

2.4.3. Вибір структури системи керування
Він обумовлений тим, що в загальному випадку така система буде складатися із логічної і динамічної підсистем. Логічна підсистема реалізує алгоритм керування, яким фактично є логічна частина моделі (перехід від однієї операції циклу до іншої), а динамічна підсистема забезпечує керування процесом в період операції або стадії.
Вибір структури керування визначається сформульованою метою керування, класифікаційними ознаками періодичного процесу як об'єкта керування і наявністю необхідних технічних засобів і перш за все первинних вимірювальних перетворювачів для отримання інформації про стан об'єкта.
2.4.4. Синтез алгоритмів керування
Синтез алгоритмів керування включає в себе синтез алгоритмів логічного і динамічного керування. Синтез алгоритму логічного керування здійснюється шляхом переходу від логічної частини моделі до логічної структури системи керування. Число алгоритмів динамічного керування визначається числом стадій, на яких необхідно вирішувати задачу динамічного керування. Можливі кілька варіантів побудови динамічних алгоритмів. В найбільш простому випадку синтез алгоритмів зводиться до відтворення вимог технологічного регламенту, який жорстко задає функцію переходу і відповідно траєкторію переходу об'єкта керування від початкового до кінцевого стану. Якщо технологічний регламент не визначає цю траєкторію, а тільки накладає певні обмеження на характер зміни параметрів, то можливі два варіанти (підходи) до синтезу алгоритмів. Перший - в результаті вирішення задачі оптимального керування; другий - еврістичними методами з використанням досвіду кращих операторів періодичних процесів.
/
Синтез системи логіко-динамічного керування здійснюється по частинах, для чого виділяються кола керування (впливу) на кожний виконавчий механізм (ВМ). Функціональна структура таких кіл залежить від виду керування ВМ. Але завжди в цих колах можна виділити блоки формування командних сигналів (КС), керуючих сигналів (КрС), а також блоки вихідних комутаторів (рис. 2.4).
|
|
КС |
|
КрС |
|
сигнали |
Блок форму- |
Блок форму- |
Блок вихідних |
||
Р |
^ |
г |
|||
|
вання |
|
вання |
|
комута- |
|
командних сиг- |
ь |
керуючих сиг- |
ь |
Торів |
Щ |
р |
г |
|||
|
налів |
ь |
налів |
ь |
|
Р |
р |
г |
 Вхідні
ВхідніКС1
. КС2
Керуючі
>■ дії (впливи) Кр С
Кер. впливи1
шшд
Рис. 2.4. Структурна схема логіко-динамічного Рис. 2.5. Формування командних і
керування. керуючих сигналів.
Вхідні і вихідні сигнали кожного блоку можуть приймати тільки два значення (двійкові сигнали), які умовно відповідають 0 або 1.
Командні сигнали задають інтервали часу роботи ВМ в різних режимах. Керуючі -
виражають характер впливу на ВМ: неперервний, періодичний або імпульсний. Вихідні
комутатори вмикають обмотки ВМ до кола живлення при наявності керуючих сигналів.
Наприклад, в процесі автоматичного керування необхідно здійснювати неперервні і
періодичні впливи на ВМ. В цьому випадку необхідно формувати два командних сигнали -
КС1 і КС2, які задають інтервали часу роботи в номінальному режимі і в режимі
короткочасових включень (рис. 2.5). Перший командний сигнал перетвориться в керуючий
сигнал і при відповідному підсиленні за потужністю в керуючу дію, а другий - шляхом
імпульсної модуляції і підсилення за потужністю також в керуючу дію, але імпульсну. При
цьому використовують різні джерела струму: для формування командних і керуючих
сигналів - стабільні джерела постійного струму напругою до 24 В; для формування
керуючих впливів - джерела змінного струму з напругою до 380 В. Тому низьковольтні
блоки формування КС і КрС не повинні мати гальванічного зв'язку з блоками вихідних
комутаторів.
Блок формування командних або керуючих сигналів в загальному випадку можна представити як п,т - полюсник. Він перетворює п послідовностей вхідних сигналів кі,Х2,...хп в щ послідовностей вихідних сигналів уі,У2,...ут.
1-І
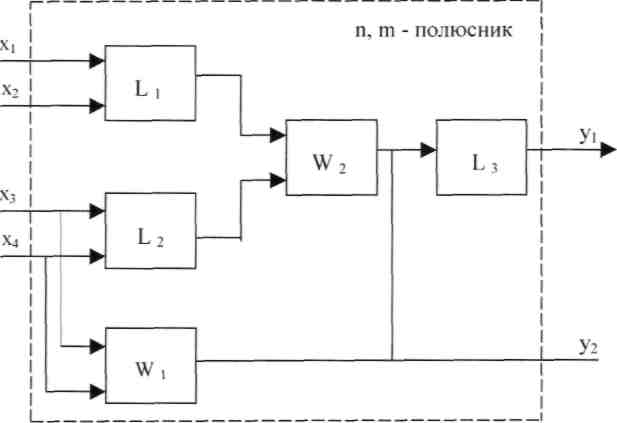
Рис. 2.6. Представлення систем керування у вигляді багатополюсника.
Такий ( п, т) - полюсник можна представити у вигляді логічної сітки, яка містить комбінаційні і часові оператори. Комбінаційні Ь ьЬг, Ьз відображають логічний зв'язок між вихідними і вхідними сигналами, який записується з допомогою булевої алгебри. ► (табл. 2.2). Часові оператори \¥ь \^2 відображають залежність між вхідними і вихідними сигналами сигналами за часом.(табл.2.3).
Логічні операції
Таблиця 2.2
Логічний зв'язок між сигналами |
Назва операції |
Умовне позначення |
Графічне зображення |
||
у = а V Ь |
Диз'юнкція |
БІ5 (а,Ь) |
|
|
|
|
АБО |
V ► |
|||
|
|
|
|||
у = а -Ь |
Кон'юнкція |
Соп (а,Ь) |
|
|
|
|
|
►* |
|||
|
|
|
|||
у = а |
Інверсія |
іпу (а) |
|
|
|
а->> |
НІ |
-*» |
|||
|
|
|
|||
Часові операції і оператори
Таблиця 2.3
Часові діаграми вхідних і вихідних сигналів
Назва часових операцій
Умовне позначення часових операторів
Графічне зображення часових операторів
1
^ і_
Затримка
початкдаопгсигналу
О(0->1) а
О(0->1)
Затримка закінчення сигналу
Б(і->0) а
Щ1->0) —►
Виділення початку сигналу
Ішр(О-И) а
1 Ітр
Ь
_п_
Виділення закінчення сигналу
%Ь
->о)
0 Ітр
Збільшення тривалості стану
Ехі ( а)
Ех*
ь^-Г\
V^ ь
Виділення інтервалу між двома станами
Виділення інтервалу Одноканальне
Іпі[(0->і)а-(і->0)ь]
Ьгі(0-И)а
Ш
1 Ш
Ь^
-МИ
а-
V
_гг
Імпульсна модуляція сигналу
Мосі (а)
Мосі
Примітки: 1) символ (0 —>\) означає момент початку сигналу, а символ (1—»0)- момент закінчення сигналу; 2) між двома сигналами можна виділити чотири різних інтервали.
Символічний запис, який буде вказувати послідовність виконання комбінаційних і часових операцій з двійковими сигналами для перетворення вхідних сигналів у вихідні.
/
називається алгоритмом формування командних або керуючих сигналів. Кожном> алгоритму формування вихідного сигналу блоку буде відповідати певна логічна сітка комбінаційних і часових операторів, яку будемо називати алгоритмічною структурою блоку.
Основним завданням синтезу систем логіко-динамічного керування якраз і є визначення алгоритмічної структури блоків формування командних і керуючих сигналів.
В об'єктах періодичної дії використовують нерегульовані виконавчі механізми (ВМ), які працюють в номінальному режимі (режим А)) або в двох режимах - номінальному (Аі) і сповільненому (Аг). Режим А2 використовується для більш точного відпрацювання завдання автоматичною системою. При керуванні електромагнітними клапанами і електричними двигунами з однією швидкістю обертання такий режим може здійснюватися короткочасними вмиканнями.
В загальному випадку для керування ВМ періодичних об'єктів необхідно формувати командні сигнали режимів Аь Аг, а також В і (включення - рух вперед), Вг - рух назад. При цьому керуючий сигнал може бути неперервним, періодичним або імпульсним.