

7.5. Сполучення еом з об'єктом управління
Усі технічні засоби контролю і управління технологічними процесами, включаючи ЕОМ, можна розділити по місцю їх розташування на дві основні групи:
1) засоби, які розташовуються безпосередньо на технологічному устаткуванні або поряд з ним;
2) засоби, які розміщуються в приміщеннях служби контролю і управління або поряд з ними, на видаленні від оснащення технологічного процесу.
До першої групи відносяться датчики і старанні меха-низмы, до другої групи — ЕОМ і електронні пристрої перетворення сигналів. Сполучною ланкою між ними є перехідні пристрої.
Проте при існуючому різноманітті технічних засобів і ЕОМ система контролю і управління технологічним процесом має бути єдиним організмом, постро-енный однаково і що функціонує за загальними правилами. Найбільш раціональний шлях створення таких систем полягає у використанні стандартних пристроїв, промисловістю, що випускаються, і що задовольняють наступним вимогам.
1. Системні вимоги. Має бути передбачена можливість зв'язку з широкою номенклатурою датчиків (тиски від ва-куума до 107 Па; температури від - 270 до 3000 °З; частоти враще-ния від 10 до 300000 про/мін і так далі) і старанних механізмів (електродвигуни постійного і змінного струму, електроклапани, пускачі, електромагніти і реле з напругою від 12 до 380 В і так далі).
2. Вимоги до з'єднання з ЕОМ. Вони пов'язані із зручністю підключення технічних засобів до ЕОМ, обміну сигналами з ЕОМ, завадозахищеністю каналів зв'язку з ЕОМ і так далі
3. Конструктивні вимоги. Вони пов'язані із створенням удоб-ной для експлуатації конструкції технічних засобів АСУ.
Організація зв'язку технічних засобів системи контролю і управління з ЕОМ називається сполученням ЕОМ з технологічним процесом.
Перераховані раніше вимоги задовольняються при використанні магістрально-модульного принципу побудови електронних засобів АСУ.
Згідно з цим принципом кожен з електронних пристроїв (підсилювачі, АЦП, ЦАП, вхідні і вихідні регістри, у тому числі силові пристрої для управління старанними механізмами) або група однотипних пристроїв представляє собою окремий уніфікований модуль зі своїми вхідними і вихідними роз'ємами. Це може бути окрема плата, що включається в один з вільних слотів (роз'ємів) промислового комп'ютера, або закінчений уніфікований блок,який знаходиться в уніфікованому каркасі (крейте).
Усі модулі (і окремі плати, і уніфіковані блоки) підключаються до єдиної стандартної магістралі, по якій передаються в ЕОМ перетворені в двійкові коди дані про параметри ТП, а від ЕОМ поступають (також у вигляді двійкових кодів) сигнали, що управляють, для старанних механізмів. Роботу усіх модулів синхронізує контроллер, виконаний, як і інші модулі, в єдиному конструктивному оформленні.
Перша магістрально-модульна система САМАС (Сотршег АррНсаНоп 1о Меазигетепг Апс! Сопгго1 — застосування компьюте-ра для виміру і управління) була розроблена в 70-х рр. XX ст. в США. Це була інформаційно-вимірювальна система для проведення складних експериментальних досліджень в галузі ядерної фізики, але потім вона стала використовуватися в медицині, промисловості і навіть в сільському господарстві.
У Росії аналогічна система СУМА (Система уніфікованих модулів багатомашинного аналізу) з'явилася у кінці 1970-х рр. в Інституті фізики високих енергій (р. Протвино), а вже в 1980-і рр. широко випускалася в Дубні як магістрально-модульна система «Вектор».
Принцип систем «Вектор» і САМАС один і той же, однакові і конструктивні рішення, за винятком того, що розміри модулів в системі «Вектор» вимірюються в міліметрах, а в системі САМАС — в дюймах. У обох системах стандартизовані:
• види модулів (блоків) : вхідні і вихідні регістри, уси-лители, АЦП, ЦАП, комутатори, лічильники, вимірники давле-ния, температури, вакууму;
• розміри конструктивних елементів : плат, роз'ємів, каркасів, стійок;
• джерела живлення : напруга +5, - 5, +12, - 12, +24, - 24 В постійного струму, 220 В змінного струму частотою 50 Гц;
• параметри сигналів від датчиків: струм — від 0 до 5 або до 20 мА, напруга — від 0 до 10 В;
• електричні схеми з'єднань;
• правила обміну даними між пристроями.
Основний конструктивний елемент обох систем — стійка, і якій розміщується до трьох каркасів з модулями і джерелами живлення. У кожному каркасі встановлюється до 25 модулів поодинокої ширини (20 мм для системи «Вектор» і близько 2/3 дюйма 1 (17,2 мм) для САМАС) з 90-контактними роз'ємами на задній панелі. У свою чергу, назадней стінці каркаса розміщено 25 стандартних 90-контактних роз'ємів, підключених до магистраляи.
Магістраль обміну даними між модулями і ЕОМ є великою кількістю провідником (у вигляді окремих дротів або доріжок друкованої плати) паралельно усі однойменні виводи усіх роз'ємів (за виключенням роз'єму джерела живлення, яке має свою схему з’єднань). Групи провідників магістралі, передавальних однорідні сигнали або виконуючих однорідні функції, назы-ваются шинами: шини даних, шини живлення і так далі. Кожен мо-дуль по тих, що спеціальним направляють вставляється в каркас до пол-ного з'єднання роз'ємів і підключення до загальної магістралі.
Модуль є платою з мікросхемами і являється, як правило, багатоканальним пристроєм (регістри на 16, 32, 64, 128 каналів; вимірник температури на 16 каналів і так далі). Можливе розміщення на одній платі декількох різних пристроїв (наприклад, АЦП, ЦАП, підсилювач).
На передній панелі кожного модуля встановлюються раз’єми, за допомогою яких він з'єднується з датчиками і виконавчими механізмами. Це, як правило, теж багато контактні роз'єми.
Якщо для управління технологічним процесом недостатньо тієї кількості модулів, яка розміщується в каркасі (тобто датчиків і старанних механізмів багато), то в стійку по-мещают другий каркас з власним набором модулів, а при необхідності — і третій каркас.
Обмін інформацією між модулями і ЕОМ забезпечує єдиний для усієї стійки контроллер. До його складу може входити свій мікропроцесор, що веде складну обробку сигналів і керівник черговістю їх обробки іншими модулями. У першу чергу, обробляються аварійні сигнали, потім — сигнали в ланцюгах захисту, далі — швидкі сигнали і так далі
Мікропроцесор контроллера виконує попередню обробку сигналів і накопичення інформації від модулів стійки, що прискорює роботу усієї системи управління.
Контроллер пов'язаний магістраллю з усіма модулями каркаса. Особливістю магістралі є робота в режимі почергової передачі інформації, тобто в кожен момент магістраль зайнята якимсь одним модулем, від якого вона отримує або якому передає інформацію. Саме контроллер визначає, како-му з модулів надавати магістраль в кожен конкретний момент.
Магістраль має наступну структуру (рис. 97) :
шини адрес і операцій, по яких передається код допустимого контроллером до магістралі модуля і умовний код виконаної операції (наприклад, передача даних з пристрою № 2 вибрані модулі в ЕОМ);
шини даних, по яких передається в цифровому виді від модулів в ЕОМ інформація про технологічні параметри і від ЕОМ в модулі коди сигналів, що управляють;
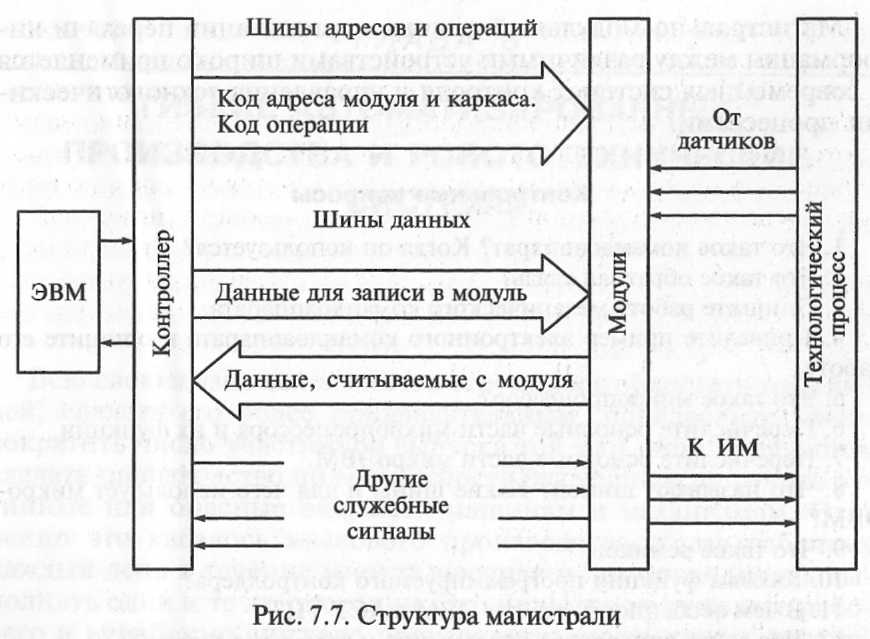
Рисунок97-Структура магістралі
шини службових сигналів, наприклад сигналів переривань, сигналів аварійних ситуацій, запиту модулем магістралі або сигналу готовності модуля до роботи та ін.
У пам'яті мікропроцесора контроллера зберігається програма опитування модулів. Наприклад, необхідно отримати від одного з датчиків інформацію про значення технологічного параметра. Відомо, з яким саме модулем сполучений вихід датчика. Кон-троллер виводить на шини адрес двійковий код цього модуля, сполучаючи з джерелом напругу ті з шин, на яких відповідно з кодом має бути логічний сигнал 1. Цей двоїчний код поступає на усі модулі, підключені до магістралі. Але тільки в одному модулі дешифратор «пізнає» код як свій, дозволяючи розташованим в цьому модулі пристроям виконати вказану контроллером операцію, наприклад перетворити сигнал від потрібного датчика в двійковий код. Цей же дешифратор дозволяє вихідним ланцюгам модуля вивести двійковий код результата на шини даних, по яких він поступає для подальшого аналізу в мікропроцесор або ЕОМ.
Для управління технологічним устаткуванням мікропроцесор видає на шини адрес код модуля, з яким сполучений потрібний старанний механізм, а на шини даних - двійковий код сигналу, що управляє.
Зазвичай цей код приймає модуль цифроаналогового перетворювача, який і формує аналоговий сигнал, що управляє, для старанного механізму.
Магістрально-модульний принцип організації передачі ин-формации між різними пристроями широко застосовується в сучасних системах контролю і управління технологически-ми процесами.
Контрольні питання
1. Що таке командоаппарат? Коли він використовується?
2. Що таке зворотний зв'язок?
3. Опишіть роботу механічного командоаппарата.
4. Наведіть приклад електронного командоаппарата і опишіть його роботу.
5. Що таке мікропроцесор?
6. Перерахуєте основні частини мікропроцесора і їх функції.
7. Перерахуєте основні частини мікро ЕОМ.
8. Що називають шиною? Які шини і для чого використовує мікро ЕОМ?
9. Що таке ремиконт?
10. Які функції програмованого контроллера?
11. У чому особливість роботи ЕОМ в АСУ ТП?
12. Що таке апаратне переривання і навіщо воно потрібне?
13. Поясните сенс пріоритетів сигналів переривання.
14. Яка різниця між машинними мовами і мовами високого рівня?
15. До якої мови — машинної або високого рівня — ближче мова програм для верстатів з ЧПУ?
16. Навіщо в ЕОМ використовують мультипрограмний режим?
17. Що називають сполученням ЕОМ з об'єктом управління?
18. У чому полягає магістрально-модульний принцип побудови електронних засобів АСУ?
19. Які магістрально-модульні системи ви знаєте?
20. Яка роль контроллера при використанні магістрально-модульного принципу?
21. Як відбувається вибір модуля і передача в нього даних по магістралі?