

Формулы Ньютона - Котеса
Многие интегралы, не выражающиеся в конечном виде через элементарные функции, представляются быстросходящимися бесконечными рядами.
Вместо подынтегральной функции f(x) интегрируем интерполя-ционный многочлен Лагранжа для равноотстоящих узлов.
h =(b-a) / n.
xi = a + i h, i = 0, 1, ..., n.
y 0 = f(x0), y i = f(xi), ... , y n = f(xn).
![]() ,
(3.8)
,
(3.8)
где Hi – весовые коэффициенты (Котеса)
![]() (3.9)
(3.9)
При n = 1 получим формулу метода трапеций, при n = 2 – метода Симпсона.
Для метода трапеций: n = 1, i = 0, 1.
i
= 0
![]()
i
= 1
![]() .
.
Полученные формулы подставим в (3.8)
![]()
Для метода Симпсона: n = 2, i = 0, 1, 2.
i
= 0
![]()
i
= 1
![]()
i
= 2
![]()
После подстановки в (3.8) получим
![]()
![]()
Основные свойства коэффициентов Котеса
Из формулы (3.9) очевидно, что Hi не зависят от промежутка интегрирования и могут быть вычислены раз и навсегда.
Вычисления облегчаются благодаря тому, что равноотстоящие от концов коэффициенты Hi равны.
Замечание:
Формулу Ньютона – Котеса лучше применять для нечетного числа узлов, при этом точность повышается.
Тема 4 Решение систем линейных алгебраических уравнений
Рассмотрим систему, состоящую из n уравнений с n неизвестными.
a 11
x 1
+ a12 x
2
+ a13 x
3
+ ... + a1n
x n
= b 1
11
x 1
+ a12 x
2
+ a13 x
3
+ ... + a1n
x n
= b 1
a21 x 1 + a 22 x 2 + a23 x 3 + ... + a2n x n = b 2 (4.1)
........................
an1 x 1 + an2 x 2 + an3 x 3 + ... + ann x n = b n
где x i – неизвестные, подлежащие определению, aij – коэф-фициенты при неизвестных; b i - числа, называемые свободными членами (правыми частями) системы уравнений.
Форма записи системы (4.1) - скалярная
Совокупность чисел x 1 = λ1, x 2 = λ2, ..., x n = λ n, удовлетворяющих (4.1) называется решением СЛАУ.
СЛАУ называется совместной, если она имеет хотя бы одно решение; в противном случае она называется несовместной.
СЛАУ называется определенной, если это решение - единственное.
Если СЛАУ не имеет ни одного решения, то такая система является неопределенной.
Задача теории систем линейных уравнений состоит в разработке методов, позволяющих узнать:
совместна ли данная СЛАУ;
если совместна, то установить число решений;
указать способ отыскания этих решений.
Матричная форма записи системы (4.1) имеет вид
А
=
 ;
x
=
;
x
=
![]() ;
b
=
;
b
=![]() ;
;
![]() (4.2)
(4.2)
Некоторые обозначения:
АТ – матрица, транспонированная к матрице А, т.е. a ij = a ji.
А-1 – матрица, обратная к матрице А, т.е. А-1 · А = I,
где I - единичная матрица.
При решении СЛАУ возникают проблемы, связанные с вопросами:
разрешима ли данная СЛАУ;
каким методом ее решать;
какова чувствительность решения к ошибкам округления исходных данных.
Рассмотрим эти вопросы подробнее.
1) Теорема (из курса высшей алгебры)
Система n уравнений с n неизвестными, определитель которой отличен от 0, имеет решение, причем единственное.
(Это условие необходимое, но не достаточное.)
П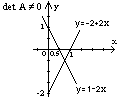 окажем
разрешимость СЛАУ на графике для системы
двух уравнений.
окажем
разрешимость СЛАУ на графике для системы
двух уравнений.
![]()

![]()
![]()
![]()
 det
A =
2∙1 – (-2)∙1 = 4 ≠ 0
det
A =
2∙1 – (-2)∙1 = 4 ≠ 0
k1 = -2, k2 = 2, k1 ≠ k2, т.е. прямые пересекаются
![]()
![]()
![]()
![]()
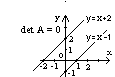
det A = (-1)∙(-1) – 1∙1 = 0
k1 =1, k2 = 1, k1 = k2, т.е. прямые не пересекаются
2) К выбору методов решения необходимо подходить рационально: например, метод Крамера требует около n2n! операций умножения и деления.
Т.е. для системы с 20 уравнениями и 20 неизвестными это число составляет 1021. Для современных ЭВМ, выполняющих миллионы операций в сек., для решения такой системы потребуется около 1015 сек. или 3∙106 лет.
Следовательно, для систем высокого порядка требуются методы, приводящие к меньшему числу операций.
3) Устойчивость решения относительно погрешностей правых частей и элементов матрицы покажем на примере:
![]() det
A = -
0,0001 ≠ 0
det
A = -
0,0001 ≠ 0
![]() точное
решение x1
= 1, x2
= 1
точное
решение x1
= 1, x2
= 1
Если
правые части
![]() вычислены с незначительной погрешностью,
b1
= 1,989903 и b2
= 1,970106, то получим решение
вычислены с незначительной погрешностью,
b1
= 1,989903 и b2
= 1,970106, то получим решение
x1 = 3, x2 = -1,0203.
Такие СЛАУ являются плохо обусловленными.
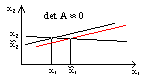
Геометрическая иллюстрация:
Графики прямых этой плохо обусловленной системы почти параллельны. Следовательно, небольшое изменение наклона или сдвиг одной прямой значительно влияет на положение точки пересечения прямых.
Критерий плохой обусловленности
![]() ,
,
![]() всегда ≥ 1.
всегда ≥ 1.
Чем больше , тем хуже обусловлена система ( ≈ 103 – 104).
На практике обычно проверяют неравенство 0 определителя СЛАУ.