

2. Измерение массового расхода топлива. Расходомер арт-2м
Расход топлива является одним из важнейших показателей экономичности двигателя и транспортного средства (например, автомобиля) в целом. По целому ряду причин промышленные средства измерения (СИ) расходов не могут непосредственно использоваться для измерения расхода топлива в ДВС.
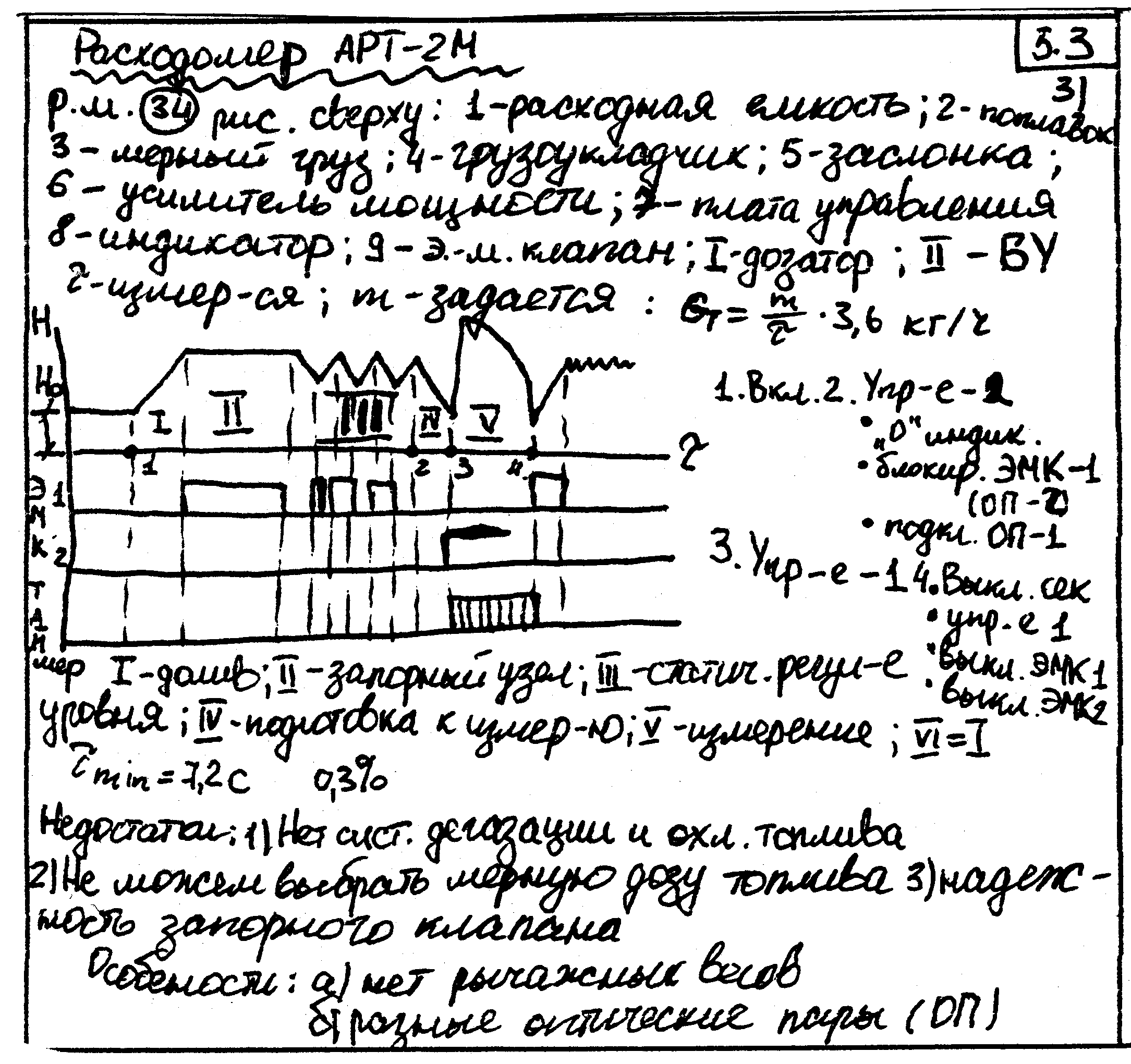
Основные элементы, их назначение, принцип работы. Что задаётся и что является мерой расхода? Что происходит при включении кнопки «Замер»? Что управляет доливом топлива, а также началом и концом измерения? Начало и конец измерения: что происходит в эти моменты? Временная диаграмма работы расходомера. Основная погрешность. Минимально допустимое время измерения и максимальный расход топлива. Определить значение времени измерения на режиме минимальной частоты вращения холостого хода, если расход топлива составляет 2 кг/ч.
В лаборатории ЛД-3 в качестве штатного СИ расхода топлива используется массовый расходомер АРТ-2 косвенного измерения. Принцип его работы заключается в измерении времени расходования известной массы топлива. Его описание приводится в работе МУ л/р. Применяемый метод измерения относится к методам сравнения, а точнее – к его разновидности – методу замещения.
Методом замещения называется метод сравнения с мерой, в котором измеряемую величину замещают известной величиной, воспроизводимой мерой. В данном случае это означает, что масса израсходованного топлива замещается массой груза, значение которой известно с высокой степенью точности. Таким образом, в этом случае реализуется первый вариант измерения, т.е. m – задано, - измеряется.
3. Индицирование двс. Конструкция пьезокварцевого датчика
Элементарная схема и основные элементы.
Вариант с нагруженной мембраной. В простейшем случае пьезодатчик состоит из 2х пластин (1), зажатых в обкладках, одной из которых является нижняя опора (3), а роль другой выполняет торец регулировочной (натяжной) гайки (4). Между пластинами (1) помещается металлический электрод (2), который служит для включения датчика в схему преобразователя посредством электрода (5). Второй электрод образует корпус (6), с которым контактируют (в данном случае) отрицательные стороны пластин пьезоэлемента (верхняя пластина – через натяжную гайку (4)), а нижняя – через опору (3), которая через мембрану (7), защемлённую в корпусе (6). Пластина (1) подбирается таким образом, чтобы при их сжатии силой давления на гранях, соединённых с одноимённым электродом, возникали бы заряды одного знака. С помощью гайки (4) осуществляется предварительное натяжение мембраны (7), что создаёт преднатяг кварцевых пластин (1).
Нарушение линейности характеристики датчика и способ её устранения. Как это реализуется в современных датчиках?
Нарушение линейности характеристики происходит вследствие перераспределения передаваемого усилия между столбиком кварцевых пластин и корпусом датчика. Это сопровождается, как правило, увеличением чувствительности с увеличением нагрузки. Причиной этого могут быть элементы в силовой цепи датчика, имеющие переменную жесткость, а именно резьбы, опоры контакта пластин и т.д. Их жесткость увеличивается с увеличением усилия, и после некоторого значения последнего остаётся постоянной. Кроме того, в области малых нагрузок аналогичное явление происходит и с пьезомодулем самого кварца.
Для устранения указанных явлений в кинематической цепи датчика применяют преднатяг усилием, превосходящим значение Рн. В данной простейшей схеме преднатяг осуществляется нагружением мембраны (7), за счёт упругости (упругой деформации) которой создаётся усилие преднатяга Рн.
Температурная чувствительность датчика: причины её появления. Каким образом температурная чувствительность отражается на результатах измерения давления в цилиндре в различных частях рабочего цикла? На результатах измерения каких показателей это отражается? Какими конструктивными мероприятиями устраняется или существенно уменьшается влияние температуры в современных пьезокварцевых датчиках?
Деформации ТР, вызванные изменением температуры имеют тот же порядок, что и деформации, вызванные изменением давления. В связи с этим необходимо конструктивная и (или) схемная температурная компенсация ТР в сочетании с охлаждением датчиков. Температура газов, омывающих мембрану со стороны цилиндра, за время одного цикла, меняется в широких пределах (от 300 до 25000С). При этом различают 2 вида температурного воздействия: явление прогрева и циклические колебания. Вследствие колебаний температуры возникает температурная погрешность. Эта погрешность будет переменной по величине, а иногда и по знаку. Радикальным средством устранения температурных помех является: 1. Вынесение упругого элемента датчика из зоны, подверженной действию высоких температур. 2. Эффективное охлаждение датчика с применением т.н. разделительной мембраны, имеющей малую жесткость.
№ 17