

3. Регулирование частоты вращения асинхронного двигателя
![]()
Скорость двигателя может регулироваться, путем изменения частоты питающей сети.
Для того, чтобы КПД,
![]() ,
перегрузочная способность до и после
регулировки оставались постоянными,
необходимо вместе с частотой регулировать
напряжение и момент
,
перегрузочная способность до и после
регулировки оставались постоянными,
необходимо вместе с частотой регулировать
напряжение и момент
![]() .
Недостаток этого метода заключается в
том, что необходимо дополнительное
устройство – преобразователь частоты.
.
Недостаток этого метода заключается в
том, что необходимо дополнительное
устройство – преобразователь частоты.

10 лекция.
2. За счет включения активного сопротивления в цепь якоря у двигателя с фазным ротором.
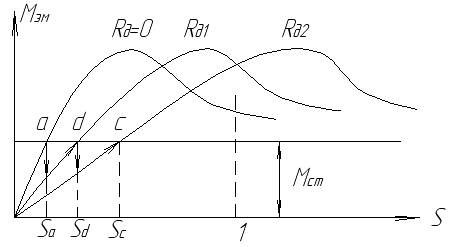

Недостаток: КПД понижается, диапазон регулирования зависит от тормозного момента (от нагрузки).
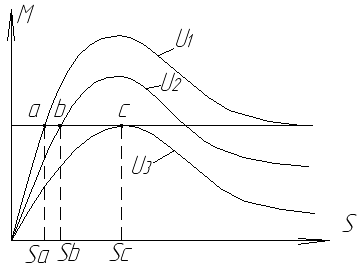
3. Изменение напряжения питающей сети.
![]()
Недостаток: малый диапазон регулирования.
4. Изменение числа пар полюсов.
![]()
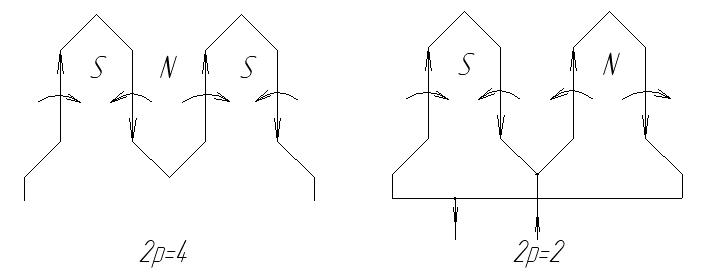
Для изменения числа пар полюсов, необходимо взять обмотку, у которой фаза состоит из двух частей, имея направление тока в одной из них , мы изменяем число пар полюсов.
Существуют двух, трех, четырех скоростные двигатели. У двух скоростных двигателей имеется обмотка с переключением пар полюсов. У трех и четырех скоростных двигателей имеются две обмотки, уложенные в те же самые пазы, в трехскоростном двигателе одна обмотка с регулировкой пор полюсов, другая без регулировки.
В случае четырехскоростного двигателя, регулирование идет в обеих обмотках.
Этот способ применяется только в двигателях с короткозамкнутым ротором, т.к пришлось бы менять число пар полюсов и у ротора.
5. Наиболее распространенная промышленная система – это переключение со звезды на двойную звезду.
6. Импульсное регулирование.
Напряжение на обмотки подается в виде импульсов, меняя соотношение длительности паузы и включенного состояния, достигается необходимая частота вращения.
7. Путем введения добавочной ЭДС в цепь ротора.
4. Режим асинхронного двигателя и векторная диаграмма
Образуется вращающееся поле, частота
вращения изменяется от
![]() до
до
![]() .
.
П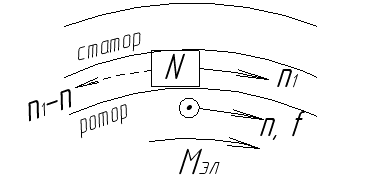 ри
вращении магнитного поля оно будет
пересекать проводники ротора, в
проводниках возникает ЭДС, под действием
которой будет протекать ток, проводник
с током взаимодействует с вращающимся
магнитным полем и возникает электромагнитный
момент.
ри
вращении магнитного поля оно будет
пересекать проводники ротора, в
проводниках возникает ЭДС, под действием
которой будет протекать ток, проводник
с током взаимодействует с вращающимся
магнитным полем и возникает электромагнитный
момент.
По правилу правой руки определяем направление тока в проводнике, далее используем правило левой руки, чтоб определить силу, действующую на проводник. Момент получили вращающий - это доказывает, что мы имеем режим асинхронного двигателя.
В случае, когда n=n1 (идеальный холостой ход, скорость ротора равна скорости магнитного поля) поле не будет пересекать проводники ротора, ЭДС ротора будет равна нулю, ток ротора равен нулю и, следовательно, момент будет равен нулю. Поэтому этот режим возможен только в том случае, если ротор приводится во вращение другим приводным двигателем. И в этом случае мощность из сети потребляется на покрытие потерь в стали, а механические и добавочные потери покрываются за счет мощности приводного двигателя.
 -
режим асинхронного двигателя.
-
режим асинхронного двигателя.
Уравнение равновесия:
![]()
![]()
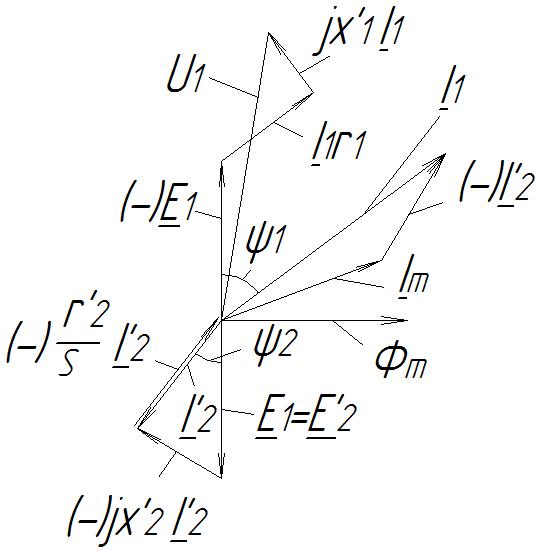
![]()
Учитывая, что асинхронные двигатели
работают от сети с постоянным напряжением
![]() ,
увеличение тока нагрузки приводит к
уменьшению ЭДС
,
увеличение тока нагрузки приводит к
уменьшению ЭДС
![]() ,
а поскольку
пропорциональна магнитному потоку, то
увеличение тока
,
а поскольку
пропорциональна магнитному потоку, то
увеличение тока
![]() приводит к уменьшению магнитного потока.
приводит к уменьшению магнитного потока.
Поскольку падение напряжения при
номинальной нагрузке составляет
несколько % от
![]() ,
принято считать, что магнитный поток
при изменении нагрузки остается
постоянным.
,
принято считать, что магнитный поток
при изменении нагрузки остается
постоянным.
Асинхронный двигатель из сети потребляет активную и реактивную мощность, активная идет на покрытие потерь и преобразовывается в механическую, реактивная мощность потребляется для создания магнитного поля.