

§ 4.12 Расчет магнитной цепи с постоянными магнитами
Дано: ГМЦ, материал МЦ (рис 4.21а)
Найти: Ф
Последовательность расчета соответствует последовательности технологических операций при намагничивании постоянного магнита в процессе его изготовления.
1. Расчет индукции Вст1 в нейтральном сечении О-О после намагничивания образца и последующего удаления заглушки из рабочего зазора. Сечение О-О характеризуется максимальным магнитным потоком. По мере приближения к воздушному зазору Ф будет за счет ФS и Фmin.
Расчет индукции Вст1 путем решения следующей системы 2 уравнений:
а) Вст = f(Hст) – кривая намагничивания магнитотвердого материала;
б) Вст1 = f(Hст1) – к.н. образца, когда убрана заглушка.
 ,
,
где
 – коэффициент рассеивания МЦ без якоря
в воздушном зазоре.
– коэффициент рассеивания МЦ без якоря
в воздушном зазоре.
Данное уравнение говорит о том, что индукция В в сечении О-О после удаления заглушки будет прямо пропорциональна магнитной проводимости G воздушного зазора.
Графики 2 уравнения
отображаются прямой, которая проходит
под углом 1:
 ,
,
где mH (А/см), mB (Тл/см) – масштабы по оси Н и В.
2. Расчет индукции Вст2 в сечении О-О при установлении якоря в рабочем зазоре. Это действие ведется путем решения системы 2 уравнений:
а) прямая возврата, которая проходит под углом
= arctg(r) – по справочнику r
б) Вст2 = f(Hст2)
 ,
,
где
 – коэффициент рассеивания магнитной
системы при наличии якоря в воздушном
зазоре
– коэффициент рассеивания магнитной
системы при наличии якоря в воздушном
зазоре
Решение системы
находится на пересечении прямой возврата
с лучом ОК2 под углом

3. Расчет потока в воздушном зазоре
 .
.
–––––––––––––––––––––––––
Дано: Ф, геометрия воздушного зазора, то есть известна G.
Найти: ГМЦ, материал магнита.
1. Выбор материала
В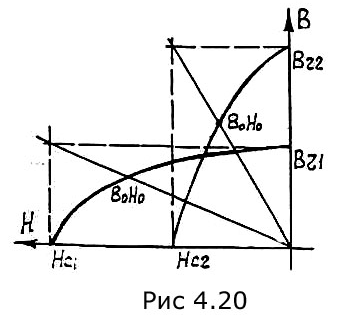 се
материалы можно разделить на
высококоэрционные и низкокоэрционные
(рис. 4.20). Постоянный магнит выполненный
из высококоэрционного материала должен
иметь небольшой угол
луча ОК, при котором он будет отдавать
в воздушный зазор максимальную энергию.
се
материалы можно разделить на
высококоэрционные и низкокоэрционные
(рис. 4.20). Постоянный магнит выполненный
из высококоэрционного материала должен
иметь небольшой угол
луча ОК, при котором он будет отдавать
в воздушный зазор максимальную энергию.
Учитывая, что tg G можно сделать вывод: постоянный магнит с повышенной заданной магнитной проницаемостью воздушного зазора целесообразно изготовлять из низкокоэрционного материала.
2. Геометрические размеры тела постоянного магнита рассчитываются из условия его работы в оптимальном магнитном режиме (Н0 ;В0).
Расчет:
– определение длины магнита
Ф
= (IW)G
= HстlстG
 .
.
– определение сечения
Фст = SстВст
 ,
,
где – коэффициент рассеивания постоянного магнита, который на данном этапе задается на основании опытных данных, а после определения ГМЦ он уточняется.
Глава 5 Основные виды эа и их выбор
§ 5.1 Реле
Реле – устройство, которое имеет скачкообразную гистерезисную характеристику управления.
Характеристика управления – зависимость У(IК) = f(Х = UУ)
Возможны 2 вида характеристик управления реле.
а) б)


ХВ
Хср
Характеристикой типа а) обладает реле с замыкающими контактами (ЗК); типа б) обладает реле с размыкающими контактами (РК).
Характеристики позволяют обеспечивать им 2 устойчивых положения – начальное и конечное, у реле быстродействие и помехоустойчивость.
tcp и tв не будут зависеть от скорости изменения входного сигнала.
Функции реле: 1) коммутация электрической цепи; 2) усиление и размножение входного сигнала; 3) фиксирование отклонения контролируемого параметра.
Классификация реле:
1. в зависимости от принципа действия привода:
электромагнитные, электродинамические, индукционные, тепловые и т.д.
2. в зависимости от входной величины, на которую реагируют реле:
U, I, P(давления), f, t-ры и т.д.
3. в зависимости от области применения:
промышленной автоматики, защиты энергосистем, радиоэлектроники.
4. по состоянию реле, в котором оно находится при снятии входной величины:
– одностабильные, у которых осуществляется самовозврат в исходное положение после снятия входной величины;
– двухстабильные, самовозврата нет, управление импульсное (благоприятные условия работы обмотки, надежность), устойчивое состояние фиксируется с помощью механических, электромагнитных или других защелок.
5. по массе:
микроминиатюрные (до 6 гр.), миниатюрные (до 16 гр.), малогабаритные (16-40 гр.), нормальные (больше 40 гр.).
6. по чувствительности:
высокочувствительные (с Рст до 10 мВт), чувствительные (до 50 мВт), нормальные (больше 50 мВт).
Основные параметры реле
1. Iном – номинальный ток реле, это максимальный ток, который способна выдержать контактная система в длительном режиме из условия допустимого нагрева
2. Uном – номинальное напряжение выходной цепи, это максимальное номинальное напряжение главной выходной цепи, в котором реле может работать надежно без пробоя
3. Iвкл, Iвыкл – включаемый и отключаемый предельный ток реле в режиме нормальной коммутации, это максимальное значение токов выходной цепи, которые может включать и отключать реле многократно при определенном напряжении и определенном характере нагрузки, оговоренных заводом-изготовителем.
4. Nмех – механическая износостойкость, это количество циклов срабатываний при токе выходной цепи равном нулю.
5. Nком – коммутационная износостойкость, это количество циклов срабатываний гарантированных заводом-изготовителем при определенных условиях (U, характер нагрузки).
6. tср – время срабатывания, это промежуток времени с момента подачи напряжения на катушку до момента замыкания ЗК.
7. tв – время возврата, это время с момента снятия напряжения до размыкания ЗК.
Электромагнитные реле
Это основной тип реле, это объясняется существенными усилиями электромагнитов при минимальной мощности и габаритах.
Они подразделяются на нейтральные и поляризованные (реагируют на полярность входного сигнала). Нейтральные реле самые универсальные.
Основные параметры нейтральных реле:
1) управляют мощностью до нескольких кВт, реле с Iном 10 А называют контакторами; 2) Средняя мощность Рср от 10 мВт до единиц Вт (чувствительные и нормальные реле);
3) tср = 10 мс – нормальные по быстродействию реле, частота включений – до 4000 вкл/час; 4) Nмех = (10-20)106; 5) Nком до нескольких миллионов.
Поляризованные реле применяются для усиления электрических сигналов в системах автоматики, измерительной техники.
Преимущества перед нейтральными:
1) реагируют на полярность управляющего сигнала; 2) большая чувствительность, Рср доли-единицы мВт; 3) большее быстродействие tср = 2-3 с;
4) управление реле м.б. осуществлено импульсами, что потребляемую мощность; 5) имеет несколько входов (до 5) при большом диапазоне входного сопротивления (от 1 Ом до нескольких кОм), что позволяет легко согласовать с различными источниками входного сигнала.
Недостатки:
1) небольшие мощности, которыми они могут управлять; 2) повышенная сложность и стоимость.
Указанные преимущества достигаются за счет применения поляризованного магнита.
Герконовые реле (ГР)
Являются разновидностью электромагнитных реле.
Выполнены на базе катушки внутрь которой вставлены герконы.
Особенности ГР по сравнению с электромагнитными:
1) более быстродействие tср = 0,5–2 мс;
2) износостойкость, особенно при малых токах до 100 млн. срабатываний
3) стабильность сопротивления контактов в процессе эксплуатации;
4) повышенная способность коммутировать пониженные токи 10-14 А при пониженном напряжении 10-6.
Эти преимущества вытекают из преимуществ герконов.
Недостатки:
1) меньшее значение удельных токов нагрузки;
2) более критичны к токам перегрузки, к воздействию внешних магнитных полей
Отличительные особенности герконов обуславливают их применение в цепях с I 250 мА и U до (30-60) В, особенно когда необходимо быстродействие и число коммутаций.
Применяются в АТС, измерительной технике и слаботочной автоматике.
Тенденции развития герконовых реле:
1) надежности; 2) улучшение массогабаритных показателей.
1 цель идет по пути изоляции контактной системы от окружающей среды. Контактную систему помещают в герметизированный контактный модуль с сухим чистым воздухом. В контактный модуль входит якорь с полюсами магнитной системы, остальная часть снаружи.
2 цель идет за счет совершенствования электромагнитного привода, который занимает значительную часть реле. Совершенствование привода идет по следующим направлениям:
– применение электромагнитов с уравновешенным и внутрикатушечным якорем §4.5
– применение поляризованных электромагнитов, которые позволяют в 2-3 раза уменьшить массу и габариты реле, в 1,5-2 раза чувствительность реле
– частичное объединение контактной и магнитной систем. Например плоская контактная пружина является якорем реле
– применение магнитополупроводниковых (гибридных) электромагнитов в магнитную систему которых встраивается усилитель на бескаркасных полупроводниковых приборах (0,05-0,1 мВт)
– использование микротехнологий, применяемых для производства полупроводниковых приборов.
В настоящее время используя последние достижения науки и техники создан новый класс реле – микроминиатюрные. Они согласованы с интегральными микросхемами, что позволяет им вписываться в плату с полупроводниковыми приборами.
Примером такого реле является реле РЭС-49 (3,5 гр.) Iном = 1 мА, Uн = 35 В, Рср = доли Вт; реле ТНК21ДТ Uн = 27 В, Рср = доли Вт.