

Наведіть класифікацію асктп за різними ознаками. Охарактеризуйте кожну групу системи.
По принципу управления:
1)Управления по задающему воздействию. В такой системе подается информация о заданном значении регулируемого параметра. Характерна разогнутая цепь управления т.е. управляющее устройство оказывает воздействие на обькт управления, но нет обратного воздействия.
Структурная схема управления по задающему воздействию.

Достоинство: простота реализации
Недостатки: необходимо идеальное знание обьекта управления и его предсказуемое поведение.
2)Управление по возмущающему воздействию. Кроме информации о цели управления используется информация о возмущающих воздействиях. Задача обьекта управления: сформировать такое управляющее воздействие, которое бы компенсировало возмущающее воздействие.
Структурная схема управления по принципу компенсации.
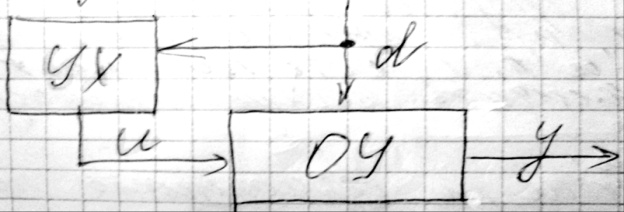
Достоинства: быстродействие и возможность полной компенсации
Недостатки: необходимо идеальное знание системы.
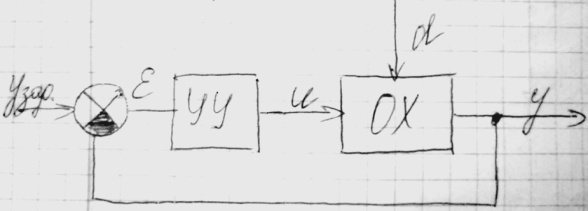
3)Управления по отклонению. Используется информация о цели управления и отклонения текущего значения регулируемого параметра от заданного. Осуществляется на основе информации об обьекте управления.
Структурная схема управления по отклонению.
 ошибка
регулирования, т.е. отклонение текущего
или действительного значения регулируемого
параметра от заданного значения.
ошибка
регулирования, т.е. отклонение текущего
или действительного значения регулируемого
параметра от заданного значения.
Входным
сигналом в УУ является
 .
.
Достоинства: учитываются все возмущающее воздействия, требуется минимальная информация об обьекте управления.
Недостатки: присутствует запаздывание управления. Возможны колебательные процессы, параметры управления подберают экспериментально.
4)Комбинированное управление. В случае необходимости высокой точности регулирования используются совместно управления по возмущению и отклонению.
По характеру изменения задающего воздействия.
1)В системах автоматической реализации Узд=const, т.е. заданное значение t необходимо поддерживать на одном и том же значении всего технологического процесса.
2)В
системе программного управления Узд= ,
т.е. значения температуры необходимо
менять по какому-то закону во времени,
либо необходима реализация строгой
последовательности действий управления.
,
т.е. значения температуры необходимо
менять по какому-то закону во времени,
либо необходима реализация строгой
последовательности действий управления.
По способу организации: непрерывные, циклические и периодические.
По виду зависимости установившейся ошибки регулирования от внешнего воздействия: статическая, астатическая.
88
Види перехідних процесів в АСР, наведіть їх характеристику?
Нарушения равновесных режимов в АСР происходят под влиянием различных факторов, например, управляющего воздействия, направленного к регулятору от задатчика, или возмущающего воздействия приложенного к объекту регулирования. Системы регулирования ведут себя по отношению к этим воздействиям существенно различным образом. В то время как управляющее воздействие определяет величину и направление изменения регулируемого параметра, возмущающее воздействие не должно существенно влиять на изменение регулируемых параметров
Виды
переходных процессов в АСР при единичных
ступенчатых воздействиях
 и
и
 (Рис. 1.6)
(Рис. 1.6)
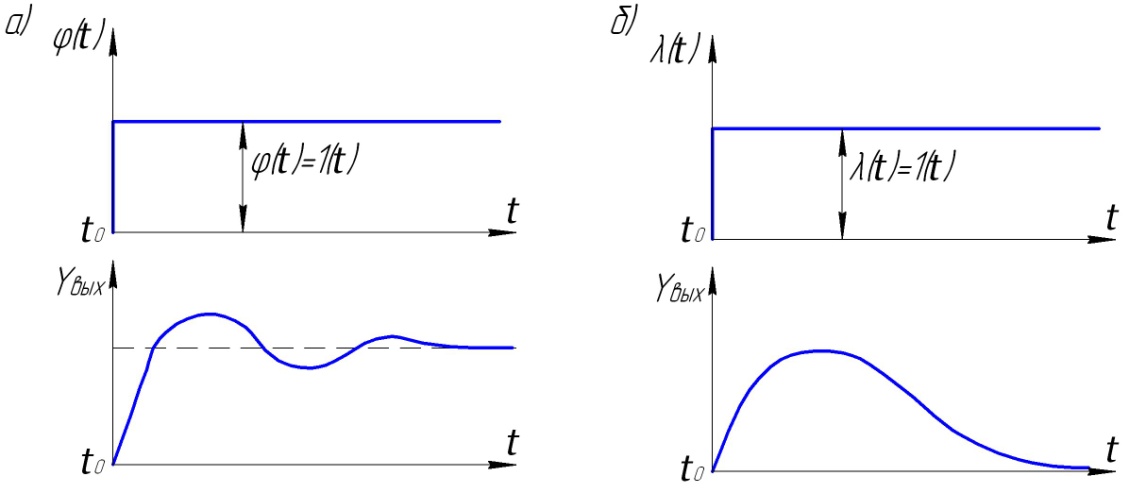
Рис. 1.6 Переходные процессы в устойчивых АСР.
а) – при управляющем воздействии, б) – при возмущающем воздействии.
Для
устойчивых АСР переходные процессы
сходящиеся, т.е.
 стремится к заданному значению или
возвращается к прежнему. В неустойчивых
АСР переходные процессы расходящиеся:
регулируемый параметр отклоняется от
своего заданного значения на большую
величину с возрастающей скоростью (Рис.
1.7,а)
стремится к заданному значению или
возвращается к прежнему. В неустойчивых
АСР переходные процессы расходящиеся:
регулируемый параметр отклоняется от
своего заданного значения на большую
величину с возрастающей скоростью (Рис.
1.7,а)
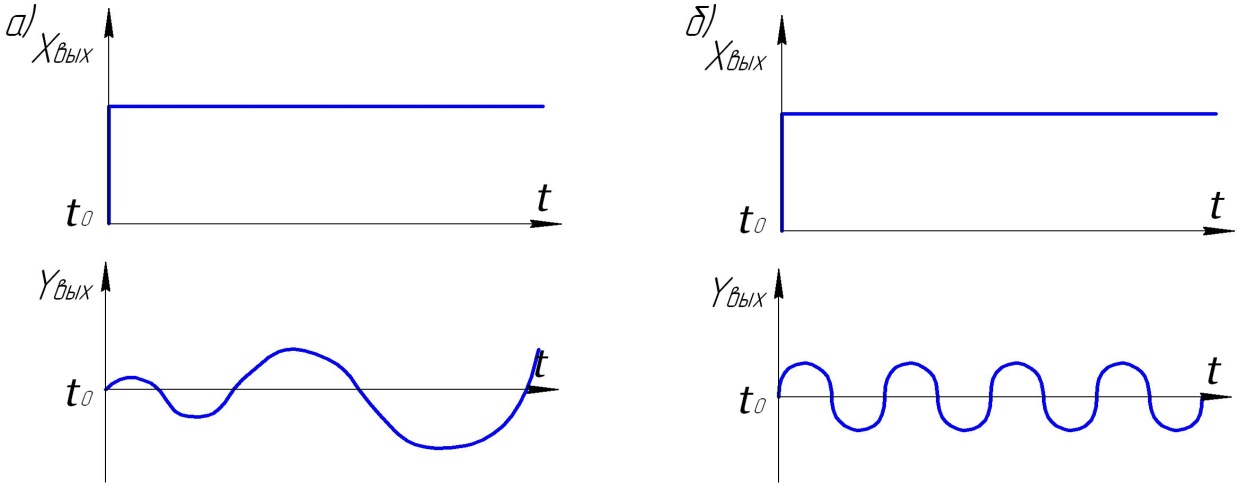
Рис. 1.7 Переходные процессы в АСР: а) неустойчивых, б) находящихся на границе устойчивости.
АСР
может находится на границе устойчивости,
когда регулируемый параметр не принимает
заданного значения и его отклонения
имеет постоянную амплитуду отклонения
от заданного значения (Рис. 1.7,б). При том
или ином воздействии требуемые и
действительные значения регулируемой
величины могут отличаться друг от друга.
Разность между заданным
 и действительным значением регулируемой
величины
называется ошибкой регулирования.
и действительным значением регулируемой
величины
называется ошибкой регулирования.
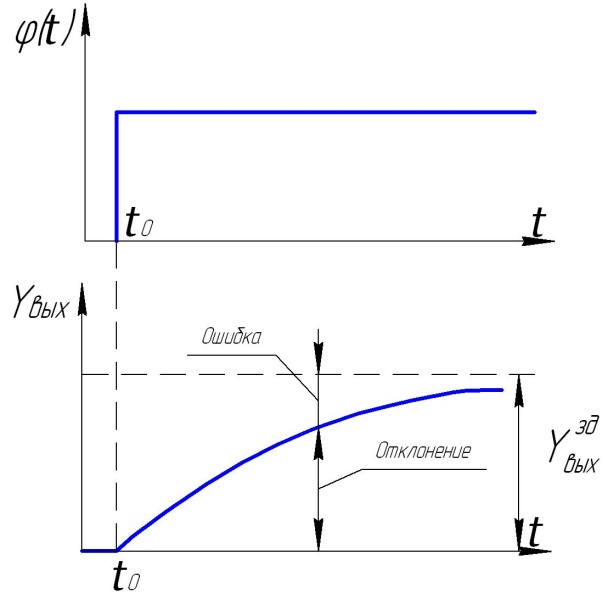
Рис. 1.8 Ошибки и отклонения для АСР.
Отклонением регулируемой величины называется разность между значением регулируемой величины в данный момент времени и некоторым фиксированным ее значением, принятым за начало отсчета. Различают динамическую ошибку и отклонение в переходных процессах и ошибку и отклонение в равновесных режимах - статическая ошибка, отклонение.
|
|
|
|
89
Статичні регулятори. Принцип дій.
Статическая система регулирования, система автоматического регулирования, в которой погрешность в установившемся состоянии в общем случае
не равна нулю и зависит от величины нагрузки на объект. На рис. 1 представлена схема одноконтурной Статическая система регулирования, состоящей из объекта регулирования и устройства управления, куда входят измерительный преобразователь, регулятор и исполнительный механизм. На объект регулирования действуют управляющее воздействие x2(t) и внешние возмущения f (t). Регулируемая величина объекта регулирования x (t) преобразуется измерительным преобразователем в сигнал x*(t), который подаётся на регулятор, где сравнивается с заданным значением управляющего воздействия g (t), в результате чего образуется сигнал рассогласования m(t) = g (t) - х*(t). Далее в регуляторе задаётся зависимость между m(t) и управляющей величиной регулятора X1(t) - формируется закон регулирования. Для статического пропорционального регулятора X1 = kp m, где kp - коэффициент передачи (усиления) регулятора. Как правило, статические регуляторы относительно просты, экономичны, малоинерционны, поэтому их целесообразно использовать в системах автоматического регулирования промышленных установок. На рис. 2 изображена простейшая Статическая система регулирования уровня жидкости в сосуде. В случае, например, увеличения расхода жидкости уровень её в сосуде понижается, изменяется положение поплавка и задвижка поднимается, увеличивая приток жидкости. Установившееся состояние наступает тогда, когда расход жидкости равен притоку, что соответствует некоторому уровню, отличному от первоначального.

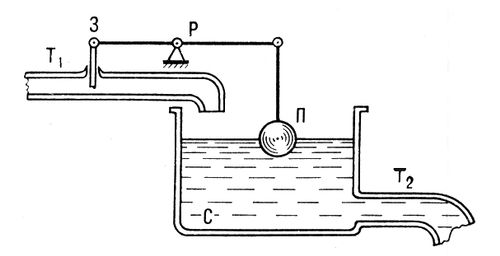
Рис. 2. Простейшая статическая система регулирования: Т1 - входная труба; З - задвижка; Р - рычажная система; П - поплавок; С - сосуд с жидкостью; Т2 - выходная труба.
90
Дайте визначення термінам: тиск, в’язкість?
У этого термина существуют и другие значения, см. Давление (значения)
|
|
А)Давле́ние— физическая величина, численно равная силе F, действующей на единицу площади поверхности S перпендикулярно этой поверхности. В данной точке давление определяется как отношение нормальной составляющей силы , действующей на малый элемент поверхности, к его площади:
Среднее давление по всей поверхности есть отношение силы к площади поверхности:
Давление характеризует состояние сплошной среды и является диагональной компонентой тензора напряжений. В простейшем случае изотропной равновесной неподвижной среды давление не зависит от ориентации. Давление можно считать также мерой запасённой в сплошной среде потенциальной энергии на единицу объёма и измерять в единицах энергии, отнесённых к единице объёма.
Давление является интенсивной физической величиной. Давление в системе СИ измеряется в паскалях (ньютонах на квадратный метр, или, что эквивалентно, джоулях на кубический метр); применяются также следующие единицы:
Б) Вя́зкость (вну́треннее тре́ние) — одно из явлений переноса, свойство текучих тел (жидкостей и газов) оказывать сопротивление перемещению одной их части относительно другой. В результате происходит рассеяние в виде тепла работы, затрачиваемой на это перемещение.
Механизм внутреннего трения в жидкостях и газах заключается в том, что хаотически движущиеся молекулы переносят импульс из одного слоя в другой, что приводит к выравниванию скоростей — это описывается введением силы трения. Вязкость твёрдых тел обладает рядом специфических особенностей и рассматривается обычно отдельно.
Различают динамическую вязкость (единицы измерения: Па·с = 10 пуаз) и кинематическую вязкость (единицы измерения: стокс, м²/с, внесистемная единица — градус Энглера). Кинематическая вязкость может быть получена как отношение динамической вязкости к плотности вещества и своим происхождением обязана классическим методам измерения вязкости, таким как измерение времени вытекания заданного объёма через калиброванное отверстие под действием силы тяжести.
Переход вещества из жидкого состояния в стеклообразное обычно связывают с достижением вязкости порядка 1011−1012 Па·с
Прибор для измерения вязкости называется вискозиметром.
22. В соответствии с агрегатным принципом построения, АСУ ТП должна подразделяться на относительно автономные подсистемы управления отдельными технологическими агрегатами и функциональными группами. В функциональную группу управления (далее – ФГУ) должны входить все средства управления, реализующие информационные и управляющие функции в пределах данного технологического узла. Если техническое или программное средство обслуживает несколько ФГУ, то оно должно относиться к более крупной функциональной группе, объединяющей все обслуживаемые ФГУ.
АСУ в необходимых объемах должна автоматизированно выполнять:
- сбор, обработку и анализ информации (сигналов, сообщений, документов и т. п.) о состоянии объекта управления;
- выработку управляющих воздействий (программ, планов и т. п.);
- передачу управляющих воздействий (сигналов, указаний, документов) на исполнение и ее контроль;
- реализацию и контроль выполнения управляющих воздействий;
- обмен информацией (документами, сообщениями и т. п.) с взаимосвязанными автоматизированными системами.
Состав автоматизированных функций (задач, комплексов задач - далее функций) АСУ должен обеспечивать возможность управления соответствующим объектом в соответствии с любой из целей, установленных в ТЗ на АСУ.
Состав автоматизированных функций АСУ и степень их автоматизации должны быть технико-экономически и (или) социально обоснованы с учетом необходимости освобождения персонала от выполнения повторяющихся действий и создания условий для использования его творческих способностей в процессе работы.
24. Нормирующий преобразователь (НП) служит для взаимного со-гласования входящих в систему управления элементов и дистанци¬онной передачи сигналов по каналам связи.
Максимальное рабочее давление - установившееся максимальное рабочее давление, при котором обеспечивается заданный в нормативном документе расход преобразователя.
21.Время полного запаздывания- это время между нарушением равновесия(т. е. входным воздействием) и началом изменения выходной величины.
Пропускная способность- метрическая характеристика, показывающая соотношение предельного количества проходящих единиц (информации, предметов, объёма) в единицу времени через канал, систему, узел.
23. Основой любой микропроцессорной системы управления является микропроцессор, или вычислитель, предназначенный для обработки дискретных цифровых сигналов и команд управления.
Важнейшим звеном микропроцессорных систем является микроконтроллер, который является сложным техническим устройством, предназначенным для обработки цифровой информации. Обычно МК строится на базе выбранного типа микропроцессора, лучшим образом обеспечивающего требуемые функции микропроцессорной системы в целом.
Контроллер состоит из двух основных частей: ядра и модуля ввода-вывода. Ядро микропроцессорного контроллера составляют микропроцессор, системный контроллер (СК) и устройства памяти. В структуре МК микропроцессор играет главную роль: осуществляет арифметическую и логическую обработку данных, поступающих от внешних устройств (ВУ) системы, и совместно с системным контроллером управляет потоками информации между всеми устройствами МС. Связь микропроцессора с объектом управления осуществляется через УСО и шины системы: шину данных (ШД), шину адреса (ША) и шину управления (ШУ). Подключение УСО к шине данных системы осуществляется через порты ввода-вывода системы, которые обычно входят в состав интерфейса системы. Интерфейс - совокупность программных и аппаратных средств, обеспечивающих обмен информацией между МП и ВУ.
25. Система автоматизации состоит из объекта автоматизации и системы управления этим объектом. Благодаря определенному взаимодействию между объектом автоматизации и системой управления система автоматизации в целом обеспечивает требуемый результат функционирования объекта, характеризующийся параметрами х1, х2, ..., хn.
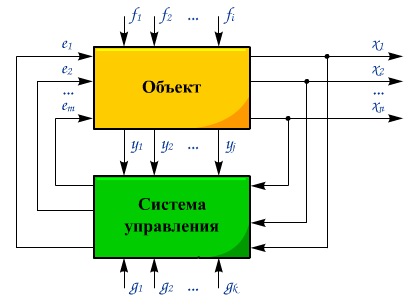
К этим параметрам можно отнести, например, величины, характеризующие целесообразный конечный продукт технологического процесса, отдельные параметры, определяющие ход технологического процесса, его экономичность, обеспечение безаварийного режима и т.д.
Кроме этих основных параметров, работа комплексного объекта автоматизации характеризуется рядом вспомогательных параметров y1, y2,... yi, которые также должны контролироваться и регулироваться (например, поддерживаться постоянными). К такого рода параметрам можно отнести, например, величины, характеризующие работу установок подготовки технологического пара, насосных станций оборотного водоснабжения и т. д.
От этих установок требуется только подача на вход технологической установки сырья и энергоносителей с заданными параметрами. При этом необходимая дозировка подачи сырья и энергоносителей осуществляется средствами управления, относящимися к технологической установке.
Таким образом, объект автоматизации в общем случае состоит из нескольких в большей или меньшей степени связанных друг с другом участков управления. Участки управления физически могут представляться в виде
отдельных установок, агрегатов и т. д. или в виде локальных каналов управления отдельными параметрами одних и тех же установок, агрегатов и т. д.