

8.20. Оценка качества сар по временным характеристикам
Различ. След. Критерии снятия вых. хар-к
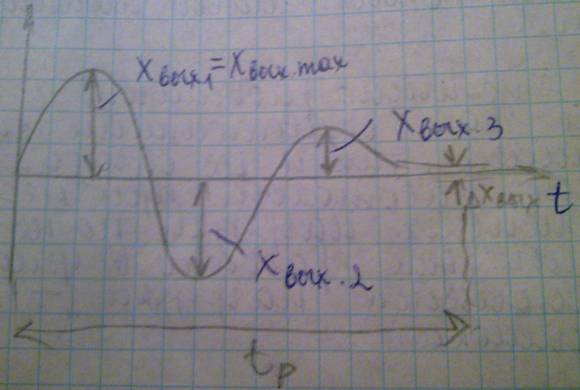
РИС.21.1
Рис.а)- при ступенчатом воздействии по заданию рег-ра ( по отклонению)
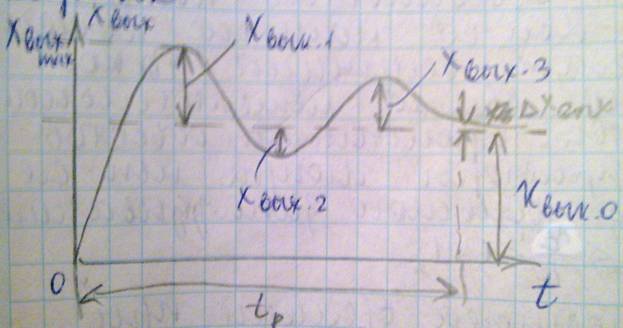
Рис. б)- по возмущении ( по каналу регулирующего органа)
Оценки кач-ва рег-ния АСР.
8) степень затухания вилка.
9) Перерегулирование б
10) max величина динамич. Отклонения Xвыхmax
11) время регулирования tp
1.Степень затухания вилка.- есть отношение разности 2-х соседних положительных амплитуд колебаний вых. Величины к 1-ой из них
вилка=(Xвых1-Xвых3)/Xвых1
В незатухающих колебаниях вилка =0 . Чем больше вилка, тем быстрее затухает переходной процесс. В практике 0,7<=вилка<=0,9.
12. Перерегулирование- наз-ся отношение разности между max отклонением и установившемся значением регулируемой величины к установившемуся знач. Регулируемой велич. ( по отклонению)
а)б=(Xвыхmax-Xвых0)/Xвых0*100%
б) Xвых2/Xвых1*100% по Капеловичу
4. время регулирования tp — промежуток времени в течении к-го отклонение регулируемой величины от заданного знач. Делается меньше определенной наперед заданной велич. Дельта хвых.
Настройки регулятора необходимо выбирать max, чтобы обеспечить минимально возможное значение общего времени регулирования, либо мин-ое значения 1-ой полуволны переходного процесса.
Показатель колебательный М- хар-ет величину максимума модуля частотной передаточная ф-ции замкнутой сис-мы ( на частоте резонанса) и тем самым хар-ет колеб. св-ва сис-мы.
Показатель колеб. Имеет вид : рис.21.2
Условно считается, что знач. М=1,5до1,6 явс-ся оптимальным для промыш. САР, т.к. В этом случае величина перерегулирования обеспечивается в р-не б=20%до40%. При увелич. М колебательноси в сис-ме возрастает.
9. Представление импульсного элемента при исследовании импульсных сар.
Амплитудно-импульсный элемент представляет собой устройство, реагирующее на дискретные равноотстоящие друг от друга значения, входного сигнала x(t) при t=mT. Его выходной величиной является последовательность импульсов определенной формы S(t) (необязательно прямоугольной!), амплитуды которых пропорциональны дискретным значениям входной величины x(mt).



Встает задача (для каждого конкретного ИЭ – своя, ибо у каждого ИЭ может быть своя форма импульса S(t)) нахождения математического описания ИЭ. Задача изучения ИЭ существенно упрощается если реальный ИЭ заменить совокупностью гипотетических простейшего импульсного элемента (ПИЭ) и формирующего устройства ФУ.




ПИЭ это такое устройство, на выходе которого модулированная последовательность σ-функций, «площади» которых равны дискретным значениям входной величины x(mT). ФУ из этой модулированной последовательности σ-функций формирует импульсы с заданной формой S(t)/
Итак, реальный ИЭ, в котором импульсы имеют произвольную форму, следовательно, каждый ИЭ нуждается в специальном описании, заменяется совокупностью (фиктивной, существующей только в математических конструкциях) ПИЭ, который одинаков для любых реальных ИЭ, и ФУ, в котором и отражаются различия в ИЭ. Однако, ФУ это непрерывное, а не импульсное устройство, и изучать его существенно проще методы линейной ТАР.