

34 Назначение и виды корректирующих устройств.
Для того чтобы добиться желаемого качества процесса управления, фактически требуемой точности и качества переходного процесса, существуют два пути. Первый путь – изменение параметров системы управления, и второй путь, – изменение структуры системы, за счет введения дополнительных звеньев. Введение дополнительных, или корректирующих звеньев, применяется в том случае, когда изменением параметров не удается добиться желаемых результатов.
Основная задача корректирующих устройств заключается в повышении точности системы управления и обеспечении желаемого качества переходного процесса.
Различают
четыре основных вида корректирующих
устройств:
последовательные
корректирующие
устройства,
параллельные
корректирующие
устройства, корректирующие устройства
по
возмущающему воздействию
![]() и
неединичные
обратные связи.
и
неединичные
обратные связи.
Последовательные корректирующие устройства включатся последовательно объекту управления в разомкнутую цепь системы.
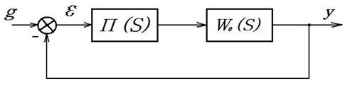 структурная схема
структурная схема
![]() передаточная
функция
передаточная
функция
Корректирующее устройство параллельного типа
Включаются параллельно объекту управления
 структурная
схема
структурная
схема
![]() передаточная
функция
передаточная
функция
Основные виды корректирующих обратных связей следующие:
жесткая обратная связь (ЖОС)
![]() ;
;
инерционная жесткая обратная связь
![]() ;
;
гибкая обратная связь
![]() ;
;
инерционная гибкая обратная связь
![]() .
.
Возможны и более сложные передаточные функции корректирующих обратных связей.
4. Корректирующие устройства по внешнему воздействию.
Внешние воздействия делятся на задающие, сигнал которых система должна воспроизводить, и возмущающие, действия которых нужно нейтрализовать.
5. Неединичная главная обратная связь.
При таком способе, как следует из передаточной функции замкнутой системы, существенно меняется ее характеристическое уравнение, и поэтому нужно следить, чтобы получалось желаемое качество переходного процесса.
Использование того или иного вида корректирующих устройств определяется удобством технического осуществления.
В линейных САУ одинаковые динамические свойства могут быть обеспечены разными видами корректирующих устройств.
35 Общие понятия и основные соотношения частотного метода синтеза.
Частотный метод синтеза основан на формировании желаемых л.а.ч.х. разомкнутых по главной обратной связи систем и соответствующих им передаточных функций, которые однозначно связаны с показателями качества переходного процесса замкнутой системы.
Для
обеспечения наиболее оптимального
соотношения показателей качества
желаемая л.а.ч.х. на частоте среза ![]() должна
иметь наклон
должна
иметь наклон ![]() дБ/дек.
Формирование низкочастотной и
высокочастотной частей желаемой л.а.ч.х.
может быть формализовано для конкретных
частных применений САУ. Варианты
некоторых типовых л.а.ч.х. приведены на
рис. 7.12.
дБ/дек.
Формирование низкочастотной и
высокочастотной частей желаемой л.а.ч.х.
может быть формализовано для конкретных
частных применений САУ. Варианты
некоторых типовых л.а.ч.х. приведены на
рис. 7.12.
Вариантам желаемых л.а.ч.х. соответствуют следующие системы (см. рис. 7.12):
1. Системы, приводимые к колебательному звену (технический оптимум). Желаемая л.а.ч.х. в этом случае имеет вид 1. Уравнения ее передаточной функции и частоты среза имеют вид
|
(7.47) |
 .
.
Здесь ![]() .
При
.
При ![]() имеем
технический оптимум, дающий
перерегулирование
имеем
технический оптимум, дающий
перерегулирование ![]() .
Минимально-возможное время переходного
процесса
.
Минимально-возможное время переходного
процесса ![]() .
.
Подобная структура и приведенные соотношения соответствуют системам стабилизации (либо системе в целом, либо ее внутреннему контуру стабилизации).
2. Астатические системы 2-го порядка (кривая 2). Уравнения передаточной функции и частоты среза имеют вид
|
(7.48) |
 .
.
Если
в такой передаточной функции
обеспечить ![]() и
и ![]() ,
то показатели переходного процесса
будут соответствовать симметричному
оптимуму, при котором
,
но при одинаковой с техническим оптимумом
длительности переходного процесса по
управлению отработка возмущающего
воздействия будет минимальной и
определяться постоянной времени
,
то показатели переходного процесса
будут соответствовать симметричному
оптимуму, при котором
,
но при одинаковой с техническим оптимумом
длительности переходного процесса по
управлению отработка возмущающего
воздействия будет минимальной и
определяться постоянной времени ![]() .
Подобные системы желательно использовать
при сравнительно малых ускорениях
задающих воздействий.
.
Подобные системы желательно использовать
при сравнительно малых ускорениях
задающих воздействий.
3. Астатические системы 1-го порядка (кривая 3). В этом случае уравнения передаточной функции и частоты среза имеют вид
|
(7.49) |
 .
.
Здесь ![]() и
и ![]() определяет
излом л.а.ч.х. на низких частотах
определяет
излом л.а.ч.х. на низких частотах ![]() .
.
Системы
такого плана имеют больший запас
устойчивости по фазе и меньшее
перерегулирование ![]() .
.
4. Структуры статических САУ (кривая 4). Передаточная функция и частота среза определяются выражениями:
|
(7.50) |
 .
.
|
 Рис.
7.12. Варианты типовых желаемых л.а.ч.х.
Рис.
7.12. Варианты типовых желаемых л.а.ч.х.Такие структуры приемлемы для систем, не требующих повышенной точности отработки внешних воздействий.
При
множестве возможных вариантов выбора
параметров передаточных функций
необходимо предварительно оценить
частоту среза
и
допустимое перерегулирование ![]() .
.
Частота
среза однозначно оценивается временем
переходного процесса ![]() и
вычисляется по рекомендованным
зависимостям:
если
и
вычисляется по рекомендованным
зависимостям:
если ![]() ,
то
,
то ![]() при
при ![]() .
.
Для ![]() связь
частоты среза со временем переходного
процесса нелинейна и определяется по
графикам Солодовникова, приводимым в
учебниках по ТАУ.
связь
частоты среза со временем переходного
процесса нелинейна и определяется по
графикам Солодовникова, приводимым в
учебниках по ТАУ.
Остальные параметры желаемой л.а.ч.х. рассчитывают по приближенным зависимостям:
|
(7.51) |
|
(7.52) |
 .
. ,
,
где ![]() .
.
Для
желаемых л.а.ч.х. типа 1 принимают ![]() и
и ![]() .
.
Для
желаемых л.а.ч.х. типа 2 принимают
и ![]() .
.
Без
определения параметра ![]() принимают
и
принимают
и ![]() .
При этом
.
При этом ![]() .
.
Многоконтурные САУ, содержащие кроме главной обратной связи внутренние связи, наиболее распространены. Такие системы целесообразно оптимально синтезировать поконтурно, начиная с внутреннего и кончая внешним. Этот прием получил название подчиненного синтеза САУ.