

18. . Уравновешивание масс в механизмах и машинах
10.1. Действие сил на фундамент. Условия уравновешивания
В общем случае в кинематических парах механизмов и машин возникают динамические усилия, переменные по величине и направлению. Через стойку они передаются на фундамент, вызывая дополнительные напряжения в отдельных звеньях, вибрацию и ухудшение условий работы. Чтобы этого избежать, необходимо рационально подобрать и расположить массы звеньев с условием полного или частичного гашения динамических усилий. Эта задача решается при уравновешивании.
Основными
динамическими составляющими при работе
любого механизма являются силы инерции,
которые, как правило, переменны по
величине и направлению. Это характерно
и для случаев, когда входное звено
вращается с постоянной угловой скоростью
![]() (рис.
96). Все силы и моменты сил инерции можно
привести к главному вектору и моменту
относительно выбранной точки:
(рис.
96). Все силы и моменты сил инерции можно
привести к главному вектору и моменту
относительно выбранной точки:
![]() ;
;
![]()
Полностью
уравновешенным считается механизм, в
котором
![]() и
и
![]() ,
т.е. сила давления стойки на фундамент
остаётся постоянной при движении
звеньев.
,
т.е. сила давления стойки на фундамент
остаётся постоянной при движении
звеньев.
Из
теоретической механики известно,
что:
![]() ,
,
где
![]() масса
всех подвижных звеньев;
масса
всех подвижных звеньев;
![]() ускорение
центра масс системы.
ускорение
центра масс системы.
Следовательно,
для выполнения условия
необходимо,
чтобы
![]() .
.
Это
равносильно требованию постоянства
положения центра масс механизма
относительно стойки. Такое уравновешивание
называется статическим
или уравновешиванием
первого рода.
В этом случае используется метод
заменяющих (сосредоточенных) масс,
обладающих массой, центром масс и
моментом инерции
![]() заменяемого
твёрдого тела (звена) с распределённой
массой. Если поместить начало системы
координат в центр масс системы, то
условия эквивалентности заменяемой и
заменяющих масс запишутся так:
заменяемого
твёрдого тела (звена) с распределённой
массой. Если поместить начало системы
координат в центр масс системы, то
условия эквивалентности заменяемой и
заменяющих масс запишутся так:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
т.е. в общем случае плоского звена необходимы четыре заменяющих массы. В частных случаях число заменяющих масс может быть сведено к двум. Например, для звена АВ (рис. 97) можно ограничиться частичной заменой его массы m дву-
м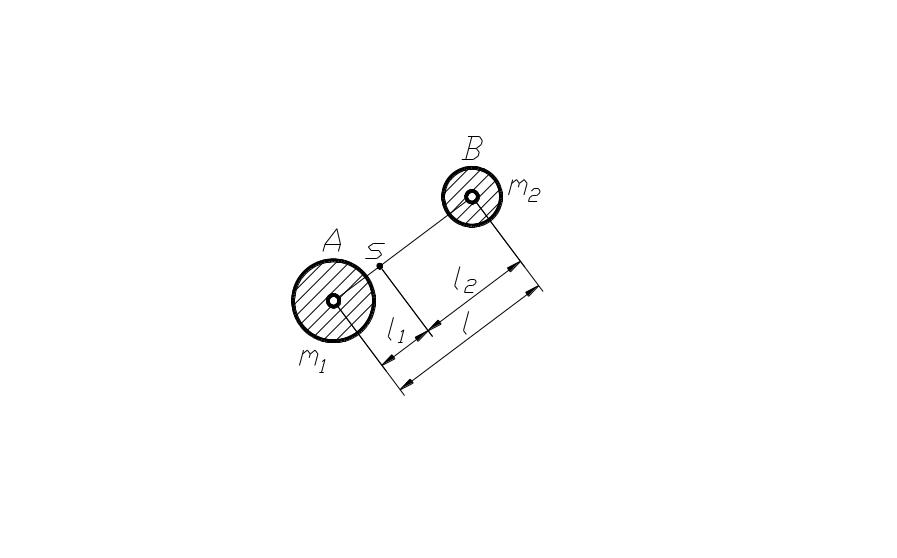 я
массами m1
и m2,
учитывая условия:
я
массами m1
и m2,
учитывая условия:
![]() ;
;
![]() .
.
Отсюда:
![]() ;
;
![]() .
.
Для полного уравновешивания механизма необходимо выполнение обоих условий: ; , причём выполнение условия решается при моментном (динамическом) уравновешивании, которое называется уравновешиванием второго рода.
рис. 97
19. Уравновешивание с помощью противовесов на звеньях механизма
Рассмотрим последовательность статического уравновешивания на примере четырёхшарнирного механизма (рис. 98, а). Заменяем массы звеньев 1, 2, 3 сосредоточенными массами в точках A, B, C, D, причём в силу неподвижности точек A и D, массы, сосредоточенные в этих точках, можно не учитывать.
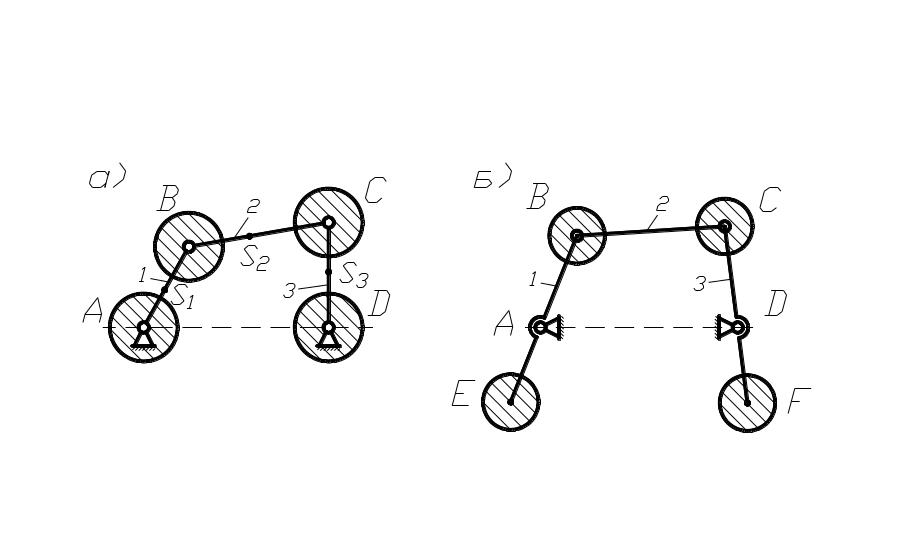
рис. 98
Приведённые массы в точках В и С равны:
 ;
;
 .
.
Так как заменяющие массы mB и mC совершают вращательное движение, то для уравновешивания сил инерции необходимы противовесы с массами mЕ и mF, определяемыми из условий (рис. 98, б):
![]() ;
;
![]() ,
,
где, задавая длины противовесов, можно получить их массы и наоборот.
Рассмотрим
моментное уравновешивание на примере
четырёхшарнирного механизма. Его
приближённое моментное уравновешивание
можно осуществить после статического
уравновешивания, введя в схему механизма
два одинаковых дополнительных противовеса
![]() (рис.
99),соединённых с зубчатыми колёсами “a”
и “b”.
Колесо “a”
жёстко связано с кривошипом 1 и вращается
с угловой скоростью
(рис.
99),соединённых с зубчатыми колёсами “a”
и “b”.
Колесо “a”
жёстко связано с кривошипом 1 и вращается
с угловой скоростью
![]() ,
а равное ему колесо “b”
вращается с той же угловой скоростью
,
но угловые координаты противовесов
отличаются на 1800,
поэтому момент пары сил инерции от
противовесов
равен
,
а равное ему колесо “b”
вращается с той же угловой скоростью
,
но угловые координаты противовесов
отличаются на 1800,
поэтому момент пары сил инерции от
противовесов
равен
![]() .
Подбирая положение точки E,
можно обеспечить направление
.
Подбирая положение точки E,
можно обеспечить направление
![]() ,
противоположное направлению
,
противоположное направлению
![]() ,
а массу противовесов
определяют
из условия
=
.
,
а массу противовесов
определяют
из условия
=
.
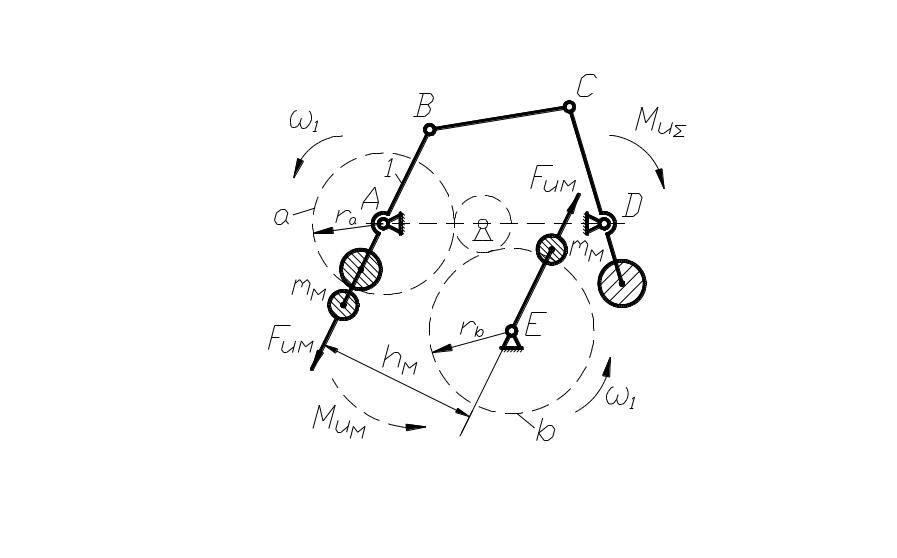
рис. 99