

31. Определение оптимальных параметров настройки пи – регуляторов.
ПИ – регулятором называют пропорциональный регулятор с введением в закон регулирования интеграла. ПИ – регулятор производит перемещение регулирующего органа пропорционально отклонению и интегралу от отклонения регулируемой величины.
Уравнение идеального ПИ – регулятора:
![]() (3.4)
(3.4)
Эта формула может быть представлена также в другом виде:
![]()
Т.е. скорость
перемещения регулирующего органа
пропорциональна отклонению скорости
изменения регулируемой величины. ПИ –
регуляторы имеют два регулируемых
динамических параметра, которые
используются в качестве настроечных
параметров. Это
![]() -- коэффициент усиления регулятора и
-- коэффициент усиления регулятора и
![]() -
постоянная времени интегрирования,
величина которой характеризует степень
ввода в закон регулирования интеграла.
Этот параметр называют иногда временем
«изодрома» или временем «удвоения»,
так как
обычно
определяют как время, в течении которого
выходная координата
-
постоянная времени интегрирования,
величина которой характеризует степень
ввода в закон регулирования интеграла.
Этот параметр называют иногда временем
«изодрома» или временем «удвоения»,
так как
обычно
определяют как время, в течении которого
выходная координата
![]() регулятора при скачкообразном возмущении
достигает своего удвоенного значения
(рис.3.9)
регулятора при скачкообразном возмущении
достигает своего удвоенного значения
(рис.3.9)
В динамическом
отношении ПИ – регулятор подобен двум
включенным параллельно звеньям:
безынерционному с коэффициентом усиления
и
интегрирующему со скоростью разгона
![]()
При беспредельном
увеличении времени интегрирования
ПИ - регулятор превращается в
пропорциональный. Если устремить
и
к нулю, но так чтобы их отношение
![]() оставалось
постоянным, то получим интегральный
регулятор.
оставалось
постоянным, то получим интегральный
регулятор.
Передаточную функцию и АФХ идеального ПИ – регулятора легко получить из уравнения (3.4)
 (3.5.)
(3.5.)
На комплексной плоскости АФХ ПИ – регулятора можно изобразить в идее прямой, идущей из бесконечности параллельно мнимой оси (рис.3.10) на расстоянии - от нее и заканчивающейся на оси абсцисс. ПИ – регулятор занимает промежуточное положение между пропорциональным и интегральным регуляторами. В зависимости от соотношения пропорциональной и интегральной составляющей фазовый угол может изменяться в пределах от 0 до 900.
Уравнение временной характеристики можно получить с помощью обратного преобразования Лапласа, используя формулу (3.6.) для предаточной функции:
![]() отсюда
отсюда
![]() (3.6)
(3.6)
Где
![]() -- скачкообразное возмущение.
-- скачкообразное возмущение.
Построенная по этому уравнению временная характеристика ПИ - регулятора приведена на рис 3.11.
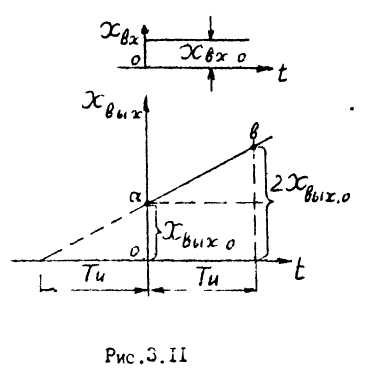
Она состоит из двух
частей. Отрезок
характеризует «пропорциональную часть»,
т.е. изменение регулирующего воздействия
в соответствии с первым слагаемым
уравнения 3.6. Отрезок ав представляет
собой «интегральную часть», которая
определяется вторым слагаемым уравнения.
Постоянная времени интегрирования
(рис. 3.11) есть время, в течение которого
регулирующее воздействие возрастает
на величину, равную пропорциональной
части. К этому выводу нетрудно прийти,
не прибегая к геометрическим построениям.
Достаточно в уравнении (3.6) положить
![]() ,
тогда
,
тогда
![]()
32. 52. Назначение и функции операционной системы. Классификация и характеристика операционных систем.
Операционная система, ОС - это набор программ, которые обеспечивают возможность использования аппаратуры компьютера. При этом аппаратура компьютера предоставляет лишь вычислительные мощности, задача же ОС заключается в том, чтобы сделать аппаратуру доступной и по возможности удобной для пользователя. ОС обеспечивают также рациональное и координированное управление аппаратурой для достижения высокой производительности. ОС - это по преимуществу администратор ресурсов, она управляет процессорами, памятью, устройствами ввода-вывода и данными.
Назначение
Главное назначение ОС - это управление ресурсами, а главные ресурсы, которыми она управляет, - это аппаратура компьютера:
процессор,
память,
устройства ввода-вывода.
Функции
ОС реализует множество различных функций, в том числе:
определяет так называемый интерфейс пользователя,
обеспечивает разделение аппаратных ресурсов между пользователями,
дает возможность работать с общими данными в режиме коллективного пользования,
планирует доступ пользователей к общим ресурсам,
обеспечивает эффективное выполнение операций ввода-вывода,
осуществляет восстановление информации и вычислительного процесса в случае ошибок.
Требования
Надежностью. Система должна быть, по меньшей мере, так же надежна, как и аппаратура на которой она работает. В случае ошибки в программном или аппаратном оборудовании система должна обнаружить ошибку и либо попытаться исправить положение, либо постараться свести ущерб к минимуму.
Защитой. Система должна быть защищена от несанкционированного доступа.
Эффективностью. ОС представляет собой сложный комплекс программных средств, который использует значительную часть аппаратных ресурсов для своих собственных надобностей. Следовательно, сама система должна быть как можно более экономичной, чтобы большая часть ресурсов оставалась в распоряжении пользователей. Кроме того, система должна управлять ресурсами пользователей так, чтобы свести к минимуму время простоя, или, другими словами, добиться максимальной загруженности ресурса.
Предсказуемостью. Пользователь предпочитает, чтобы обслуживание не слишком сильно менялось в течение продолжительного времени. В частности, запуская программу, пользователь должен иметь представление, основанное на предыдущем опыте, о том, когда ему ожидать выдачи результатов.
Удобством. ОС должна быть достаточно гибкой и удобной для пользователя.
Системы можно разделить на несколько классов.
ДОС (Дисковые Операционные Системы). Это системы, берущие на себя выполнение только первых четырех функций. Как правило, это просто некий резидентный набор подпрограмм, не более того. Он загружает пользовательскую программу в память и передает ей управление, после чего программа делает с системой все, что ей заблагорассудится. Считается желательным, чтобы после завершения программы машина оставалась в таком состоянии, чтобы ДОС могла продолжить работу. (принципиально же, ДОС ничем не может помешать программе перевести систему в нерабочее состояние).
Дисковая операционная система MS DOS для IBM PC является примером систем подобного класса. Она, правда, умеет загружать несколько программ, но не предоставляет средств для исполнения этих программ. Более того, с точки зрения документированных функций, этим программам нельзя работать (существуют, однако, так называемые недокументированные задние двери (backdoors)).
Существование систем такого класса обусловлено их простотой и тем, что они потребляют мало ресурсов. Еще одна причина, по которой такие системы могут использоваться даже на довольно мощных машинах - требование программной совместимости с ранними моделями того же семейства компьютеров.
ОС. К этому классу относятся системы, берущие на себя выполнение всех вышеперечисленных функций. Разделение на ОС и ДОС идет, по-видимому, от систем IBM DOS/360 и OS/360 для больших компьютеров этой фирмы, клоны которых известны у нас в стране под названием ЕС ЭВМ серии 10XX. (Кстати, у IBM была еще TOS/360, Tape Operating System - Ленточная Операционная Система).
Здесь и далее под ОС мы будем подразумевать системы ``общего назначения'', то есть рассчитанные на интерактивную работу одного или нескольких пользователей в режиме разделения времени, при не очень жестких требованиях на время реакции системы на внешние события. Как правило, в таких системах уделяется большое внимание защите самой системы, программного обеспечения и пользовательских данных от ошибочных и злонамеренных программ и пользователей. Обычно такие системы используют встроенные в архитектуру процессора средства защиты и виртуализации памяти. К этому классу относятся такие широко распространенные системы, как VAX/VMS, системы семейства Unix и OS/2, хотя последняя не обеспечивает одновременной работы нескольких пользователей и защиты пользователей друг от друга.
Часто такие системы являются подсистемой ОС общего назначения: MS DOS и MS Windows-эмуляторы под UNIX и OS/2, окно DOS в MS Windows, эмулятор RT-11 в VAX/VMS.
Системы реального времени. Это системы, предназначенные для облегчения разработки так называемых приложений реального времени. Это программы, управляющие некомпьютерным по природе оборудованием, часто с очень жесткими ограничениями по времени. Примером такого приложения может быть программа бортового компьютера крылатой ракеты, системы управления ускорителем элементарных частиц или промышленным оборудованием. Такие системы обязаны поддерживать многопроцессность, гарантированное время реакции на внешнее событие, простой доступ к таймеру и внешним устройствам. Такие системы могут по другим признакам относиться как к классу ДОС (RT-11), так и к ОС (OS-9, QNX). Часто такие системы (например, VxWorks) рассчитаны на работу совместно с управляющей host-машиной, исполняющей "нормальную" операционную систему.
Любопытно, что новомодное течение в компьютерной технике - multimedia - при качественной реализации предъявляет к системе те же требования, что и промышленные задачи реального времени. В multimedia основной проблемой является синхронизация изображения на экране со звуком. Именно в таком порядке. Звук обычно генерируется внешним аппаратным устройством с собственным таймером, и изображение синхронизируется с ним же. Человек способен заметить довольно малые временные неоднородности в звуковом потоке. Напротив, пропуск кадров в визуальном потоке не так заметен, а расхождение звука и изображения заметно уже при задержках около 30 мс. Поэтому системы качественного multimedia должны обеспечивать синхронизацию с такой же или более высокой точностью, что мало отличается от систем мягкого реального времени.
Кросс-загрузчики. Это системы - полностью ориентированные на работу с host-машиной. Чаще всего они используются для написания и отладки кода, позднее прошиваемого в ПЗУ. Это системы программирования микроконтроллеров семейства Intel 8048 и подобных им, TDS (Transputer Development System) фирмы Inmos, и многие другие. Такие системы, как правило, включают в себя набор компиляторов и ассемблеров, работающих на host-системе (реже - загружаемых с host-машины в целевую систему), библиотеки, выполняющие большую часть функций ОС при работе программы (но не загрузку этой программы!), и средства отладки.
Системы промежуточных типов. Существуют системы, которые с первого взгляда нельзя отнести к одному из вышеперечисленных классов. Такова, например, система RT-11, которая, по сути своей, является ДОС, но позволяет одновременное исполнение нескольких программ с довольно богатыми средствами взаимодействия и синхронизации. Другим примером промежуточной системы являются MS Windows 3.x и Windows 95 которые, как ОС, используют аппаратные средства процессора для защиты и виртуализации памяти и даже могут обеспечивать некоторое подобие многозадачной работы, но не защищают себя и программы от ошибок других программ.
В последнее время вошел в употребление еще один термин: сетевые ОС, или сокращенно NOS (Networking Operating System). На взгляд авторов, сложившееся использование этого термина несколько неудачно. Его можно употреблять в двух различных смыслах:
Системы, предназначенные для предоставления сетевых услуг, аналогично тому, как ДОС предназначена для предоставления средств работы с диском. Под такое понимание NOS подходят узкоспециализированные системы, такие как Novell Netware, K9Q или программное обеспечение маршрутизаторов Cisco.
Системы, способные предоставлять сетевые услуги. Под такое определение подходят практически все современные ОС общего назначения.