

41. Критерий устойчивости Михайлова для непрерывных и линейных сар.
Он был сформулирован
А. В. Михайловым в 1936 году и базируется
на принципе аргумента. При этом для
анализа устойчивости рассматривается
характеристический комплекс системы
F(j![]() )
, который получается из
характеристического полинома
)
, который получается из
характеристического полинома
|
(4.16) |
заменой
p
на
![]() и
имеет вид:
и
имеет вид:
|
(4.17) |
где можно выделить вещественную и мнимую часть, а также амплитуду и фазу:
|
(4.18) |
Для конкретного
численного значения
![]() характеристический
комплекс представляет собой комплексное
число F(j
характеристический
комплекс представляет собой комплексное
число F(j![]() ,
которое
можно изобразить на плоскости в виде
вектора, соединяющего начало координат
с точкой
,
которое
можно изобразить на плоскости в виде
вектора, соединяющего начало координат
с точкой
![]()
При изменении
![]() от
0 до
от
0 до
![]() конец
вектора F(j
)
выписывает
на комплексной плоскости некоторую
кривую, которую называют годографом
Михайлова.
Причем начинается годограф, как следует
из соотношения (4.17), в точке с координатами
{
конец
вектора F(j
)
выписывает
на комплексной плоскости некоторую
кривую, которую называют годографом
Михайлова.
Причем начинается годограф, как следует
из соотношения (4.17), в точке с координатами
{![]() ;
j0}.
;
j0}.

Рис.4.8. Вид годографа Михайлова.
Формулировка критерия. Для устойчивости системы необходимо и достаточно, чтобы годограф Михайлова при изменении от 0 до начинался на вещественной оси в точке и проходил последовательно против часовой стрелки n квадрантов, не обращаясь в ноль и стремясь к в n-ом квадранте.
Доказательство
Утверждение
основано на расположении годографа
Михайлова на комплексной плоскости,
поэтому проанализируем, как связаны
корни характеристического уравнения
![]() с
видом F(j
).
Поскольку полином (4.16) можно представить
как произведение простых сомножителей
с
видом F(j
).
Поскольку полином (4.16) можно представить
как произведение простых сомножителей
F(p)
= (p -
|
(4.19) |
характеристический комплекс (4.17) также принимает вид:
F(j
)
=
|
(4.20) |
Его можно представить в форме
|
(4.21) |
Из выражений (4.18) и (4.21) следует, что
|
(4.22) |
|
(4.23) |

Если характеристическое
уравнение системы содержит чисто мнимые
корни, то, как следует из (4.22),
![]() при
определенном значении частоты
при
определенном значении частоты
![]() ,
так как при этом один из сомножителей
обратится в ноль. В случае устойчивой
системы корни расположены только в
левой полуплоскости плоскости корней
и не могут быть чисто мнимыми, следовательно,
в ноль годограф Михайлова не обращается.
,
так как при этом один из сомножителей
обратится в ноль. В случае устойчивой
системы корни расположены только в
левой полуплоскости плоскости корней
и не могут быть чисто мнимыми, следовательно,
в ноль годограф Михайлова не обращается.
Определим теперь
угол поворота вектора F(j
)
при изменении частоты от 0 до
.
Поскольку
![]() ,
в соответствии с (4.23), есть сумма отдельных
,
в соответствии с (4.23), есть сумма отдельных
![]() ,
то рассмотрим угол поворота каждого
сомножителя выражения (4.20).
,
то рассмотрим угол поворота каждого
сомножителя выражения (4.20).
Корень
характеристического уравнения
вещественный отрицательный;
![]() Соответствующий
сомножитель в (4.20)
имеет вид: (
Соответствующий
сомножитель в (4.20)
имеет вид: (![]() ).
).
Рис.4.9. Элементарный вектор, соответствующий устойчивому вещественному корню |
Изобразим этот
элементарный вектор на комплексной
плоскости; при изменении
от
0 до
его
вещественная часть остается неизменной
и равна
Как
видим, угол поворота элементарного
вектора, соответствующего устойчивому
вещественному корню, равен
|

Если корень
характеристического уравнения
вещественный положительный,
![]() ,
то угол поворота элементарного вектора
,
то угол поворота элементарного вектора
![]() равен
равен
![]()
Рассмотрим теперь
пару устойчивых комплексно - cопряженных
корней
![]() и
соответствующий им угол поворота
произведения
и
соответствующий им угол поворота
произведения
![]()
Рис.4.10. Векторы, соответствующие устойчивым комплексно - сопряженным корням |
У векторов А, В
начальные фазы одинаковы по модулю
( |

Суммарный угол
поворота для пары устойчивых комплексно
- сопряженных корней равен
![]()
Если комплексно
- сопряженные корни имеют положительную
вещественную часть, то суммарный угол
поворота равен
![]()
Таким образом, в
устойчивой системе каждый из n
корней даст приращение фазы
![]() ,
а общий угол поворота F(j
)
согласно (4.23)
равен
,
а общий угол поворота F(j
)
согласно (4.23)
равен
![]() ,
что и требовалось доказать. Вид годографа
Михайлова для устойчивых и неустойчивых
систем третьего порядка приведен на
рис.4.11.
,
что и требовалось доказать. Вид годографа
Михайлова для устойчивых и неустойчивых
систем третьего порядка приведен на
рис.4.11.

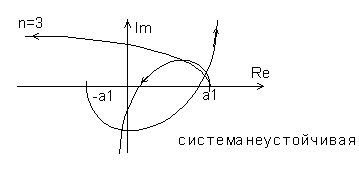
Рис.4.11. Годограф Михайлова для устойчивой и неустойчивой систем
Система будет находиться на границе устойчивости, если годограф Михайлова при некотором значении частоты обращается в ноль, то есть при выполнении условия:
|
(4.24) |

Здесь частота 0 - есть частота незатухающих колебаний системы.
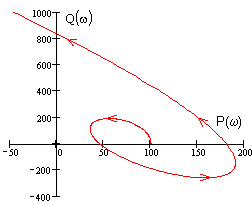
Пример 4.5.
Вид годографа Михайлова неустойчивой системы шестого порядка:

Пример 4.6.
Вид годографа Михайлова системы третьего порядка в зависимости от вличины коэффициента передачи:

|
|
|
Пример 4.7.
Оценить
устойчивость системы, структурная схема
которой имеет вид:

Определим передаточную функцию системы
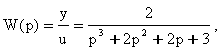
и запишем ее характеристический полином
![]()
Заменой
p на
![]() перейдем
к выражению для годографа Михайлова
перейдем
к выражению для годографа Михайлова
![]()
которое представим в форме
![]()
С целью построения годографа Михайлова вычислим значения вещественной и мнимой части при конкретных значениях частоты и занесем их в таблицу.
