

Модуль 5. Керування технічними обєктами та технологічними процесами
План
5.1 Пристрої керування автоматичними системами
5.1.1 Пристрої керування з «жорсткою» логікою
5.1.2 Мікропроцесорні керуючи пристрої
5.1.3 ЕОМ в системах керування
5.1.4 Програмне зебеспечення систем контроля і керування
5.1.5 Спряження ЕОМ з обєктом керування
5.2 Гнучкі автоматизовані виробництва і робототехнічні системи
5.2.1 Гнучкі виробничі системи
5.2.2 Роботи і робототехнічні системи
Як вказувалося, керування — це формування впливів на об'єкт відповідно до заданого алгоритму. При керування технологічним процесом йдеться про дію на технологічне устаткування. Дія реалізується шляхом подачі сигналів, що управляють, на старанні механізми. Отже, функція пристрою, що управляє, полягає у формуванні сигналів, що управляють, відповідно до заданого алгоритму.
Стосовно завдань керування алгоритми керування можна підрозділити на дві групи: безваріантні і з вибором варіанту дій. Першу групу складають лінійні алгоритми, в яких задається жорстка послідовність дій незалежно від яких би то не було зовнішніх чинників. Такі алгоритми реалізуються керуючими пристроями, з «жорсткою» логікою.
До другої групи входять алгоритми з розгалуженням і циклічні алгоритми. Для їх реалізації потрібно складніші керуючи пристрої, здатні аналізувати ситуацію і вибирати варіант продовження дій, залежний відвиконання поставленої умови. Створення таких пристроїв стало можливим з появою засобів обчислювальної техніки і впровадженням їх в системи управління. Залежно від рівня, на якому відбувається аналіз і вибір рішення, ці пристрої підрозділяються на декілька типів, розглянутих далі.
5.1. Пристрої управління з «жорсткою» логікою
5.1.1. Лінійні процеси
Наведемо декілька прикладів процесів, які можуть бути описані лінійними алгоритмами (їх можна назвати лінійними процесами) :
• робота світлофора: включення першої групи ламп (зелене і червоне світло) на певний час, миготливий режим і тсчсние заданого часу, перемикання на другу групу ламп (жовте світло), перемикання на третю групу ламп (червоне і зелене світло), миготливий режим і так далі;
• рух ліфта у багатоповерховому будинку: відкриття дверей, витримка інтервалу часу, закриття дверей, включення двигуна на підйом або спуск, виключення двигуна після досягнення заданого поверху, відкриття дверей і так далі;
• приготування кави вуличним автоматом : перевірка отриманної суми грошей, випуск картонної скляночки, заповнення його заданою кількістю кави, додавання заданої кількості молока і так далі
Одна і та ж послідовність дій виконується при масовому виготовленні багатьох виробів (наприклад, болтів або підшипників), приготуванні тесту для випічки хліба або виточуванні однакових виробів на деревообробному верстаті.
Усі ці процеси є однозначними последо-вательность дій, що виконуються по командах пристрою, що управляє. Пристрої такого типу часто називають командоаппаратами. Розглянемо два варіанти командоапаратів : электромеханічні і електронні.
Для виконання лінійного алгоритму треба сформувати «жорстку» послідовність дискретних і аналогових управля-ющих сигналів для старанних механізмів відповідно до команд алгоритму. Оскільки ми розглядаємо електричні ЇМ, то сигнали дискет, що управляють, для них є просто імпульсами напруга, яка подається на вхід механізму шляхом замикання електричного ланцюга, сполученого з джерелом напруги. Отже, завдання командоапарата зводиться до замикання і розмикання в потрібні моменти потрібних контактів.
Аналогові сигнали, що управляють, містять інформацію, представлену або рівнем напруги, або тривалістю імпульсу. Оскільки зміст інформації в кожній команді лінійного алгоритму відомий заздалегідь (наприклад, «перемістити супорт на 11 мм»), то і потрібне значення напруги або дли-тельность імпульсу (час перебування контактів в замкнутому стані) можуть бути сформоване заздалегідь підбором пара-метров відповідних елементів командоаппарата.
Розглянемо можливі варіанти побудови командоапаратів з «жорсткою» логікою.
5.1.2. Командоапарати без зворотного зв'язку
Під зворотним зв'язком зазвичай розуміють передачу керуючому пристрою реакції у відповідь об'єкту управління. У найпростіших пристроях така передача не передбачена, т. е. передбачається, що сигнали, що управляють, завжди відпрацьовуються виконавчими механізмами саме так, як належить, і процес завжди протікає належним чином. Від такого командоапарата потрібно тільки замикання і розмикання контактів у визначені моменти часу.

Рисунок 91 Схема роботи електромеханічного командоаппарата
Електромеханічний командоапарат має у своєму складі розподільний вал, який обертається електродвигуном, забезпеченим редуктором, з постійною дуже малою швидкістю. На валу закріплені або барабан, або куркульки, або диски з виступами, які впливають на електричні контакти або інші старанні механізми. На рис. 91 представлена схема організації управління двома старанними механізмами. У міру обертання валу замикаються контакти ланцюга живлення того або іншого механізму на якийсь час, визначуване протяжністю виступів. Один оберт валу відповідає повному циклу уп-равління відповідним устаткуванням або етапом технологічного процесу.
Конструкція такого командоапарата дуже проста, але при необхідності зміни алгоритму управління доводиться замінювати вал з насадками або застосовувати складніші насадки — з регульованим профілем.
Механічні контакти можна замінити безконтактними перемикачами, наприклад оптичними, якщо замість кулачкового механізму використовувати прозорий диск з нанесеними в потрібних місцях непрозорими ділянками. Після досягнення заданного кута повороту диска крізь нього на приймач світла починає падати світловий потік, що рівнозначно замиканню контактів. Воно триває, поки диск не обернеться на деякий кут, при якому світловий потік урветься непрозорою ділянкою.
На різних кільцевих доріжках диска можуть розміщуватися програми управління різними незалежними один від одного виконуючими механізмами, кожен з яких включається і вимикається своїм приймачем світла. Для зміни алгоритму розум равления робиться заміна диска на іншій.
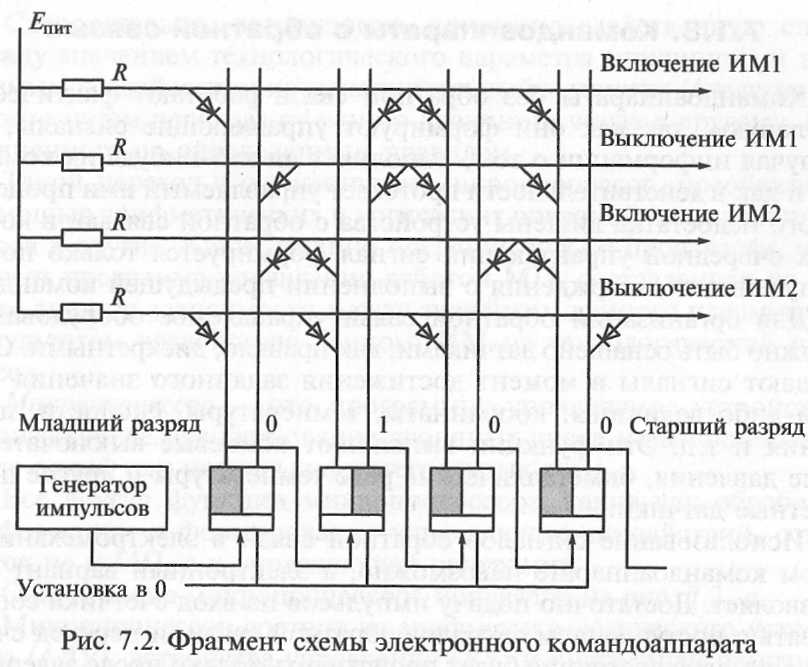
Рисунок 92 – Фракгмент схеми електронного командоапарата
Електронний варіант командоаппарата представлений на рисунку 92. Генератор імпульсів формує послідовність імпульсів, що підраховуються лічильником. Двійкові коди з виходу лічильника поступають на дешифратор — пристрій, який має декілька виходів і створює імпульс напруги на кожному з виходів тільки при певному коді, що поступає з лічильника. У дешифраторі використовуються напівпровідникові діоди, ввімкнуті так, що при будь-якому коді, окрім вибраного, хоч би один діод, сполучений з цим виходом, знаходиться у відкритому стані і створює на виході нульовий рівень напруги. І тільки при вибраному коді всі діоди закриті і напруга живлення Ещит поступає через резистор R на вихід дешифратора.
На рисунку 92 показаний варіант управління двома виконавчими механізмами, хоча число виходів дешифратора і керуючих ЇМ може бути будь-яким. Распайка діодів на приведеній схемі така, що перший старанний механізм включається при коді на виході лічильника 0010, а вимикається при ТОП. Другий ЇМ включається при коді 0101, а вимикається при 1000. Включення і виключення різних старанних механізмів може робитися за допомогою реле, підключених до виходів дешифратора. Конкретний час включення і виключення каж-дого ЇМ залежить від частоти дотримання імпульсів. При зміні алгоритму треба міняти дешифратор або змінювати розпайку діодів в нім