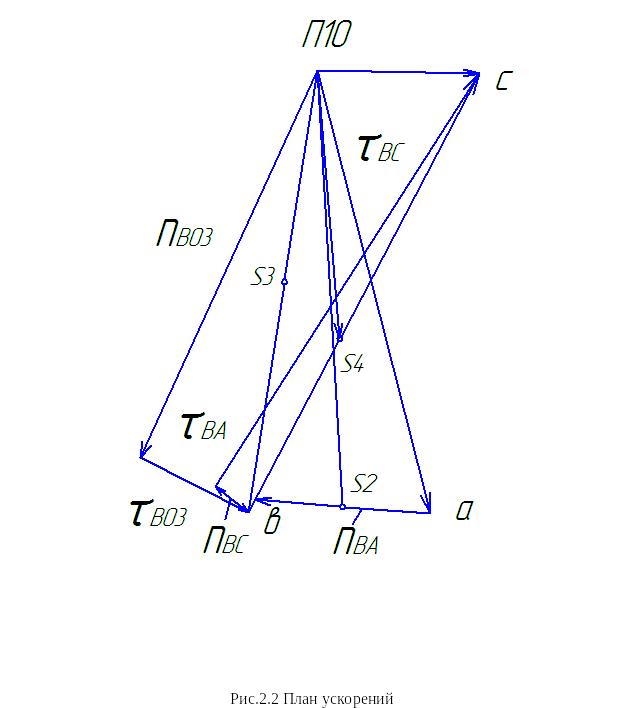
2.2 Построение плана ускорений для заданного положения
План ускорений для заданного положения вычерчивается также как и в п.1.3 для положения 10.(Рис2.2)
2.3 Определение сил полезного сопротивления Pпс, сил моментов инерции Fиi, моментов инерции Миi.
Для нахождения сил инерции осуществляем следующие действия:
Находим
S2, S3, S4
на плане ускорений. Соединяем эти точки
с полюсом . Получаем
векторы
![]() характеризующие
ускорения центров масс звеньев АВ, ВО3
и ВС. На кинематической схеме механизма
в 10-м рабочем положении из точек S2,
S3, S4 проводим
векторы
характеризующие
ускорения центров масс звеньев АВ, ВО3
и ВС. На кинематической схеме механизма
в 10-м рабочем положении из точек S2,
S3, S4 проводим
векторы
![]() сил
инерции, направленные параллельно
векторам
соответственно, но в противоположную
сторону. Из точки С проводим вектор силы
инерции
сил
инерции, направленные параллельно
векторам
соответственно, но в противоположную
сторону. Из точки С проводим вектор силы
инерции
![]() ,
направленный в противоположную сторону
вектора ускорения точки С.
,
направленный в противоположную сторону
вектора ускорения точки С.
Главный вектор сил инерции звена определяется по формуле:
![]()
где
![]() - масса i-го звена;
- масса i-го звена;
![]() - ускорение центра масс i-го
звена.
- ускорение центра масс i-го
звена.
Знак ‘ – ‘ показывает, что сила инерции направлена противоположно ускорению центра масс.
Введем следующие обозначения: звено АВ – 2-е, ВО3 – 3-е, ВС – 4-е, ползун С – 5-е звено.
Для определения значений сил инерции используем формулу:
![]()
Для звена АВ:
![]()
Находим ускорение центра масс звена АВ по формуле:
![]()
где
![]() - отрезок в мм с плана ускорений;
- отрезок в мм с плана ускорений;
- масштаб плана ускорений.
![]()
Найдя ускорение центра масс, находим силу инерции:
![]()
Для звена ВО3:
![]()
![]()
![]()
![]()
Для звена ВС:
![]()
![]()
![]()
![]()
Для ползуна С:
![]()
![]()
![]()
![]()
Главный момент сил инерции находится по формуле:
![]()
где εi – угловое ускорение i-го звена;
Isi-момент инерции i-го звена.
Знак ‘ – ‘ показывает, что момент сил инерции направлен противоположно моменту инерции.
Для определения значений момента сил инерции используем формулу:
![]()
Определяем моменты инерции звеньев относительно центров масс - . Для звена 2, совершающего плоско-параллельное движение, момент инерции определяем по формуле:
![]()
где m2 – масса звена АВ;
![]() -
длина звена АВ в м.
-
длина звена АВ в м.
![]()
Для звена 3, совершающего вращательное движение, момент инерции определяем по формуле:
![]()
где m3 – масса звена ВО3;
![]() - длина звена ВО3 в м.
- длина звена ВО3 в м.
![]()
Для звена 4, совершающего плоско-параллельное движение, применяем формулу:
![]()
где m4 – масса звена ВC;
![]() - длина звена ВC в м.
- длина звена ВC в м.
![]()
Для звеньев 2, 3 и 4 в формулу для нахождения момента сил инерции подставляем найденные значения угловых ускорений и моментов инерции. Получаем соответственно:
![]()
![]()
![]()
Для
определения направления моментов сил
инерции Миi
необходимо определить направления
угловых ускорений εi
каждого звена (кроме ведущего) и направить
Миi в
противоположную сторону направления
εi. Направления
угловых ускорений ε2, ε3, ε4
совпадают с направлениями векторов
,
![]() ,
,![]() соответственно.
Направления моментов сил инерции Ми2,
Ми3, Ми4 противоположно
направлениям
соответственно.
Направления моментов сил инерции Ми2,
Ми3, Ми4 противоположно
направлениям
ε2, ε3, ε4.
Определяем силы полезного сопротивления Рпс.
Силы полезного сопротивления определяем только для рабочих положений 6 - 11. Для 12,0-5 положений Рпс=0.
Сила полезного сопротивления для рабочих положений будет постоянна
Рпс.=1600 Н