

49. Гармоническая линеаризация. Физический смысл коэффициентов гармонической линеаризации.
Физический смысл
гармонической линеаризации состоит в
следующем. Рассмотрим сначала однозначную
нелинейность (7) и опустим из рассмотрения
высшие гармоники
![]() -
это уравнение прямой с наклоном
-
это уравнение прямой с наклоном
![]() .
.
Это выражение примерно заменяет нелинейную характеристику y=F(x) прямой линией y=q(a)x в диапазоне изменения амплитуды от –а до + а.
П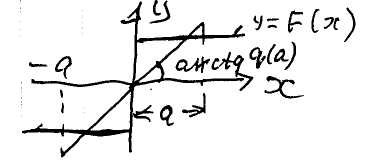 ри
другой амплитуде входного сигнала а1,
будет другой коэффициент q(a1)
и значит другой наклон прямой линии
(чем больнее «а» тем меньше угол наклона).
Отличие от обычной линеаризации (которая
была в части 1 ТАУ) в том, что при обычной
линеаризации наклон прямой был постоянен
при любом входном сигнале, при гармонической
линеаризации входной сигнал – гармоника
и угол наклона зависит от амплитуды
этой гармоники.
ри
другой амплитуде входного сигнала а1,
будет другой коэффициент q(a1)
и значит другой наклон прямой линии
(чем больнее «а» тем меньше угол наклона).
Отличие от обычной линеаризации (которая
была в части 1 ТАУ) в том, что при обычной
линеаризации наклон прямой был постоянен
при любом входном сигнале, при гармонической
линеаризации входной сигнал – гармоника
и угол наклона зависит от амплитуды
этой гармоники.
Для неоднозначных
нелинейностей (см. 6 без учета высших
гармоник) первое слагаемое правой части
также характеризует замену нелинейной
характеристики y=F(x)
прямой линией y=q(a)x
с наклоном зависящим от амплитуды «а»
входного гармонического сигнала. Второе
же слагаемое зависящее от
![]() (которое всегда отрицательно) означает,
что фаза сигнала гармонически
линеаризованного элемента будет
отставать от фазы на входе. Величина
этого отставания тоже зависит от
амплитуды «а».
(которое всегда отрицательно) означает,
что фаза сигнала гармонически
линеаризованного элемента будет
отставать от фазы на входе. Величина
этого отставания тоже зависит от
амплитуды «а».
50. Идентификация объектов по временным характеристикам. Определение кривой разгона объекта по его импульсной характеристике.
Кривые разгона, как уже было отмечено, снимаются обычно экспериментально. После установления стабильного режима работы регулируемого объекта производится быстрое перемещение одного из регулирующих органов и регистрируется изменение во времени всех регулируемых величин объекта, на которые действует выбранное возмущение. В процессе проведения опыта, следует предотвратить возникновение других возмущений.
Величину возмущения выбирают на основании конкретных условий работы исследуемого объекта. Она должна быть достаточно большой для того чтобы мелкие посторонние возмущения, неизбежные во время работы объекта, не исказили характера изменения регулируемых величин. Однако слишком большие отклонения регулирующего органа также, нежелательны так как они могут привести к сильным нарушениям режима работы объекта. ;Кроме того :в этом случае в .характеристиках могут появиться нелинейныеe зависимости..
При снятии характеристик необ-мо указать начальный установившийся режим, в окрестности к-го производился опыт, a также величину возмущения при обработке записей желательно провести расчет приведя переходную функцию к единичному возмущению. Опыты следует повторять до тех , пока не будут получены достаточно сходные результаты. По полученным данным строятся усредненные графики. Особо тщательно нужно следить точной записью кривых разгона в их начальной части при малых отклонениях регулируемых величин от начального состояния. Объясняется это тем, что при работе системы отклонения регулируемых величин не могут быть большими. Для болёе полной оценки динамических свойств объекта кривые разгона следует снимать при различных уставившихся режимах (например, при минимальной, средней и максимальной нагрузках регулируемого объекта). Нужно также изменять направление действия возмущения (перемещать регулирующий орган в сторону его открытия и в сторону закрытия). При этом могут быть выявлены нелинёйности и несимметричности ОР, которые должны учитываться при расчете системы.
Определение кривых разгона объектов регулирования по импульсным характеристикам.
Часто в условиях
эксплуатации бывает невозможно снять
кривую разгона при продолжительном
возмущении достаточно большой величины.
В этом случае снимают так называемую
импульсную характеристику, а затем
по ней находят кривую разгона.
Для определения
импульсной характеристики на вход
объекта подается возмущение в виде
прямоугольного импульса достаточно
большой амплитуды и записывается
изменение регулируемого параметра
(рис.1). Реакция объекта на таксе возмущение
(кривая yи
) называется
импульсной характеристикой объекта.
Если исследуемый
объект линейный, то на основании принципа
суперпозиции импульсную характеристику
можно представить , как реакцию объекта
на два скачкообразных возмущения,
направленных в противоположные стороны
и сдвинутых на время
![]() .
Кривая
.
Кривая
![]() есть результат действия скачкообразного
возмущения 1, кривая возмущения
есть результат действия скачкообразного
возмущения 1, кривая возмущения
![]() - возмущение 2. Отсюда следует, что для
построения интересующей нас кривой
разгона
надо, начиная
с момента времени
,
в который было снято возмущение, добавлять
к импульсной характеристике вычисленные
значения кривой разгона, сдвинутые на
отрезок времени
назад (рис1.в).
- возмущение 2. Отсюда следует, что для
построения интересующей нас кривой
разгона
надо, начиная
с момента времени
,
в который было снято возмущение, добавлять
к импульсной характеристике вычисленные
значения кривой разгона, сдвинутые на
отрезок времени
назад (рис1.в).
