

Рекомендации по защите эвс от вибрационных воздействий:
Уменьшение внешних вибрационных воздействий возможно только при виброизоляцииции блока. При этом параметры вибрации блока могут быть снижены на 1...2 порядка по сравнению с возмущающим воздействием.
Устанавливать блок без виброизоляторов целесообразно при действии вибрации в течении 10…20% времени от общего времени эксплуатации устройства.
Виброизоляция ЭВС.
Число степеней свободы определяется количеством координат, необходимых для однозначного задания положения объекта в пространстве.
Для реальной системы предполагаем:
Массивные элементы не деформируются и деформируемые элементы не имеют массы.
Деформируемые элементы системы не имеют массы.
Классификация сил в системе виброизоляции.
Существует 3 вида сил, действующих внутри и вне системы:
Восстанавливающие силы.
Диссипативные (рассеивающие) силы.
Вынуждающие силы.
Восстанавливающие силы.
Статическое нагружение.
Восстанавливающие силы системы виброизоляцииции- это силы, возникающие в связи с отклонением системы от положения равновесия и стремящиеся вернуть систему в это положение равновесия. Для системы амортизации типичным видом таких сил являются силы упругости, возникающие при деформации амортизаторов. Для определения этих сил используются соответствующие характеристики амортизаторов.
Для определения сил упругости используются статические характеристики амортизаторов.
|
|
Р - сила q- деформация А - рабочая точка |

При установлении блока на амортизаторы, каждый из них испытывает определенную номинальную нагрузку и эта номинальная нагрузка Рномвызывает определенную номинальную деформацию амортизаторов, соответствующая точка на кривой - рабочая точка амортизаторов.
|
|
А - рабочая точка - положение равновесия системы. |
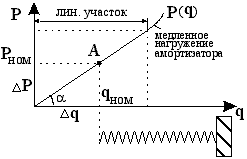
Характеристика
упругого элемента P(q)
- это статическая характеристика
амортизатора. Она может быть построена
при его медленном нагружении. По ней
можно определить статическую жесткость
амортизатора, ,
причем для линейного участка
,
причем для линейного участка ,
т.е. тангенсу угла наклона характеристики.
,
т.е. тангенсу угла наклона характеристики.
Для нелинейной характеристики жесткость вычисляется таким же образом.

Динамическое нагружение.
Восстанавливающие силы системы виброизоляцииции- это силы, возникающие в связи с отклонением системы от положения равновесия и стремящиеся вернуть систему в это положение равновесия. Для системы виброизоляцииции типичным видом таких сил являются силы упругости, возникающие при деформации амортизаторов. Для определения этих сил используются соответствующие характеристики амортизаторов.
При
вибрационных нагрузках происходит
перемещение рабочей точки в относительно
небольших участках А0 .
Жесткостные
свойства опоры при этом определяются
динамической жесткостью. Область
перемещения определяется амплитудой
вибрационных воздействий. Во время
быстрых перемещений точка движется не
по кривой P(q),
а по петеле гистерезиса, построенной
следующим образом: касательная в рабочей
точкеP(q) -
большая ось петли. Площадь петли
характеризует работу рассеивания. Для
характеристики динамической жесткости
при вибрационных нагрузках принимают
тангенс угла наклона большей оси петли
гистерезиса к осиq- ,
т.е. Сg~tg
,
т.е. Сg~tg .
.
Следовательно,
для нелинейных характеристик Cgсущественно отличается от С,tg >tg
>tg ,Cg>C
,Cg>C динамическая жесткость больше, чем
статическая.
динамическая жесткость больше, чем
статическая.
В практических расчетах значение Cgприведены в соответствующих экспериментально полученных графиках для конкретного типа амортизаторов. Даже для линейных участков часто принимают Сg= (1,1 … 1,3)С .
Определение статической и динамической жесткости системы виброизоляцииции.
|
|
Для амортизаторов, которые часто бывают телами вращения, приняты главные направления. |
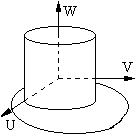
Главные направления- это такие направления осей, деформация вдоль которых вызывает деформацию только вдоль этого направления.
Жесткостные параметры амортизатора задаются также вдоль главных направлений, т.е. необходимо задать Cu,Cw,Cv. Если амортизатор - тело вращения, тоCu=Cv>Cw, аналогично задается и динамическая жесткостьCgu,Cgw,Cgv, причемCgu=Cgv>Cgw.
Амортизаторы устанавливаются в системе и ориентируются как правило таким образом, чтобы их главные направления были параллельны осям блока.
|
|
U||X;W||Z;V||Y. Направление оси Wамортизатора совпадает с действием статической нагрузки. | |
|
В дальнейшем оси координат будут обозначаться 2-мя буквами: Z-W;Y-V;X-U.
|
| |


Для системы виброизоляцииции, в которой существует nамортизаторов, справедливо:
|
|
|


Эти значения Cgопределяют жесткостной параметр системы, характеризующей поступательное движение блока: т.е. эти динамические жесткости определяют колебание блока вдоль координатZ-W;Y-V;X-U.
Поворотные жесткости системы виброизоляциицию.
Данный пример - поворот вокруг оси Х.
|
|
Мх- момент закручивания блока вокруг оси Х.
Zi,Yi- координаты установки амортизатора (плечи приложения усилий, создающих моменты).
|

 -
угол поворота.
-
угол поворота.
 Zi- деформация блока вдоль осиZ.
Zi- деформация блока вдоль осиZ. Zi=Yi*
Zi=Yi* (ввиду малости угла).
(ввиду малости угла).Данная деформация вызывает вертикальную реакцию Fwi . Одновременно амортизаторы деформируются и в горизонтальной плоскости:
 Zi=Zi*
Zi=Zi* (ввиду малости угла) - Это вызывает
горизонтальную реакциюFvi
.
(ввиду малости угла) - Это вызывает
горизонтальную реакциюFvi
.
Усилие- произведение жесткости на деформацию.

Можно рассчитать моменты:

Общий момент от 4-х амортизаторов:
Расчет поворотных жесткостей.
|
|
Схема отображает все компоненты, необходимые для ее определения. |
|
|
Моменты, препятствующие повороту, возникают в плоскости ZY. |
|
|
Препятствующие моменты возникают в плоскости XZ. |






Поворотные жесткости характеризуют колебательные движения вокруг осей X,Y,Z.
Примечания:
Динамические жесткости системы определяются только параметрами виброизолятора и фиксируются, как только выбран конкретный тип виброизолятора.
Поворотные жесткости при заданном типоразмере виброизолятора могут изменяться конструктором путем изменения координат установки виброизолятора.