

1. Электрические тормоза на базе асинхронных машин (ам)
Электрические тормоза представляют собой электрические машины в балансирном исполнении (как правило), вал которых соединён с валом испытуемого ДВС. Механическая энергия двигателя в таких тормозах преобразуется в электрическую. Для АМ характерны конструктивная простота, невысокая стоимость, высокая эксплуатационная надёжность при минимальном обслуживании. Однако они уступают МПТ по возможности регулирования скоростного режима и пуска.
Основные элементы АМ и их назначение.
Машины переменного тока, используемые для испытаний ДВС, являются, как правило, асинхронными машинами (АМ). АМ состоят из неподвижной части – статора и подвижной – ротора. Сердечник статора – полный цилиндр из отдельных листов э/т стали толщиной 0,5 мм. Листы изолированы друг от друга. На внутренней поверхности статора в пары укладывают обмотку. Сердечник закрепляют в корпусе.
Варианты исполнения ротора АМ.
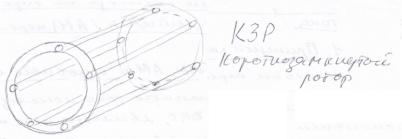
Роторы АМ выполняют 2х видов: с короткозамкнутой обмоткой и с фазной обмоткой. Первый тип называется короткозамкнутый (КЗ) АМ, второй тип – АМ с фазным ротором (ФР). Конструкция ротора КЗ АМ имеет обмотку, подобную «беличьему колесу», т.е. набор стержней, объединённых на концах кольцами (это многофазная обмотка с числом фаз, равным числу стержней).
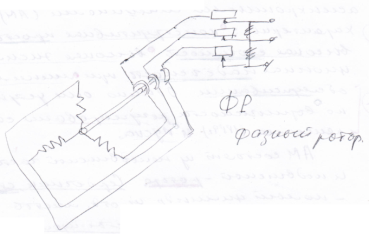
В АМ с фазным ротором в паре ротора укладывают 3х фазную обмотку, аналогично обмотке статора. Обмотку соединяют в звезду, а 3 вывода от неё подключают к контактным кольцам, расположенным на валу АД. Кольца изолированы друг от друга и от вала АД. К этим кольцам через неподвижные щётки подключают пусковой или регулировочный реостат.
Принцип работы АМ. Синхронная частота вращения и факторы, влияющие на неё.
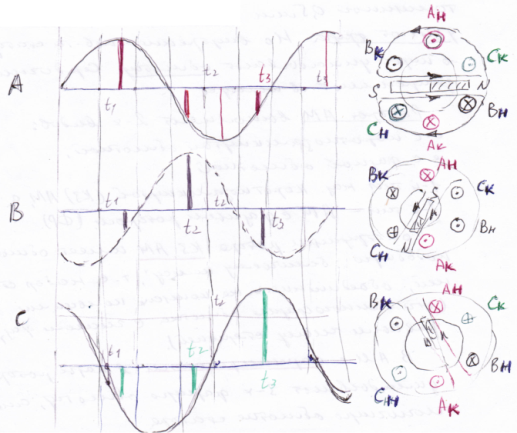
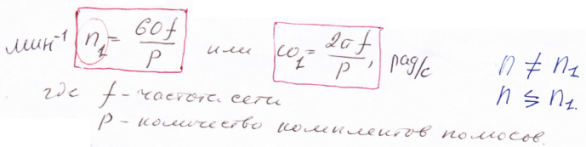
Принцип действия АМ основан на том, что при подключении 3х фазной обмотки статора к 3х фазной сети протекающие по обмотке токи создают вращающееся магнитное поле. Частота вращения этого поля n1 называется синхронной.
Магнитный поток при своём вращении пересекает проводники обмотки ротора и индуцирует в них ЭДС. Т.к. обмотка замкнута, то в ней возникает ток, активное сопротивление которого будет совпадать по направлению с ЭДС.
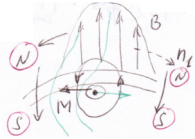
Ток, взаимодействия с магнитным полем, создаёт вращающий момент, который приводит ротор во вращение (режим АД).
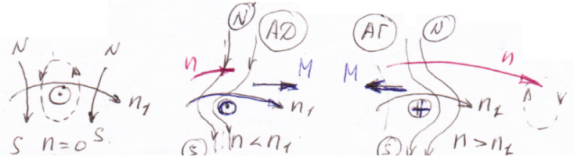
Скольжение АМ. Схема взаимодействия магнитного поля статора с током якоря при работе АМ в режиме асинхронного двигателя (АД) и асинхронного генератора (АГ). Частота ЭДС, индуцируемой в обмотке ротора.
Для АД характерно несинхронное вращение его ротора с магнитным полем.
![]()
Легко показать, что частота ЭДС, индуцируемой в обмотке ротора:
![]()
На номинальной частоте вращения АМ скольжение составляет S = 1,5…5,0%. Номинальная частота вращения зависит от n1 (частота вращения магнитного поля) и не может быть выбрана произвольно. АМ может работать в режиме электротормоза (генераторном режиме). Это возможно в том случае, если ротор будет принудительно вращаться от постоянного источника со скоростью, большей скорости магнитного поля (отрицательное скольжение ω > ω1). Итак, ω < ω1 – режим АД S > 0; ω > ω1 – режим АГ S < 0. Т.о. номинальное значение частоты вращения в режиме АД и в режиме АГ различны.
Механическая характеристика АМ (объясните закономерности её протекания). Её соответствие характеристике испытуемого ДВС.
С ростом S вращающий (или тормозной) момент АМ должен возрастать. Т.к. этот момент создаётся за счёт разности частот магнитного поля статора и ЭДС якоря. Т.о. скорость АМ изменяется с изменением нагрузки. Эта зависимость носит довольно жесткий характер, что в целом удобно для использования АМ в качестве тормозной установки для испытаний ДВС.
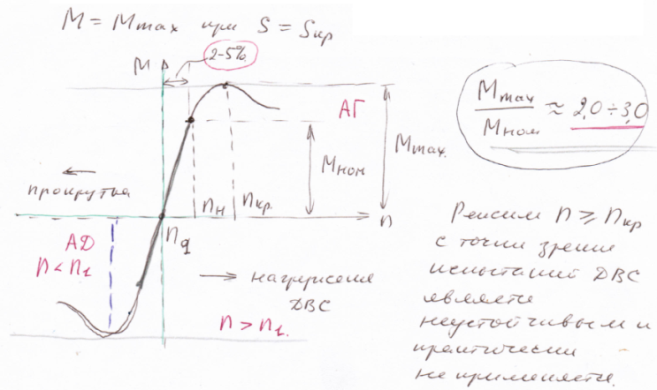
Однако с ростом S (увеличением частоты вращения) увеличивается индуктивное сопротивление ротора, что приводит к уменьшению активной составляющей тока, несмотря на увеличение полного тока.
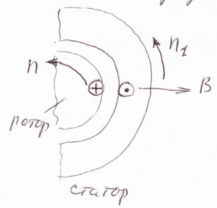
АМ в режиме генератора АГ может работать как параллельно с сетью, так и на автономную нагрузку. В любом случае, для этого необходимо, чтобы частота вращения вала ротора, приводимого от постороннего источника (ДВС) и вращающемого в ту же сторону, в которую вращается магнитное поле статора, превысила бы синхронную частоту вращения n1.
Т.к. n > n1, то направление вращения магнитного потока статора относительно ротора меняется на обратное.
Направление перемещения магнитного поля относительно проводников статора и ротора в этом случае противоположны. Индуцируемые в них ЭДС будут иметь разные знаки.
2. Измерение частоты вращения. Цифровые измерительные системы 2-го рода
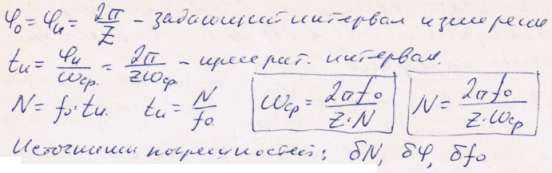
В основе работы ЦИС-2 лежит измерение временного интервала tu, задаваемого ДПУ, путём заполнения этого интервала импульсами выходной частоты f0 от внешнего опорного генератора (ОГ).
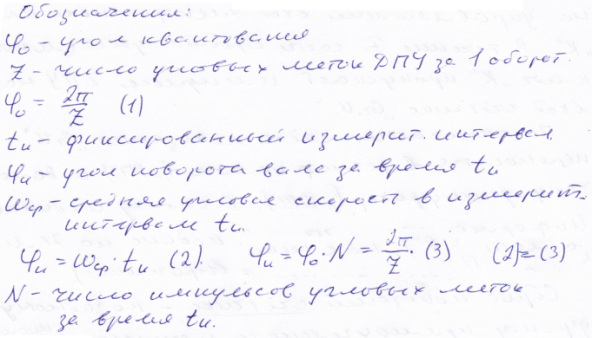
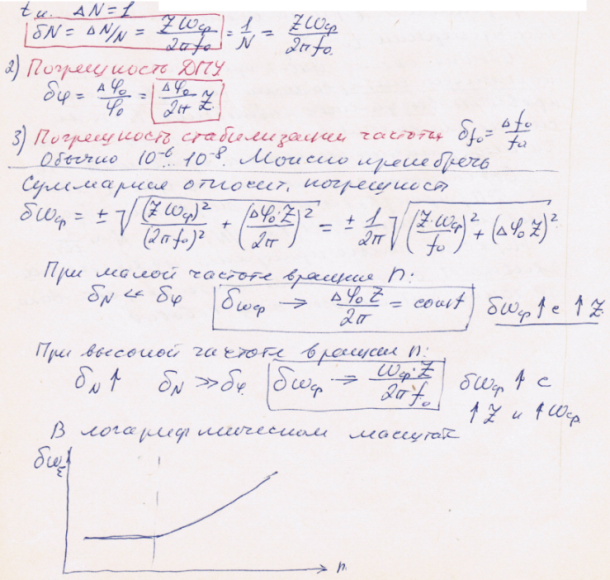
Основные погрешности ЦИС-2 при измерении средней угловой скорости: источники погрешностей (2) и их выражения. Выражение для суммарной относительной погрешности измерения средней угловой скорости (ср). Зависимость ср от средней угловой скорости (ср), числа штриховых меток (z), частоты опорного генератора (f0) и от погрешности кодовых меток (0).
1. Погрешность квантования. Измерительный интервал tu дробиться высокочастотными импульсами ОГЧ. Характер образования δN аналогичен его появлению в ЦИС-1. Начальные и конечные точки импульсов с периодом T0 = 1/f0 будут случайным образом размещаться в пределах измерительного интервала
3. Индицирование ДВС. Измерение сигнала пьезоэлектрических индикаторов
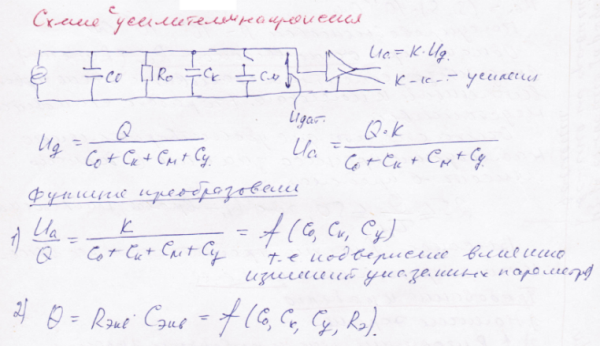
Основные недостатки схемы с усилителем напряжения.
Включается без обратной связи с большим коэффициентом усиления. При большом усилении постоянного тока требуется большое входное сопротивление. С увеличением напряжения увеличивается начальная аддитивная погрешность. Здесь накладываются погрешности ёмкости кабеля и масштабной ёмкости, которые снижают выходной сигнал. Постоянная времени тоже будет подвержена влияниям
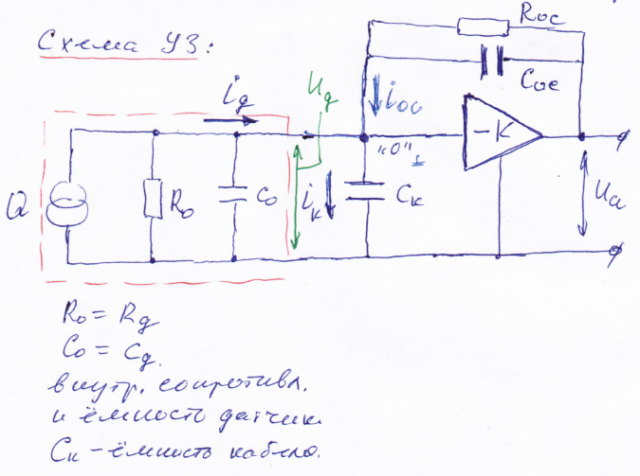
Схема с усилителем заряда: принципиальная схема включения пьезодатчика.
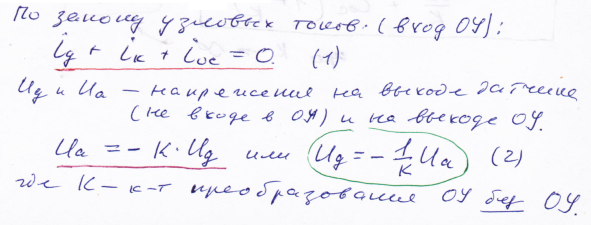
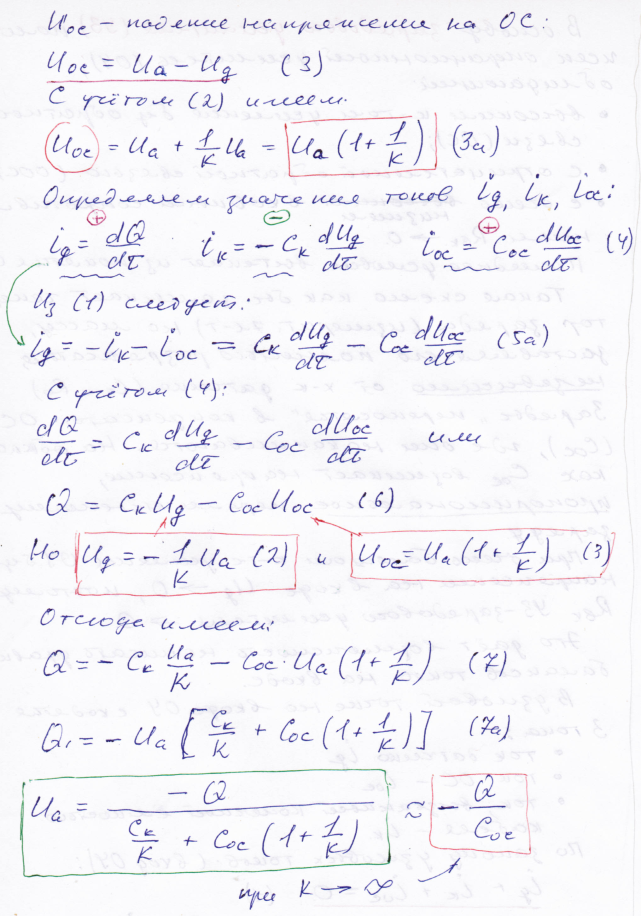
Каким требованиям в этом случае должен удовлетворять усилитель? Каким должно быть его входное сопротивление? Основные уравнения, описывающие поведение этой схемы(3)? Уравнения, описывающие поведение этой схемы. Функция преобразования и постоянная времени. Каким способом в этом случае можно изменять масштаб регистрации? Основные преимущества данной схемы.
№ 11