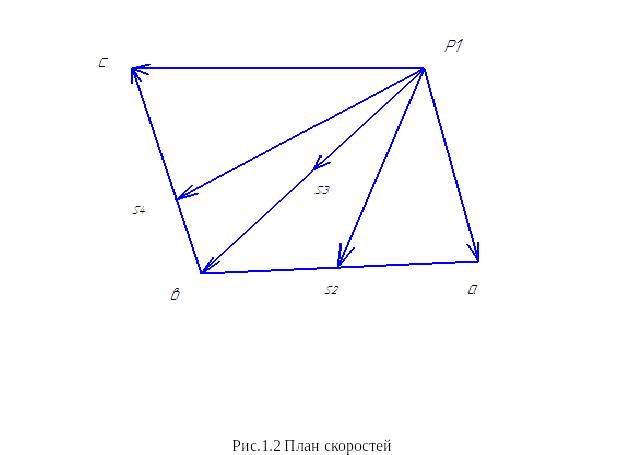
Построение планов скоростей.
В масштабе v строим 12 планов скоростей.
![]()
где VА – линейная скорость т. А;
1
– частота вращения звена ОА,
![]() ;
;
1=![]()
![]()
![]() ;
;
lОА – истинная длина звена ОА в м.
![]()
Определяем масштаб плана скоростей:
V =
![]() -
отрезок в мм на плане скоростей,
характеризующий истинную скорость
точки А. Выбирается произвольно. Примем
=40
мм, тогда
-
отрезок в мм на плане скоростей,
характеризующий истинную скорость
точки А. Выбирается произвольно. Примем
=40
мм, тогда
V = .
.
т. Р – полюс плана скоростей.
![]()
![]()
где
![]() -
вектор линейной скорости точки В.
Направлен перпендикулярно к звену ВС
в сторону вращения этого звена;
-
вектор линейной скорости точки В.
Направлен перпендикулярно к звену ВС
в сторону вращения этого звена;
![]() - вектор линейной скорости точки А.
Направлен перпендикулярно к звену ОА
в сторону вращения этого звена;
- вектор линейной скорости точки А.
Направлен перпендикулярно к звену ОА
в сторону вращения этого звена;
![]() - вектор скорости точки В в относительном
вращательном движении вокруг точки А.
Известен только по направлению и
перпендикулярен звену АВ.
- вектор скорости точки В в относительном
вращательном движении вокруг точки А.
Известен только по направлению и
перпендикулярен звену АВ.
![]() -
вектор линейной скорости точки С.
Направлен по ходу ползуна;
-
вектор линейной скорости точки С.
Направлен по ходу ползуна;
Для
построения плана скоростей из точки Р1
проводим
![]() =40
мм перпендикулярно звену ОА. Из точки
Р1 проводим
линию, перпендикулярную звену ВО3
в сторону вращения этого звена. Из конца
вектора
=40
мм перпендикулярно звену ОА. Из точки
Р1 проводим
линию, перпендикулярную звену ВО3
в сторону вращения этого звена. Из конца
вектора
![]() перпендикулярно
звену АВ проводим линию до пересечения
ее с линией, перпендикулярной звену
ВО3. Точка пересечения этих линий
– точка b. Таким образом,
направления векторов
и
перпендикулярно
звену АВ проводим линию до пересечения
ее с линией, перпендикулярной звену
ВО3. Точка пересечения этих линий
– точка b. Таким образом,
направления векторов
и![]()
![]() совпадают с направлением движения
звеньев ОА и ВО3 соответственно,
начало вектора
совпадают с направлением движения
звеньев ОА и ВО3 соответственно,
начало вектора
![]() находится в конце вектора
,
конец – в конце вектора
.
находится в конце вектора
,
конец – в конце вектора
.
Для нахождения точки с на плане скоростей из полюса проводим вектор, совпадающий с направлением скорости точки С (вертикально вверх или вертикально вниз по ходу ползуна). На пересечении этих векторов и находится точка с.(рис1.2)
Построив таким же образом остальные планы скоростей, найдем истинные значения скоростей VB, VBA, VС, VСВ, по формулам:
![]()
![]()
![]()
![]()
где
![]()
![]()
![]()
![]() ,
- отрезки в мм на плане скоростей;
,
- отрезки в мм на плане скоростей;
V – масштаб плана скоростей.
Определяем линейную скорость точки В для 1-ого положения:
![]()
где
![]() - отрезок в мм на плане скоростей;
- отрезок в мм на плане скоростей;
V – масштаб плана скоростей.
![]()
Подставляя
соответствующие значения
![]() для остальных положений в формулу
нахождения линейной скорости точки В
получим:
для остальных положений в формулу
нахождения линейной скорости точки В
получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определяем истинную скорость точки В в относительном вращательном движении вокруг точки А.
![]()
где
![]() - отрезок в мм на плане скоростей;
- отрезок в мм на плане скоростей;
V – масштаб плана скоростей.
![]()
Подставляя
соответствующие значения
![]() для остальных рабочих положений в
формулу нахождения линейной скорости
точки В в относительном вращательном
движении вокруг точки А, получим:
для остальных рабочих положений в
формулу нахождения линейной скорости
точки В в относительном вращательном
движении вокруг точки А, получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определяем истинную скорость точки С в относительном вращательном движении вокруг точки В.
![]()
где
![]() - отрезок в мм на плане скоростей;
- отрезок в мм на плане скоростей;
V – масштаб плана скоростей.
![]()
Подставляя соответствующие значения cb для остальных рабочих положений в формулу нахождения линейной скорости точки C в относительном вращательном движении вокруг точки B, получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определяем истинное значение линейной скорости точки С:
![]()
где
![]() - отрезок в мм на плане скоростей;
- отрезок в мм на плане скоростей;
V – масштаб плана скоростей.
![]()
Подставляя
соответствующие значения
![]() для остальных положений в формулу
нахождения линейной скорости точки С,
получим:
для остальных положений в формулу
нахождения линейной скорости точки С,
получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определяем скорости центров масс звена АВ
![]()
где
![]() - отрезок в мм на плане скоростей;
- отрезок в мм на плане скоростей;
V – масштаб плана скоростей.
![]()
Подставляя соответствующие значения для остальных положений в формулу нахождения линейной скорости точки S2, получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определяем скорости центров масс звена О3В
![]()
где
![]() - отрезок в мм на плане скоростей;
- отрезок в мм на плане скоростей;
V – масштаб плана скоростей.
![]()
Подставляя соответствующие значения для остальных положений в формулу нахождения линейной скорости точки S3, получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определяем скорости центров масс звена ВС
![]()
где
![]() - отрезок в мм на плане скоростей;
- отрезок в мм на плане скоростей;
V – масштаб плана скоростей.
![]()
Подставляя соответствующие значения для остальных положений в формулу нахождения линейной скорости точки S4, получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Также находим угловые скорости звена АВ для каждого положения:
![]()
где VBA – истинное значение скорости т. В в относительном вращательном движении вокруг точки А;
lАВ – истинная длина звена АВ в м.
Подставляя в данную формулу соответствующие для каждого положения значения VBA, получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Находим угловые скорости звена О3В для каждого положения:
где VBО3 – истинное значение скорости т. В в относительном вращательном движении вокруг точки О3;
lВО3 – истинная длина звена ВО3 в м.
Подставляя в данную формулу соответствующие для каждого положения значения VBО3, получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Находим угловые скорости звена СВ для каждого положения:
![]()
где VСВ - скорость точки В в относительном вращательном движении вокруг точки C;
lВC = 410 мм =0,41 м.
Подставляя в данную формулу соответствующие для каждого положения значения VCВ, получим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Результаты расчетов заносим в таблицу 1.1.
Таблица 1.1.
Линейные и угловые скорости механизма.
Параметры
Полож. мех. |
VA,м/с |
VB,м/с |
VBА,м/с |
VCВ,м/с |
VС,м/с |
VS2 |
VS3 |
VS4 |
ВА, м/с |
ВО3, м/с |
CВ, м/с |
0, 12 |
1,58 |
2,02 |
1,4 |
2,04 |
0 |
1,71 |
0 |
1,28 |
7 |
9,2 |
4 |
1 |
1,58 |
2,22 |
1,87 |
1,67 |
1,95 |
171 |
1,13 |
1,95 |
9,35 |
10,57 |
4,07 |
2 |
1,58 |
2,14 |
2,1 |
0,15 |
2,26 |
1,56 |
1,09 |
2,22 |
10,5 |
10,19 |
0,36 |
3 |
1,58 |
1,59 |
2,03 |
0,89 |
1,01 |
1,24 |
0,81 |
1,32 |
10,15 |
9,04 |
2,17 |
4 |
1,58 |
1,32 |
1,75 |
1,09 |
0,46 |
1,17 |
0,66 |
0,89 |
8,75 |
6,28 |
2,65 |
5 |
1,58 |
1,09 |
1,4 |
1,05 |
0,15 |
1,13 |
0,58 |
0,7 |
7 |
5,19 |
2,56 |
6 |
1,58 |
1,05 |
1,44 |
1,01 |
0,12 |
1,13 |
0,54 |
0,66 |
7,2 |
5 |
2,46 |
7 |
1,58 |
1,17 |
1,24 |
0,93 |
0,39 |
1,24 |
0,58 |
0,81 |
6,2 |
5,57 |
2,26 |
8 |
1,58 |
1,2 |
1,09 |
0,7 |
1,7 |
1,28 |
0,58 |
0,97 |
5,45 |
5,71 |
1,7 |
9 |
1,58 |
1,44 |
0,97 |
0,27 |
1,28 |
1,44 |
0,78 |
1,4 |
4,85 |
6,85 |
0,65 |
10 |
1,58 |
1,56 |
0,93 |
0,62 |
1,75 |
1,44 |
0,78 |
1,56 |
4,65 |
7,42 |
1,51 |
11 |
1,58 |
1,59 |
1,17 |
1,56 |
1,4 |
1,56 |
0,89 |
1,48 |
5,85 |
7,57 |
3,8 |
1.3 Построение плана ускорений для заданного (7-го) положения механизма.
Т. к. угловая скорость звена ОА 1=const, то ускорение точки А определим по формуле:
![]()
где lОА – истинная длина звена ОА;
1 - угловая скорость звена ОА.
![]()
Из полюса плана ускорений отложим отрезок произвольной длины а параллельно звену ОА от точки А к точке О. Примем а = 100 мм, тогда масштаб плана ускорений:
где
![]() -
ускорение точки А;
-
ускорение точки А;
а – отрезок в мм на плане ускорений, изображающий истинное ускорение точки А.
Для определения ускорения точки В используем следующие векторные уравнения:
![]()
где
![]() - вектор абсолютного ускорения точки
В;
- вектор абсолютного ускорения точки
В;
![]() - вектор нормального ускорения точки В
в относительном вращательном движении
вокруг точки А. Направлен параллельно
звену ВА от В к А;
- вектор нормального ускорения точки В
в относительном вращательном движении
вокруг точки А. Направлен параллельно
звену ВА от В к А;
![]() - вектор тангенциального ускорения
точки В в относительном вращательном
движении вокруг точки А. Направлен
перпендикулярно звену ВА.
- вектор тангенциального ускорения
точки В в относительном вращательном
движении вокруг точки А. Направлен
перпендикулярно звену ВА.
![]()
где
![]() - вектор нормального ускорения точки В
в относительном вращательном движении
вокруг точки О3.
Направлен параллельно звену ВО3
от В к О3;
- вектор нормального ускорения точки В
в относительном вращательном движении
вокруг точки О3.
Направлен параллельно звену ВО3
от В к О3;
![]() - вектор тангенциального ускорения
точки В в относительном вращательном
движении вокруг точки О3.
Направлен перпендикулярно звену ВО3;
- вектор тангенциального ускорения
точки В в относительном вращательном
движении вокруг точки О3.
Направлен перпендикулярно звену ВО3;
![]() -
вектор абсолютного ускорения точки C.
Равный по модулю вектору
-
вектор абсолютного ускорения точки C.
Равный по модулю вектору
![]() .
.
Величину
нормального ускорения
![]() определяем по формуле:
определяем по формуле:
![]()
где lВА - истинная длина звена ВА (в 7-м положении);
![]()
Чертежное
значение
![]() ,
изображающее ускорение
на плане ускорений в масштабе W,
определяем по формуле:
,
изображающее ускорение
на плане ускорений в масштабе W,
определяем по формуле:
![]()
где - вектор нормального ускорения точки В в относительном вращательном движении вокруг точки А;
![]() - масштаб плана ускорений.
- масштаб плана ускорений.
![]()
Величину
нормального ускорения
![]() определяем по формуле:
определяем по формуле:
![]()
где lВО3 - истинная длина звена ВО3 (в 7-м положении);
![]()
Чертежное
значение
![]() ,
изображающее ускорение
на плане ускорений в масштабе W,
определяем по формуле:
,
изображающее ускорение
на плане ускорений в масштабе W,
определяем по формуле:
![]()
где - вектор нормального ускорения точки В в относительном вращательном движении вокруг точки О3;
- масштаб плана ускорений.
![]()
Для определения ускорения точки С используем следующее векторное уравнение:
![]()
где - вектор абсолютного ускорения точки С;
![]() - вектор нормального ускорения точки В
в относительном вращательном движении
вокруг точки C. Направлен
параллельно звену ВC от
С к В;
- вектор нормального ускорения точки В
в относительном вращательном движении
вокруг точки C. Направлен
параллельно звену ВC от
С к В;
![]() - вектор тангенциального ускорения
точки В в относительном вращательном
движении вокруг точки C.
Направлен перпендикулярно звену CВ.
- вектор тангенциального ускорения
точки В в относительном вращательном
движении вокруг точки C.
Направлен перпендикулярно звену CВ.
Величину
нормального ускорения
![]() определяем по формуле:
определяем по формуле:
![]()
где lCВ - истинная длина звена CВ (в 7-м положении);
![]()
Чертежное
значение
![]() ,
изображающее ускорение
на плане ускорений в масштабе W,
определяем по формуле:
,
изображающее ускорение
на плане ускорений в масштабе W,
определяем по формуле:
![]()
где - вектор нормального ускорения точки В в относительном вращательном движении вокруг точки C;
- масштаб плана ускорений.
![]()
Построение ведем в такой последовательности (рис. 1.3).
После построения
![]() ,
из конца этого вектора проводим вектор
,
из конца этого вектора проводим вектор
![]() ,
изображающий ускорение
на плане ускорений. Из конца этого
вектора проводим отрезок произвольной
длины перпендикулярно звену АВ. Из
полюса плана
ускорений проводим вектор
,
изображающий ускорение
на плане ускорений. Из конца этого
вектора проводим отрезок произвольной
длины перпендикулярно звену АВ. Из
полюса плана
ускорений проводим вектор
![]() ,
изображающий ускорение
на плане ускорений. Из конца этого
вектора перпендикулярно звену ВО3
проводим отрезок до пересечения его с
отрезком, проведенным перпендикулярно
звену АВ. Точка их пересечения – точка
B. Соединив полюс
с точкой
,
изображающий ускорение
на плане ускорений. Из конца этого
вектора перпендикулярно звену ВО3
проводим отрезок до пересечения его с
отрезком, проведенным перпендикулярно
звену АВ. Точка их пересечения – точка
B. Соединив полюс
с точкой
![]() ,
получим вектор
,
получим вектор
![]() ,
характеризующий абсолютное ускорение
точки В (WB)
на плане ускорений. Соединив конец
вектора
с
точкой
,
получим вектор
,
характеризующий абсолютное ускорение
точки В (WB)
на плане ускорений. Соединив конец
вектора
с
точкой
,
получим вектор
![]() ,
изображающий ускорение
,
изображающий ускорение
![]() на плане ускорений, конец вектора
на плане ускорений, конец вектора
![]() с точкой
,
- вектор
с точкой
,
- вектор
![]() ,
изображающий ускорение
,
изображающий ускорение
![]() на плане ускорений. Соединив а и в -
получим вектор
,
характеризующий ускорение точки В в
относительном вращательном движении
вокруг точки А. Из точки в проводим
вектор параллельно звену СВ, который
характеризует нормальное ускорение
звена CВ. Из конца этого
вектора проводим отрезок, перпендикулярный
звену СВ до пересечения с вертикальной
линией, проходящей через полюс .
Этот отрезок характеризует тангенциальное
ускорение звена CВ. Соединив
полюс с концом последнего отрезка,
получим полное ускорение т.С, направленное
параллельно оси оу вверх.
на плане ускорений. Соединив а и в -
получим вектор
,
характеризующий ускорение точки В в
относительном вращательном движении
вокруг точки А. Из точки в проводим
вектор параллельно звену СВ, который
характеризует нормальное ускорение
звена CВ. Из конца этого
вектора проводим отрезок, перпендикулярный
звену СВ до пересечения с вертикальной
линией, проходящей через полюс .
Этот отрезок характеризует тангенциальное
ускорение звена CВ. Соединив
полюс с концом последнего отрезка,
получим полное ускорение т.С, направленное
параллельно оси оу вверх.

Определение тангенциального ускорения точки В относительно точки А
![]() ,
,
где
![]() - отрезок в мм на плане ускорений
- отрезок в мм на плане ускорений
μW - масштаб плана ускорений
![]()
![]()
![]()
![]()
Определение полного ускорения точки В.
![]() ,
,
где
![]() -
отрезок в мм на плане ускорений
-
отрезок в мм на плане ускорений
μW - масштаб плана ускорений
![]()
![]()
![]()
![]()
Определение тангенциального ускорения точки С относительно точки В
![]() ,
,
где
![]() - отрезок в мм на плане ускорений
- отрезок в мм на плане ускорений
μW - масштаб плана ускорений
![]()
![]()
![]()
![]()
Определение полного ускорения точки С.
![]() ,
,
где
![]() -
отрезок в мм на плане ускорений
-
отрезок в мм на плане ускорений
μW - масштаб плана ускорений
![]()
![]()
![]()
![]()
Определение угловых ускорений.
Угловое ускорение звена АВ определяется по формуле:
![]()
![]()
![]()
![]()
![]()
Угловое ускорение звена ВC определяется по формуле:
![]()
![]()
![]()
![]()
![]()
Полученные данные заносим в таблицу 1.2
Таблица 1.2
Линейные и угловые ускорения т.D
Параметр
Полож. мех. |
WA м/с2 |
W м/с2 |
W м/с2 |
W м/с2 |
WB м/с2 |
W м/с2 |
W м/с2 |
WC м/с2 |
ВА, 1/c2 |
СВ, 1/c2 |
3 |
11,9 |
20,56 |
12,17 |
2,13 |
14,04 |
5,47 |
6,66 |
13,56 |
27,35 |
16,24 |
4 |
11,9 |
15,4 |
11,01 |
3,33 |
6,3 |
0,357 |
4,76 |
7,97 |
1,785 |
11,6 |
7 |
11,9 |
7,78 |
6,09 |
2,31 |
11,06 |
2,38 |
1,78 |
4,16 |
11,9 |
4,34 |
10 |
11,9 |
4,75 |
11,01 |
0,94 |
11,42 |
0 |
12,73 |
4,52 |
0 |
31,04 |
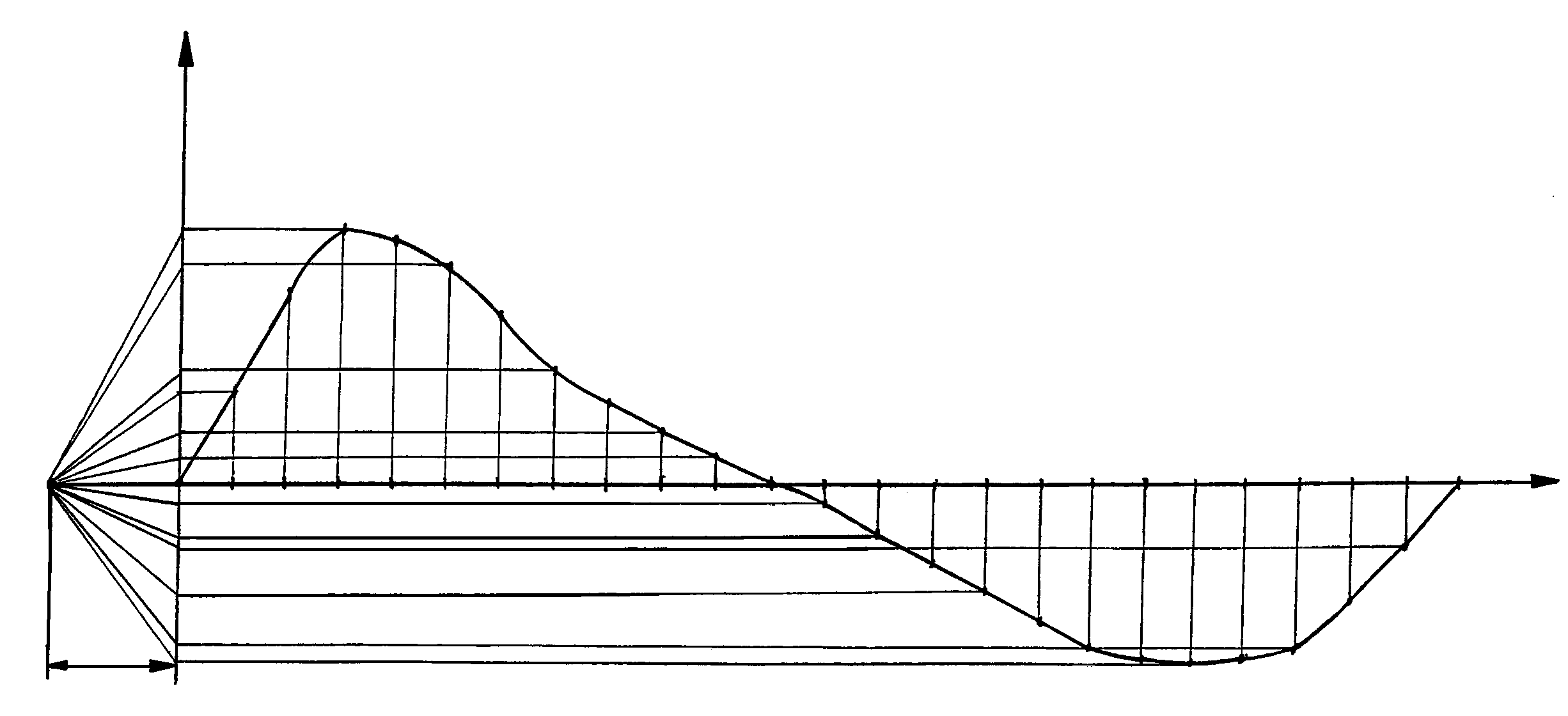
1.4 Построение диаграммы зависимости перемещения ползуна от угла поворота ведущего звена S=S().
Для построения диаграммы на оси абсцисс откладываем отрезок l0-12, (рис.1.4,а). Масштаб оси абсцисс определяется по формуле:
=![]()
где l0-12 – отрезок в мм. на диаграмме, характеризующий один полный оборот кривошипа. Примем l0-12 =240 мм, тогда
=![]()
Для нахождения масштаба времени используем формулу:
t=![]()
где - масштаб оси абсцисс данной диаграммы;
1 – угловая скорость звена ОА.
t=![]()
Вдоль оси ординат откладываем перемещение ползуна С, опираясь на кинематическую схему механизма, начиная с нулевого положения. Каждый из 12-ти отрезков, на которые разбита ось абсцисс, соответствует определенному положению механизма. В первом положении перемещение ползуна С равно 0, следовательно, 0-ой точке на диаграмме будет соответствовать нулевое перемещение. На следующем (1-м) отрезке откладываем расстояние (в определенном масштабе),
 Sd
Sd
5` 6`
4` 7`
3` 8`
9`
2`
10`
1` 11`
![]()
0 1 2 3 4 5 6 7 8 9 10 11 12
Рис. 1.4 (а). Диаграмма зависимости перемещения ползуна от угла поворота ведущего звена
Vd
2``
3``
4``
1`` 5``
6`` 6 7 8 9 10 11 12
0 1 2 3 4 5
7`` 12``
8``
H1
9`` 10`` 11``
Рис. 1.4 (б). Диаграмма зависимости скорости ползуна от угла поворота ведущего звена
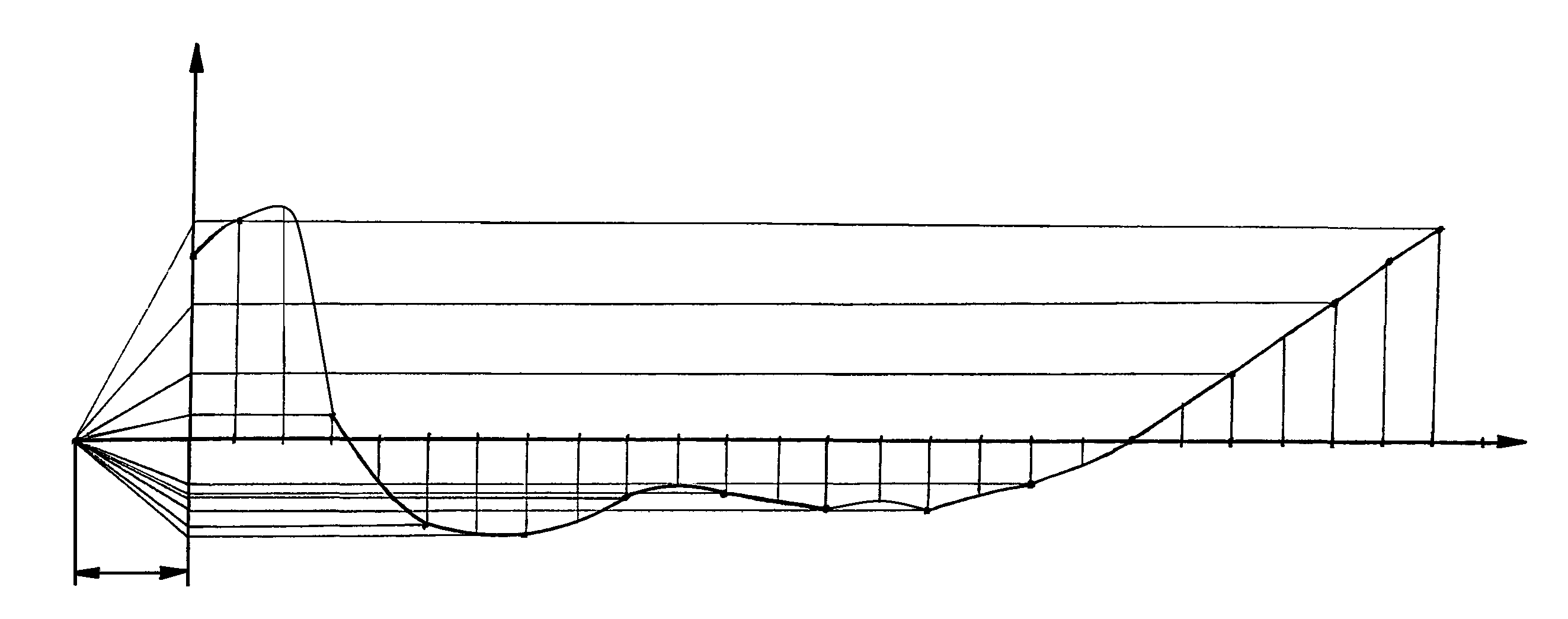
Wd
1”’ 1”’
12”’
11”’
2”’2 3 4 5 6 7 8 9
P2 0 1 10”’10 11 12 1
5”’ 6”’ 9”’
3”’ 4”’ 7”’ 8”’
H2
Рис. 1.4 (в). Диаграмма зависимости ускорения ползуна от угла поворота ведущего звена
которое соответствует перемещению ползуна из 0-го в 1-ое положение (отрезку С0С1 из кинематической схемы механизма). На 2-м отрезке (в том же масштабе) откладываем расстояние, которое соответствует перемещению ползуна из 0-го во 2-ое положение (отрезку С0С2). Таким же образом откладываем остальные расстояния вдоль оси ординат на диаграмме, заканчивая 12-м положением, которое характеризуется 0-м перемещением ползуна (т. е. ордината равна 0). Полученные точки соединяем и получаем кривую расстояний точки С от нулевого крайнего положения (нумеруем эти точки 1’,2’,3’) и т. д.
Определяем масштаб оси ординат данной диаграммы по формуле:
S=
где
![]() –
расстояние на кинематической схеме
механизма, соответствующее перемещению
ползуна С из 0-го в i-тое
положение (например, в 10-ом), тогда
С0С10=60 мм;
–
расстояние на кинематической схеме
механизма, соответствующее перемещению
ползуна С из 0-го в i-тое
положение (например, в 10-ом), тогда
С0С10=60 мм;
![]() - расстояние вдоль оси ординат на
диаграмме перемещения т. С, соответствующее
i-тому отрезку (в данном
случае отрезку 10),
- расстояние вдоль оси ординат на
диаграмме перемещения т. С, соответствующее
i-тому отрезку (в данном
случае отрезку 10),
![]() =30
мм;
=30
мм;
l - масштаб построения кинематической схемы механизма.
S=![]()
1.5 Построение диаграммы зависимости скорости ползуна С от угла поворота ведущего звена V=V().
Построение осуществляем графическим дифференцированием диаграммы перемещения (с помощью метода хорд). Для построения данной диаграммы на оси абсцисс откладываем отрезок l0-12 =240 мм и разбиваем его на 12 равных частей, по величине равных отрезкам с диаграммы перемещения ползуна С (рис. 1.4,б). На этой же оси откладываем влево от оси ординат расстояние Н1 – полюсное расстояние в мм. Выбирается произвольно. Получаем точку Р1 (примем Н1=43,35 мм).
На диаграмме перемещения точки С проводим прямые линии, соединяющие точки 01’, 1’2’, 2’3, и т. д. На диаграмме скорости точки С делим построенные по оси абсцисс отрезки на равные части. Далее для каждого рабочего положения осуществляем следующие действия: из точки Р1 на графике скорости проводим линию, параллельную линии 01’, до пересечения ее с осью ординат. Из полученной точки пересечения на оси ординат проводим отрезок, параллельный оси абсцисс до середины участка 01. Конец этого отрезка - точка 1’’.
Аналогичным образом осуществляем действия для всех рабочих положений и получаем точки 2’’,3’’,4’’ и т. д. Соединив полученные точки, получим диаграмму скорости точки С. Точкам 0 и 12 на оси абсцисс должна соответствовать 0-ая ордината.
Масштаб оси ординат диаграммы скорости точки С определяем по формуле:
где S – масштаб оси ординат диаграммы перемещения точки С;
t – масштаб времени;
Н1 – полюсное расстояние.
1.6 Построение диаграммы зависимости ускорения точки С от угла поворота ведущего звена W=W().
Построение осуществляем графическим дифференцированием диаграммы скорости точки С (рис.1.4,в). Для построения диаграммы на оси абсцисс откладываем отрезок l0-12 =240 мм и разбиваем его на 12 равных частей, равных по величине отрезкам диаграммы скорости точки С. Вправо от отрезка l0-12 на этой же оси откладываем длину еще одного отрезка, равного по величине тем, на которые разбит отрезок l0-12. (получили тринадцать равных по величине отрезков). Влево от оси ординат откладываем полюсное расстояние Н2. Выбирается произвольно (примем Н2=39,2 мм). Получаем точку Р2. На диаграмме скорости точки С соединяем прямыми линиями точки пересечения этой диаграммы с линиями, проведенными вдоль оси оу из точек 1, 2, 3 и т. д., находящихся на оси абсцисс данной диаграммы. Далее осуществляем действия, аналогичные тем, которые изложены выше в п. 1.5 при построении диаграммы скорости точки С. В данном случае точки пересечения середин отрезков 0-12 с линиями, параллельными оси абсцисс, называем 1’’’, 2’’’, 3’’’ и т. д. В середину отрезка 12-1 параллельным переносом сносим точку 1’’’, а также точку пересечения диаграммы ускорения и линии, проведенной вдоль оси оу из точки 1, расположенной на оси абсцисс. Соединяем эти две точки с точкой 12’’’. Из т.12 на оси абсцисс проводим линию вдоль оси ох до ее пересечения с графиком ускорения. Получаем некоторую точку. Т. к. т.12 соответствует точке 0, параллельным переносом перемещаем полученную точку на ось ординат. Соединяем полученную точку с точкой 1’’’ . Линии параллельного переноса и линии находящиеся «правее» точки 12 на оси абсцисс данной диаграммы, должны быть проведены пунктиром.
Масштаб оси ординат диаграммы перемещения определяется по следующей формуле:
где
![]() - масштаб оси ординат диаграммы скорости
точки С;
- масштаб оси ординат диаграммы скорости
точки С;
t – масштаб времени;
Н2 - полюсное расстояние.