

17.Движение в неинерциальных системах отсчета. Кинематика относительного движения.Абсолютные,Относительные,переносные скорости и ускорения, кориолисово ускорение.
Неинерциа́льная систе́ма отсчёта — система отсчёта, к которой не применим закон инерции (говорящий о том, что каждое тело, в отсутствие действующих на него сил, движется по прямой и с постоянной скоростью), и поэтому для согласования сил и ускорений в которой приходится вводить фиктивные силы инерции. Всякая система отсчета, движущаяся с ускорением относительно инерциальной, является неинерциальной.Законы Ньютона выполняются только в инерциальных системах отсчёта.
Во многих случаях необходимо изучать движение материальной точки или тела по отношению к неинерциальной системе отсчета. Рассмотрим движение материальной точки М относительно двух прямоугольных декартовых систем координат X, Y, Z и X', Y', Z' (рис. 7.1). Пусть первая система координат является инерциальной, а вторая движется относительно нее произвольным образом. Систему X, Y, Z будем условно считать неподвижной.а движение точки М относительно этой системы отсчета будем называть абсолютным движением. Движение точки М относительно подвижной системы отсчета X', Y', Z' будем называть относительным движением. Положение точки М относительно неподвижной системы координат определяется радиусом-вектором г = х\ + yj + zk, а относительно подвижной — радиусом-вектором г' =x'i' + у'j' + г'к', где х, у, г и х', у', г' — координаты точки М в этих системах. Из рис. видно, что
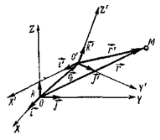
r=r0+r’=r0+ x'i' + у'j' + г'к'(1)
где г0 — радиус-вектор, проведенный из начала О неподвижной системы в начало О' подвижной системы координат.
Скорость точки М относительно неподвижной системы координат равна
![]() и
называется абсолютной скоростью точки
и
называется абсолютной скоростью точки
Из
(1) следует, что
![]() (2’)
ИЛИ
(2’)
ИЛИ
![]() (3)
(3)
где
![]() (4)-абсолютная
скорость точки О',
т. е. скорость подвижной системы координат
в ее поступательном движении. Вектор
(4)-абсолютная
скорость точки О',
т. е. скорость подвижной системы координат
в ее поступательном движении. Вектор![]() по
аналогии с (2)
определяет
скорость точки М
относительно подвижной системы
координат. Его называют относительной
скоростью
точки
М.Изменение
ортов i',
j'
и
к' подвижной системы координат может
быть вызвано лишь тем, что эта система
движется не только поступательно, но
одиовременно
вращается вокруг точки О', Следовательно,
векторы
по
аналогии с (2)
определяет
скорость точки М
относительно подвижной системы
координат. Его называют относительной
скоростью
точки
М.Изменение
ортов i',
j'
и
к' подвижной системы координат может
быть вызвано лишь тем, что эта система
движется не только поступательно, но
одиовременно
вращается вокруг точки О', Следовательно,
векторы
![]()
![]() и
и![]() являются
линейными
скоростями концов соответствующих
ортов в этом вращательном движении.
Если угловая скорость подвижной системы
равна ,то
являются
линейными
скоростями концов соответствующих
ортов в этом вращательном движении.
Если угловая скорость подвижной системы
равна ,то
![]() (6),а
(6),а
![]() (7)
(7)
На основании соотношений (4), (5) и (7) уравнение (3) можно теперь переписать в таком виде:
![]() (8)
(8)
Сумма первых двух членов правой части второго равенства представляет собой абсолютную скорость той точки подвижной системы (т.е.жестко связанной со всей сист.),через которую в данный момент времени проходит рассматриваемая матер. т.М. Эту скорость называют переносной скоростью точки М и обозначают е.
![]() (9)
(9)
Т![]() аким
образом, абсолютная
скорость точки М равна сумме ее переносной
и относительной скоростей:
аким
образом, абсолютная
скорость точки М равна сумме ее переносной
и относительной скоростей:
(10)
Абсолютным ускорением точки М называют ее ускорение по отношению к неподвижной инерциальной системе отсчета:
Из уравнений (10) и (9) следует, что
![]()
или на основании (5) и (6):
![]() (11)
(11)
![]() где
где
![]() (12)
(12)
ускорение подвижной системы в ее поступательном движении, (13)
![]()
угловое ускорение подвижной системы, (14)
о![]() тносительное
ускорение точки
М
(ее ускорение по отношению к подвижной
системе).
Из
сопоставления формул (2'), (4) и (8) видно,
что
тносительное
ускорение точки
М
(ее ускорение по отношению к подвижной
системе).
Из
сопоставления формул (2'), (4) и (8) видно,
что
![]()
Поэтому уравнение (11) можно записать в такой форме: (15)
или
![]() (16)
где
(16)
где
![]() (17)
(17)
переносное ускорение точки М, равное абсолютному ускорению той точки подвижной системы, через которую в данный момеит времени проходит рассматриваемая материальная точка М;
![]() (18)
(18)
►—кориолисово, или поворотное, ускорение точки М, обусловленное вращением подвижной системы.
Таким образом, равенство (16) свидетельствует о том, что абсолютное ускорение точки равно сумме ее переносного, кориолисова и относительного ускорений.
Как видно из (18), кориолисово ускорение максимально, если относительная скорость точки r перпендикулярна к вектору угловой скорости подвижной системы. Если угол между векторами r и равен 0 или , то кориолисово ускорение равно нулю
Если подвижная система так же, как и неподвижная, является инерциальиой, то==a0=0, и уравнения (10) и (16) переходят в известные соотношения:
v![]() = v0
+ vr
и
= v0
+ vr
и
вытекающие из преобразований Галилея
В том случае, когда подвижная система движется только поступательно(==0), уравнения (10) и (16) имеют следующий вид:
v
= v0
+ vr
и
![]()
Теорема
о сложении ускорений (теорема
Кориолиса): ![]() ,
где
,
где ![]() –
ускорение Кориолиса (кориолисово
ускорение) – в случае непоступательного
переносного движения абсолютное
ускорение = геометрической сумме
переносного, относительного и кориолисова
ускорений. Кориолисово ускорение
характеризует: 1) изменение модуля и
направления переносной скорости точки
из-за ее относительного движения; 2)
изменение направления относительной
скорости точки из-за вращательного
переносного движения. Модуль ускорения
Кориолиса: а
–
ускорение Кориолиса (кориолисово
ускорение) – в случае непоступательного
переносного движения абсолютное
ускорение = геометрической сумме
переносного, относительного и кориолисова
ускорений. Кориолисово ускорение
характеризует: 1) изменение модуля и
направления переносной скорости точки
из-за ее относительного движения; 2)
изменение направления относительной
скорости точки из-за вращательного
переносного движения. Модуль ускорения
Кориолиса: а![]() с=2×|e×vr|×sin(e^vr),
направление вектора
с=2×|e×vr|×sin(e^vr),
направление вектора ![]() определяется
по правилу векторного произведения,
или по правилу Жуковского: проекцию
относительной скорости на плоскость,
перпендикулярную переносной угловой
скорости, надо повернуть на 90о в
направлении вращения.
определяется
по правилу векторного произведения,
или по правилу Жуковского: проекцию
относительной скорости на плоскость,
перпендикулярную переносной угловой
скорости, надо повернуть на 90о в
направлении вращения.
Кориолисово уск. = 0 в трех случаях: 1) we=0, т.е. в случае поступательного переносного движения или в момент обращения угл. скорости в 0; 2) vr=0; 3) sin(we^vr)=0, т.е. Ð(we^vr)=0, когда относительная скорость vr параллельна оси переносного вращения. В случае движения в одной плоскости – угол между vr и вектором e = 90о, sin90o=1, ас=2×e×vr.