

Основные понятия и определения теории механизмов и машин
Энергетической машиной называется машина для преобразования энергии. К ним относятся двигатели и генераторы.
Двигатели преобразуют любой вид энергии в механическую (например, электродвигатели преобразуют электрическую энергию, двигатели внутреннего сгорания преобразуют энергию расширения газов при сгорании в цилиндре).
Генераторы преобразуют механическую энергию в энергию другого вида (например, электрогенератор преобразует механическую энергию паровой или гидравлической турбины в электрическую).
Рабочая машина предназначена для преобразования материалов, причем транспортная машина преобразует материал только путем изменения положения объекта, а технологическая - форму, свойства и положение материала или объекта.
Информационная машина служит для получения и преобразования информации.
Контрольно-управляющая машина преобразует информацию с целью управления энергетическими или рабочими машинами, а математическая машина - с целью получения математических образов, соответствующих свойствам объекта.
Математическая машины преобразует входную информацию в математическую модель исследуемого объекта.
Кибернетическая машина имитирует или заменяет человека в процессах деятельности, присущих только ему или объектам живой природы, и обладает элементами искусственного интеллекта.
Виды существующих машин показаны на схеме (рис. 1.3).
Машина
Кибернетическая
Информационная
Рабочая
Энергетическая
Математическая Технологическая Генератор
Контрольно-управляющая Транспортная Двигатель
Рисунок 1.3 – Схема существующих машин
Машинным агрегатом называется техническая система, состоящая из одной или нескольких машин, соединенных последовательно или параллельно, и предназначенная для выполнения каких-либо требуемых функций (рис. 1.4).


Передаточная машина (ПМ)
Рабочая машина (РМ)
Двигатель (Д)
Контрольно-управляющая машина (Р)
Рисунок 1.4 – Схема машинного агрегата
В состав машинного агрегата входят: двигатель, передаточный механизм (их может быть несколько или не быть совсем) и рабочая (или энергетическая) машина. В состав машинного агрегата часто включается контрольно-управляющая или кибернетическая машина. Передаточный механизм в машинном агрегате необходим для согласования механических характеристик двигателя с механическими характеристиками рабочей или энергетической машины.
Устройство для приведения в действие машины (Д + ПМ + Р) называется приводом.
Составные элементы машин
Для машины, представляющей собой механическую систему, функциональными элементами могут быть: деталь, звено, группа, узел, простой или типовой механизм.
Деталь - элемент конструкции не имеющий в своем составе внутренних связей (состоящий из одного твердого тела).
Звено - твердое тело, или система жестко связанных твердых тел (может состоять из одной или нескольких деталей), входящее в состав механизма и совершающее особое относительное движение по отношению к другим телам.
Основные виды звеньев: стойка, кривошип, коромысло, ползун, кулиса, кулачок, зубчатое колесо. Кроме перечисленных жестких звеньев, в механизмах применяют гибкие (цепи, ремни), упругие (пружины, мембраны) звенья, а также жидкие и газообразные (масло, вода, газ, воздух и т.д.).
Стойка - звено, которое при исследовании механизма принимается за неподвижное (корпус механизма). Движение остальных звеньев механизма относительно стойки, считается условно-неподвижным.
Узел - несколько деталей связанных между собой функционально, конструктивно или каким-либо другим образом.
Соединение двух соприкасающихся звеньев, допускающее их относительное движение называется кинематической парой.
Кинематическая цепь - система звеньев, образующих между собой кинематические пары.
Группа - кинематическая цепь, состоящая из подвижных звеньев, связанных между собой кинематическими парами (отношениями), и удовлетворяющая некоторым заданным условиям.
Механические соединения могут быть подвижными (кинематические пары) и неподвижными. Неподвижные соединения делятся на разъемные (винтовые, штифтовые) и неразъемные (сварные, клеевые).
Составной частью любой машины является механизм.
Механизмом называется система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемое движение других твердых тел. Главное назначение создаваемого механизма - осуществление технической операции в результате движения его элементов.
Число степеней свободы или подвижность механизма - число независимых обобщенных координат, однозначно определяющее положение всех его звеньев на плоскости или в пространстве.
Звенья различают входные (ведущие), выходные (ведомые) и промежуточные. Входное звено - это звено, которому сообщается движение, преобразуемое механизмом в требуемое движение других звеньев. Выходное звено - это звено, совершающее движение, для выполнения которого предназначен данный механизм. Звенья обозначают цифрами, причем нумерация ведется от ведущего звена, а стойке присваивается «ноль».
Кинематические пары (табл. 1.1) обозначают заглавными латинскими буквами (A,B,C,D и т.д.).
Кинематическая схема механизма – чертеж механизма в выбранном масштабе с соблюдением условных обозначений звеньев и кинематических пар.
Различают высшие и низшие кинематические пары.
Высшая кинематическая пара – звенья соприкасаются по линии или в точке.
Низшая кинематическая пара – звенья соприкасаются по поверхностям (цилиндрический или шаровой шарниры, ползун и кулиса)
Высшие пары изнашиваются сильнее, чем низшие, так как чем больше поверхности, тем меньше удельное давление (давление на единицу площади).
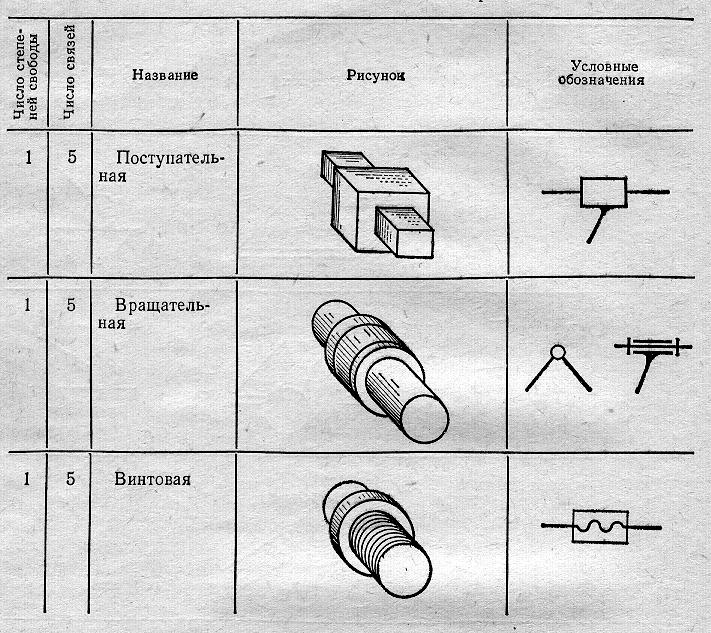
Таблица 1.1 - Основные виды кинематических пар
|
|
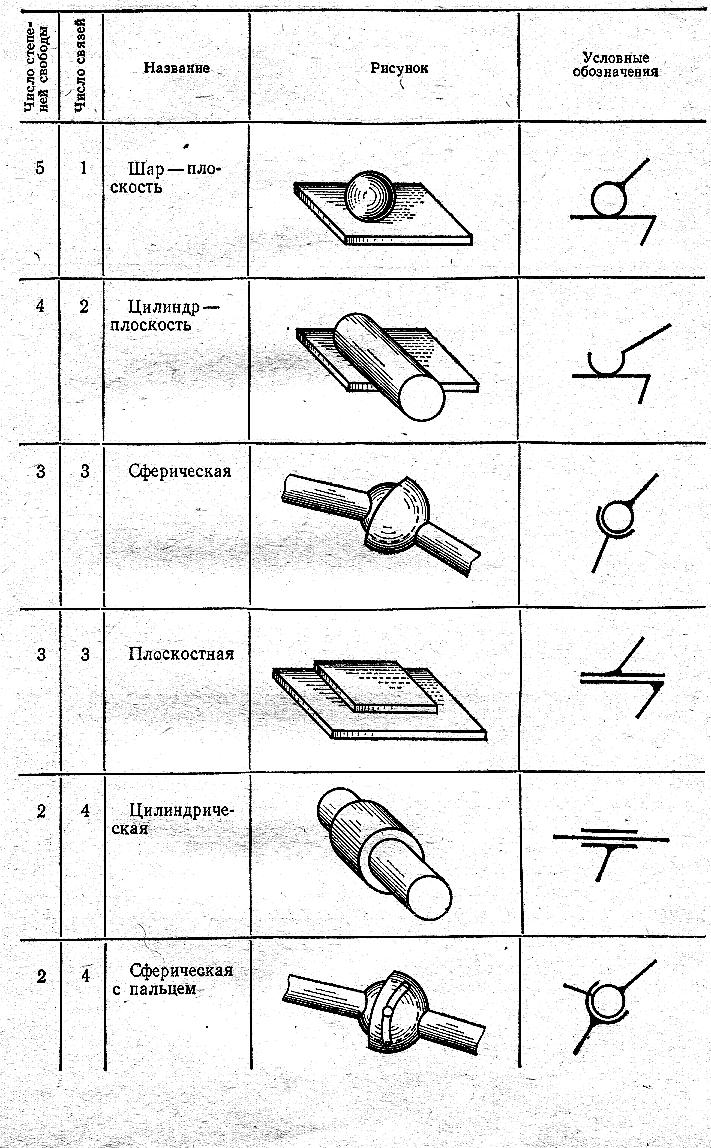
Число степеней свободы (подвижность) кинематической пары (Н) – число независимых координат, необходимых для описания относительного положения звеньев кинематических пар. Известно, что свободно движущееся в пространстве тело имеет шесть степеней свободы – шесть движений (три поступательных, три вращательных).
Число условий связи S, наложенных на относительное движение звена кинематической пары может изменяться в пределах 1 ≤ S ≤ 5.
Различают одно-, двух-, трех, четырех- и пятиподвижные кинематические пары. Следовательно, имеет место соотношение H = 6 – S.
Число уравнений связей принимают за номер класса (I…V).
На рисунке 1.5 изображены одноподвижные пары (кинематические пары V класса).
а) б) в)
Рисунок 1.5 - Одноподвижные кинематические пары V класса
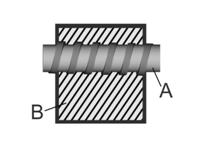
На рисунке 1.5 а – вращательная пара (цилиндрический шарнир), в которой наложены пять условий связи, т.е. исключены все движения, кроме вращательного. В поступательной паре (рис. 1.5 б) наложено пять условий связи: исключены все движения, кроме одного поступательного. В винтовой паре (рис. 1.5. в) наложено пять условий связи: исключены все движения, кроме поступательного.
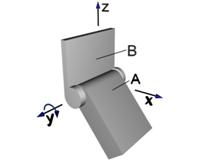
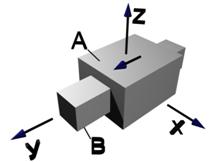
На рисунке 1.6 изображены пары двух-, трех-, четырех-, и пятиподвижные (соответственно кинематические пары IV, III, II и I классов).
 а)
а)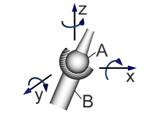 б)
б)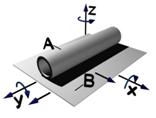 в)
в)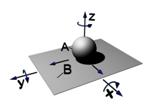 г)
г)
Рисунок 1.6 – Кинематические пары IV, III, II и I классов
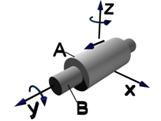
Пара двуподвижная (рис. 1.6 а) - втулка на валике. Наложено четыре условия связи, исключены поступательные и вращательные движения вдоль осей ОХ и ОZ.
Пара трехподвижная (рис. 1.6 б) - шаровой цилиндр. Наложено три условия связи: исключены поступательные движения вдоль всех трёх осей.
Пара четырехподвижная (рис. 1.6 в) - цилиндр на плоскости. Наложено два условия связи: исключено поступательное движение вдоль оси OZ и вращательное вокруг оси OX.
Пара пятиподвижная (рис. 1.6 г) - шар на плоскости. Наложено одно условие связи: исключено поступательное движение вдоль оси OZ.
По характеру сопряжения различают кинематические пары с силовым замыканием (соприкосновение звеньев обеспечивается действием какой - либо силы, например, веса или пружины) и кинематическим (постоянный контакт звеньев достигается за счет конструктивной формы элементов).
Группа Ассура – кинематическая цепь, присоединение которой к механизму или ее отсоединение образует механизм, имеющий подвижность, равную подвижности исходного механизма, не разделяемая на другие цепи с теми же свойствами.
В зависимости от характера относительного движения звеньев кинематические пары подразделяют на поступательные, вращательные, винтовые, цилиндрические, сферические, плоскостные.
Т аблице
1.2 - Основные
типы звеньев механизмов
аблице
1.2 - Основные
типы звеньев механизмов
П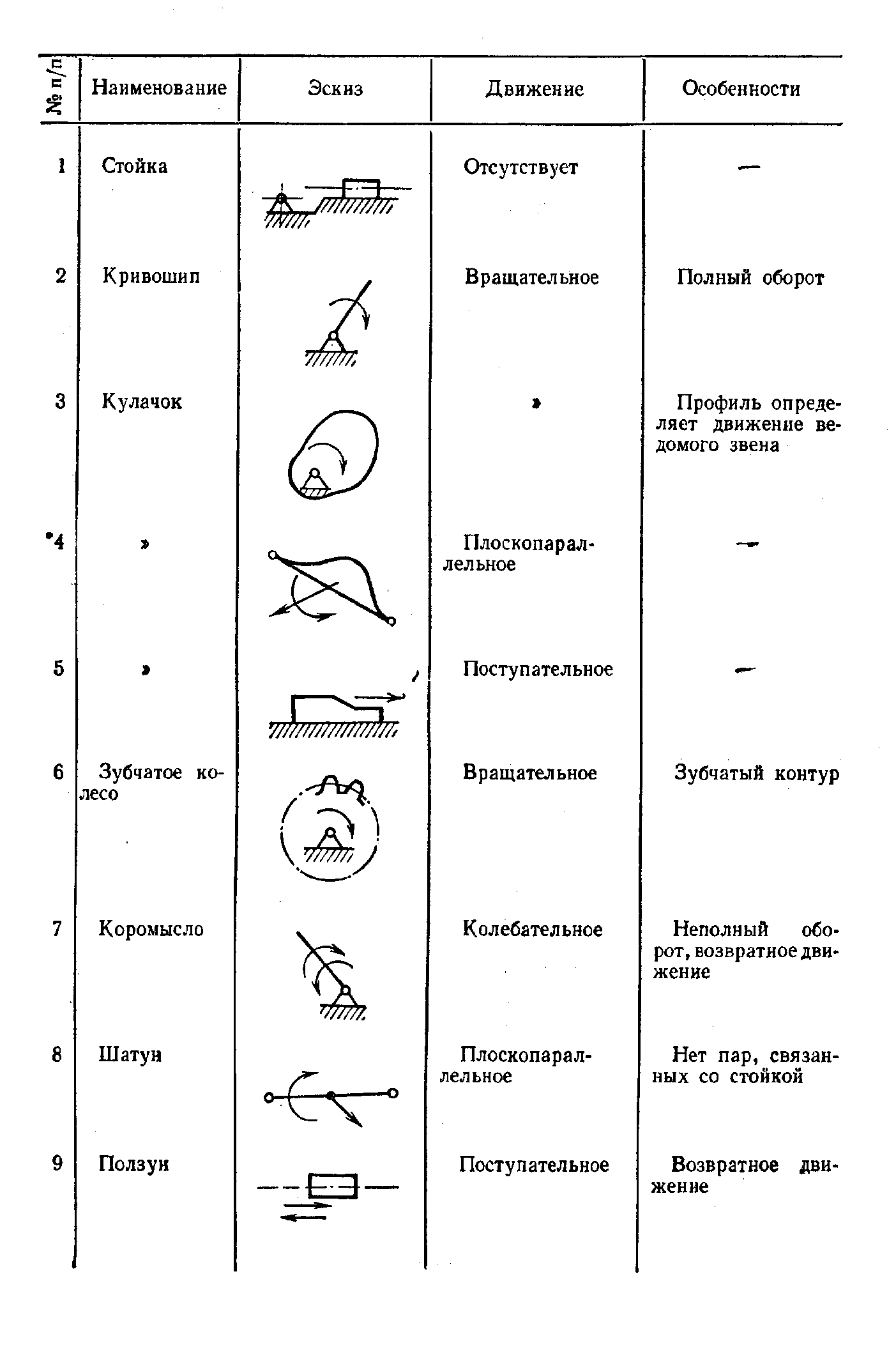
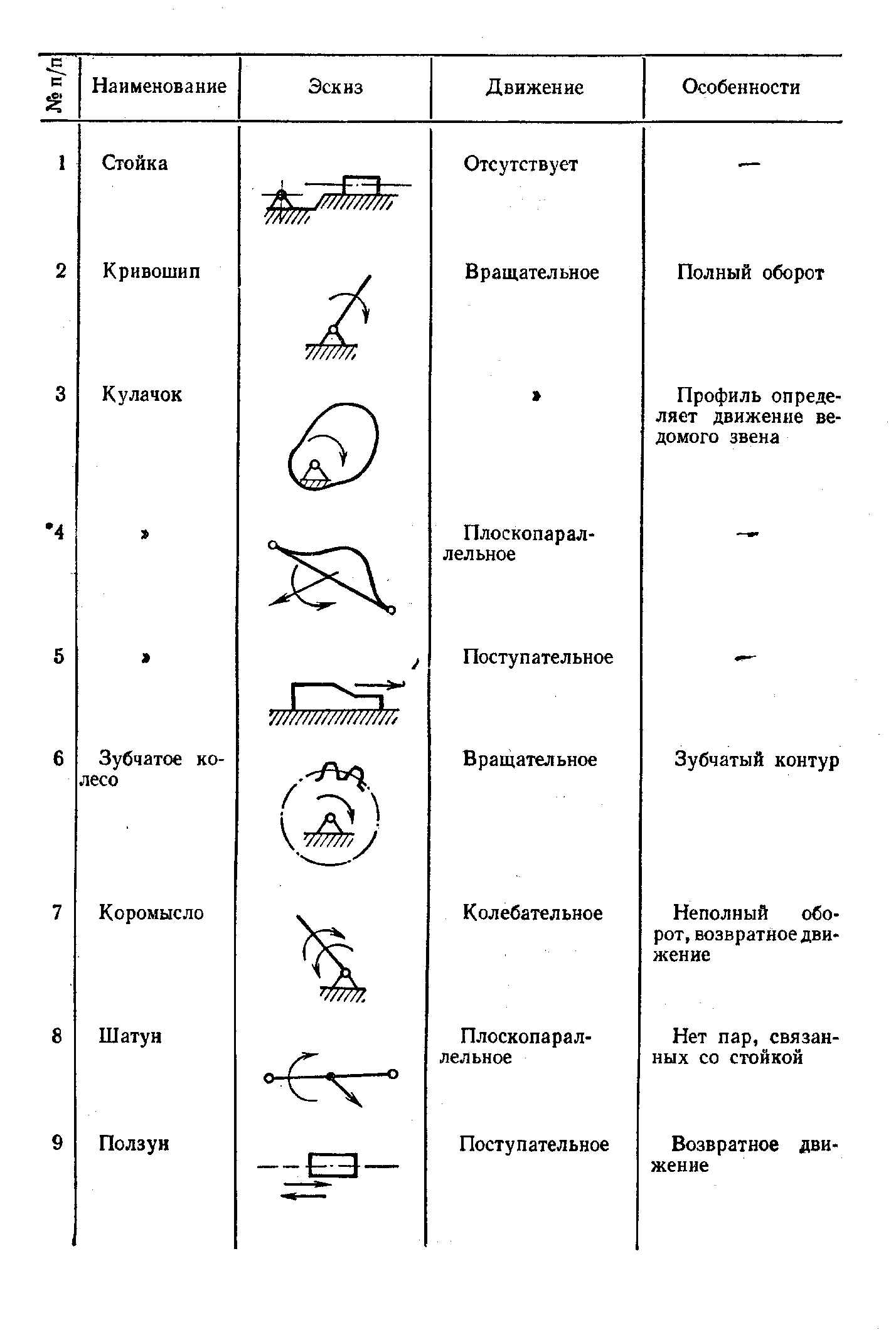
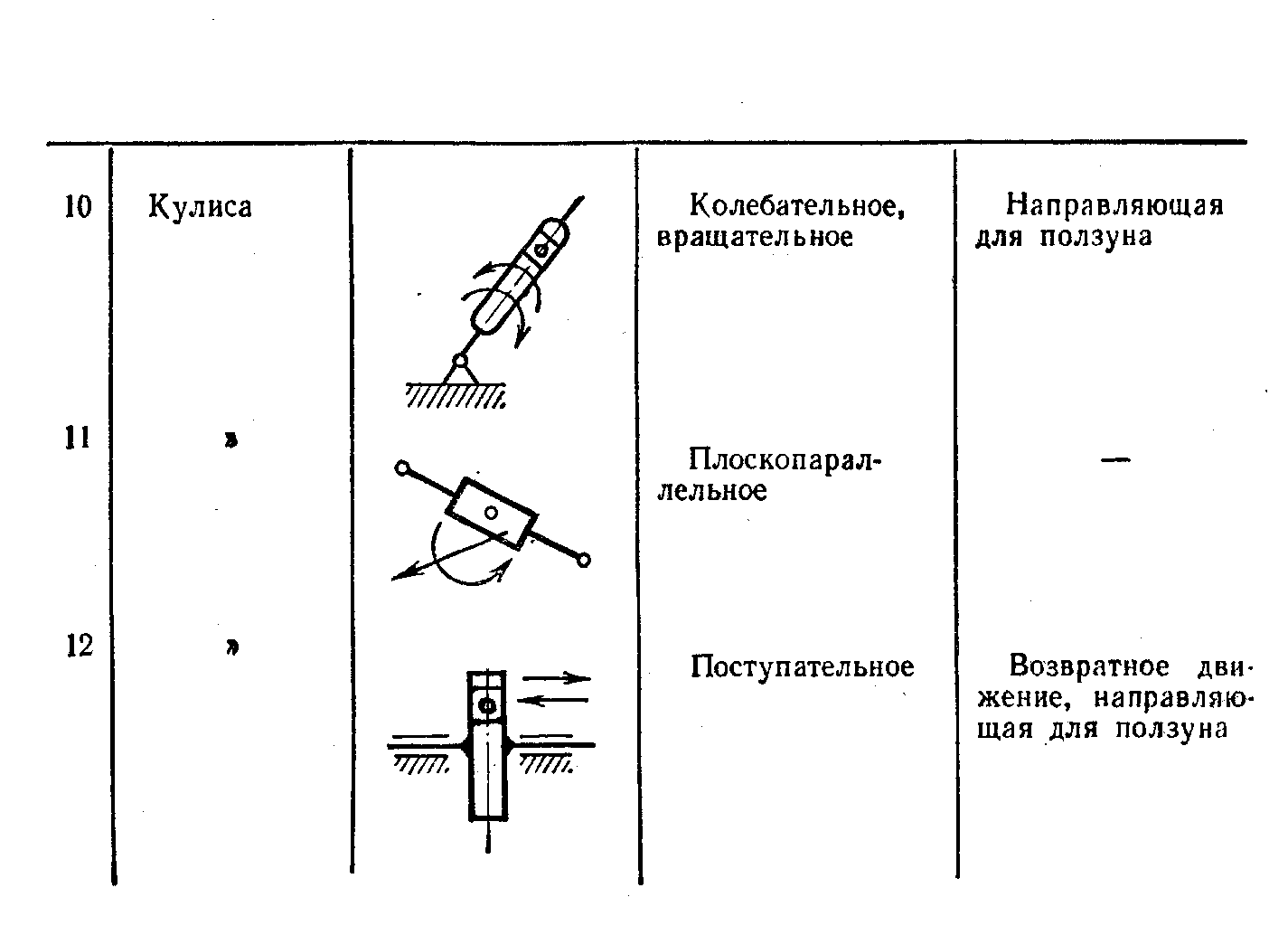 родолжение
таблицы 1.2
родолжение
таблицы 1.2