

Тема 5 Итерационные методы решения слау
Итерационные методы особенно эффективны при большом порядке СЛАУ.
Предварительно приведем систему (4.1) к виду
![]()
 ,
где
,
где
![]() ,
,
![]() ,
,
![]() (5.1)
(5.1)
........................
![]() ,
,
Исходя
из начального приближения
![]() ,
получают векторы
,
получают векторы
![]() ,...,
,...,![]() по рекурентной формуле
по рекурентной формуле
![]() .
(5.2)
.
(5.2)
Здесь
Fk
– некоторая функция, зависящая от
матрицы коэффициен-тов А
системы (4.2), правой части
,
номера приближения k
и предыдущих приближений
![]() .
.
Метод
имеет 1-й порядок,
если Fk
не
зависит от
![]() ,
а зависит только от
,
а зависит только от
![]() .
.
Метод стационарный, если Fk не зависит от k.
Простейший случай: если Fk - линейная функция, то общий линейный метод 1 – го порядка должен иметь вид
![]() (5.3)
(5.3)
Здесь
А
– квадратная матрица,
![]() -
вектор.
-
вектор.
Метод Якоби (простой итерации)
К виду (5.3) можно привести, например, выделением диагональных элементов (для i – строки)
 ,
i
=
1, 2, ..., n
(5.4)
,
i
=
1, 2, ..., n
(5.4)
Строим
последовательность векторов, начиная
с произвольного вектора
![]() (
(![]() , i
=
1, 2, ..., n)
, i
=
1, 2, ..., n)
![]() ,
,
![]() ,
... ,
,
,
... ,
,
где
 ,
i
=
1, 2, ..., n
(5.5)
,
i
=
1, 2, ..., n
(5.5)
Метод Гаусса - Зейделя
В этом методе уточненное значение x1 сразу же используется для вычисления x2, а x1 и x2 для вычисления x3 и т.д.
Зададимся начальным приближением неизвестных.
Обычно
принимают
![]() ,
,
![]() ,
... ,
,
... ,
![]() .
.
Начальные приближения подставляют в 1-е уравнение системы (5.1).
![]() ,
,
затем
подставляем
![]() ,
,
![]() ,
... ,
,
... ,
![]() во 2-е уравнение
во 2-е уравнение
![]() .
.
Подставляем
,
![]() ,
,![]() , ... ,
, ... ,
Подставляем
,
,
... ,
![]() ,
выполним 2-ю итерацию.
,
выполним 2-ю итерацию.
Приближения с номером k определим по формуле

![]()
![]() (5.6)
(5.6)
...................
![]() ,
,
Т.е.
координаты вектора
![]() определяют по формуле
определяют по формуле
![]() ,
i
=
1, 2, ..., n
(5.7)
,
i
=
1, 2, ..., n
(5.7)
Для сходимости метода необходимо, чтобы
все диагональные элементы были отличны от 0 (aii ≠ 0);
диагональные элементы значительно преобладали над остальными коэффициентами матрицы А.
В общем случае критерий окончания итерационного процесса при заданной допустимой погрешности ε > 0 определяется:
по абсолютным отклонениям в виде
![]() ,
i
=
1, 2, ..., n
,
i
=
1, 2, ..., n
по относительным разностям в виде
 (5.8)
(5.8)
Тема 6 Решение нелинейных уравнений
Различают две группы нелинейных уравнений:
- алгебраические, содержащие только алгебраические функции (целые, рациональные, иррациональные):
трансцендентные (тригонометрические, показательные, логарифмические).
 F(x)
= 0 (6.1)
F(x)
= 0 (6.1)
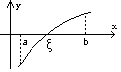
Корнем (решением) уравнения называется всякое значение ξ, обращающее (6.1) в тождество.
Методы решения нелинейных уравнений:
прямые, позволяющие записать решение в виде некоторой конечной формулы;
итерационные, т.е. методы последовательных приближений.
Прямыми методами решают простые уравнения.
Большинство итерационных методов предполагает, что заранее известны некоторые, достаточно малые окрестности, в каждой из которых имеется только один корень.
Т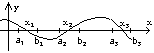 .о.
задача приближенного вычисления корней
уравнения (6.1) распадается на 2 задачи:
.о.
задача приближенного вычисления корней
уравнения (6.1) распадается на 2 задачи:
задача отделения корней, т.е. отыскания достаточно малых окрестностей, в каждой из которых заключен один и только один корень
Вычисление корня с заданной точностью, если известно его начальное приближение в области, не содержащей других корней.