

Тема 3: Системы электроприводов механизмов непрерывного действия
1. Системы электроприводов механизмов непрерывного действия с.105-108
2.Электропривод эскалаторов c.112-114
3. Принцип работы схемы автоматизации эскалаторов с.114-116
1. В электроприводах ленточных конвейеров длиной до 3000 м и мощностью до 100 кВт, как правило, используются асинхронные короткозамкнутые двигатели. Достоинствами таких электроприводов являются простота и относительно низкая стоимость, недостатками — повышенный пусковой момент и, следовательно, возможность появления больших натяжений и пробуксовки ленты. Получили распространение и асинхронные электроприводы с муфтами скольжения (гидромуфта, электромагнитные муфты). Такие системы обеспечивают равномерное распределение нагрузки между двигателями в многодвигательном электроприводе и плавный пуск конвейера. В зарубежной практике находит применение двухдвигательный электропривод, в котором кроме главного двигателя устанавливается и вспомогательный меньшей мощности, который обеспечивает плавный разгон конвейерной ленты с уменьшенным ускорением. Мощность электропривода с короткозамкнутым АД может достигать 200 кВт.
Для более мощных электроприводов ленточных конвейеров наибольшее распространение получили АД с фазным ротором. В таких приводах можно обеспечить одинаковую жесткость характеристик, что крайне важно для конвейерных электроприводов.
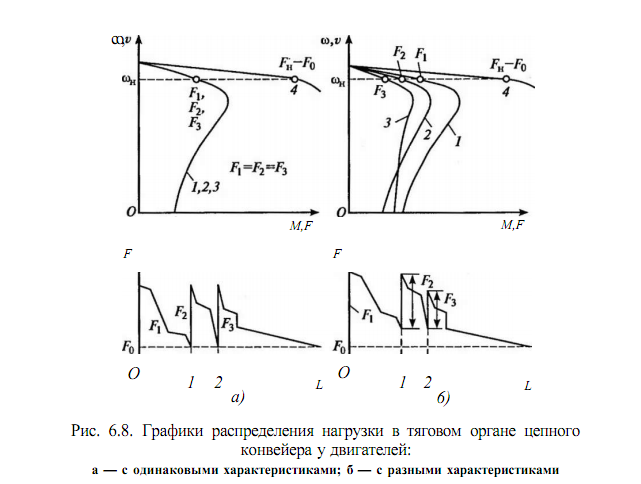
В случае, если характеристики двигателей неодинаковы, каждая машина может создавать тяговое усилие, отличающееся от расчетного. Рассмотрим механические характеристики трех двигателей одинаковой мощности, имеющих одинаковые параметры (рис. 6.8, а), и характеристики двигателей, имеющих разные параметры (см. рис. 6.8, б). Усилия, которые создают двигатели, находят построением суммарной характеристики 4. Так как роторы всех двигателей конвейера жестко связаны тяговым органом, то их скорость соответствует скорости движения конвейера, а суммарное усилие равно FH — F0. Тяговое усилие каждого двигателя легко рассчитать, проведя горизонтальную прямую, соответствующую номинальной скорости и пересекающую характеристики 1, 2, 3 и 4.
На рис. 6.8 кроме механических характеристик двигателей приведены диаграммы тяговых усилий. В тяговом органе при разных характеристиках двигателей может создаваться дополнительное натяжение, обусловленное разностью тяговых усилий, развиваемых двигателями конвейера.
При выборе двигателей приводных станций конвейера следует проверять их характеристики и по возможности добиваться совпадения. Поэтому целесообразно применять АД с фазным ротором, где соответствие характеристик может быть получено введением дополнительных сопротивлений в роторную цепь. На рис. 6.9 приведены механические характеристики двухдвигательного электропривода конвейера. Характеристики 1 и 2 являются естественными, характеристики 1' и 2' получены введением в цепь ротора дополнительного сопротивления. Суммарный момент и тя-говое усилие, развиваемое двигателями, будут одинаковыми как при жестких (1,2), так и при мягких (1, 2') характеристиках. Однако нагрузка между двигателями при мягких характеристиках распределяется более благоприятно. Таким образом, при включении резисторов в роторные цепи АД обеспечивается плавный пуск конвейера, а в случаях применения многодвигательного электропривода — равномерное распределение нагрузки между двигателями.
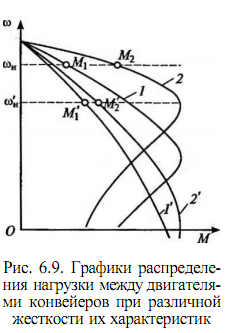
Рис. 6.9. Графики распределения нагрузки между двигателями конвейеров при различной жесткости их характеристик
Для конвейеров во многих случаях следует использовать регулируемые электроприводы, перспективными из которых являются системы с асинхронными двигателями и частотным управлением, асинхронные вентильные каскады, электроприводы посто-янного тока с тиристорными преобразователями. Применение линейных двигателей позволяет ликвидировать сложные и металлоемкие редукторные механические передачи и создать бесконтактные и безредукторные электроприводы.