

22. Системы управления на основе нечеткой логики.
Наиболее поразительным свойством человеческого интеллекта является способность принимать правильные решения в обстановке неполной и нечеткой информации. Построение моделей приближенных рассуждений человека и использование их в интеллектуальных компьютерных системах представляют сегодня одно из самых перспективных направлений развития современной вычислительной техники.
Значительный вклад в это направление внес Л. Заде. Его работа «Fuzzy Sets» явилась толчком к развитию новой математической теории. Заде расширил классическое понятие множества, допустив, что характеристическая функция (функция принадлежности элемента множеству) может принимать любые значения в интервале (0, 1), а не только значения 0 либо 1. Такие множества были названы им нечеткими (fuzzy). Заде определил также ряд операций над нечеткими множествами и предложил обобщение известных методов логического вывода. Введя затем понятие лингвистической переменной и допустив, что в качестве ее значений (термов) выступают нечеткие множества, Заде предложил аппарат для описания процессов интеллектуальной деятельности, включая нечеткость и неопределенность выражений. Это позволило создать фундамент теории нечетких множеств и нечеткой логики, а также предпосылки для внедрения методов нечеткого управления в инженерную практику. Смещение центра исследований нечетких систем в сторону практических приложений привело к постановке целого ряда проблем таких, как новые архитектуры компьютеров для нечетких вычислений, элементная база нечетких компьютеров и контроллеров, инструментальные средства разработки, инженерные методы расчета и разработки нечетких систем управления и многое другое. Математическая теория нечетких множеств позволяет описать нечеткие понятия и знания, оперировать этими знаниями и делать нечеткие выводы. Нечеткое управление оказывается особенно полезным, когда исследуемые процессы являются слишком сложными для анализа с помощью общепринятых методов, или когда доступные источники информации интерпретируются качественно, неточно или неопределенно. Нечеткая логика, предоставляющая эффективные средства отображения неопределенностей и неточностей реального мира, и на которой основано нечеткое управление, ближе к человеческому мышлению и естественным языкам, чем традиционные логические системы.
Нечеткое управление (Fuzzy Control, Fuzzy-управление) в настоящее время является одной из перспективнейших интеллектуальных технологий, позволяющих создавать высококачественные СУ.
Среди причин распространение Fuzzy-управления обычно выделяют следующие:
Особые качества СУ с нечеткой логикой, в частности малая чувствительность к изменению параметров ОУ.
Синтез СУ с нечеткой логикой при применении современных средств аппаратной и программной поддержки зачастую проще, чем традиционных.
Существуют также и нетехнические причины популярности нечетких систем:
Нечеткая логика – технология, появившаяся относительно недавно, и ее применение без труда позволяет достигнуть «патентной чистоты» проектируемых изделий.
Существует определенная «мода» на нечеткие системы.
Как и у любых СУ, у систем с нечеткой логикой существует область, в которой их применение является наиболее предпочтительным. В качестве таких областей обычно выделяют следующие:
Системы регулирования, для которых модель ОУ определена лишь качественно.
Надстройка над традиционными системами регулирования (например, над ПИД-регуляторами) для придания им адаптивных свойств.
Воспроизведение действий человека-оператора.
Системы организационного управления верхнего уровня.
Общей предпосылкой для применения нечетких СУ является, с одной стороны, наличие неопределенности, связанной как с отсутствием информации, так и сложностью системы и невозможностью или нецелесообразностью ее описания традиционными методами и, с другой стороны, наличие об объекте, необходимых управляющих воздействий, возмущениях и т.п. информации качественного характера.
Т
Рис. 1. Области
эффективного применения различных СУ
О сновным
признаком классификации нечетких СУ
является место нахождения блоков
нечеткого логического вывода в СУ: либо
нечеткая система сама формирует
управляющие сигналы, либо сигналы с
нечеткой системы управляют параметрами
традиционной СУ (например, ПИД-контроллером).
К последним также относятся системы с
так называемыми нечеткими комплексными
моделями (либо плавный, либо скачкообразный)
происходит посредством сигналов с
блоков нечеткого вывода.
сновным
признаком классификации нечетких СУ
является место нахождения блоков
нечеткого логического вывода в СУ: либо
нечеткая система сама формирует
управляющие сигналы, либо сигналы с
нечеткой системы управляют параметрами
традиционной СУ (например, ПИД-контроллером).
К последним также относятся системы с
так называемыми нечеткими комплексными
моделями (либо плавный, либо скачкообразный)
происходит посредством сигналов с
блоков нечеткого вывода.
СУ с нечеткой логикой можно разделить также на неадаптивные и адаптивные. В неадаптивных база знаний после подстраивается в процессе работы в зависимости от складывающейся в процессе управления ситуации. При адаптивном подходе к построению нечетких СУ настройка блоков нечеткого логического вывода осуществляется не только в процессе проектирования, но и во время нормальной эксплуатации системы, параллельно с процессом управления объектом. Адаптивные системы позволяют осуществлять более качественное управление сложными нестационарными объектами по сравнению с обычными системами.
Независимо от того, адаптивной или нет является нечеткая СУ, основным вопросом при ее проектировании является формирование базы знаний в виде нечетки продукционных правил.
Три наиболее известных подхода к построению нечетких адаптивных СУ – это инверсное управление, предикатное управление (управление с предсказанием), схема управления с обратной связью и идентификатором.
Примеры СУ с нечеткое логикой
Нечеткий регулятор
Р
Рис. 2.
Структура замкнутой системы управления ассмотрим
замкнутую систему регулирования,
представленную на рис. 2,
где через О
обозначен объект управления,
через Р —
регулятор а через и у, е, х — соответственно,
входной сигнал системы, ее выходной
сигнал, сигнал ошибки (рассогласования),
поступающий на вход регулятора, и
выходной сигнал регулятора.
В
рассматриваемой системе
регулятор вырабатывает управляющий
сигнал х в соответствии с выбранным
алгоритмом регулирования например,
пропорционально
сигналу ошибки,
либо ее интегралу и т.п.
Предположим
что функции регулятора выполняет
микроконтроллер, при этом аналоговый
сигнал е ограничен диапазоном [-1,
1] и преобразуется в цифровую
форму аналого-цифровым преобразователем
(АЦП) с дискретностью 0,25, а
выходной сигнал регулятора х формируется
с помощью цифро-аналогового преобразователя
и имеет всего 5 уровней:
-1, -0,5; 0, 0,5; 1. Принимая
во внимание данные уровни, введем
лингвистические переменные:
А1:
большой положительный,
А2:
малый положительный,
А3:
нулевой,
А4
малый отрицательный
А5:
большой отрицательный,
ассмотрим
замкнутую систему регулирования,
представленную на рис. 2,
где через О
обозначен объект управления,
через Р —
регулятор а через и у, е, х — соответственно,
входной сигнал системы, ее выходной
сигнал, сигнал ошибки (рассогласования),
поступающий на вход регулятора, и
выходной сигнал регулятора.
В
рассматриваемой системе
регулятор вырабатывает управляющий
сигнал х в соответствии с выбранным
алгоритмом регулирования например,
пропорционально
сигналу ошибки,
либо ее интегралу и т.п.
Предположим
что функции регулятора выполняет
микроконтроллер, при этом аналоговый
сигнал е ограничен диапазоном [-1,
1] и преобразуется в цифровую
форму аналого-цифровым преобразователем
(АЦП) с дискретностью 0,25, а
выходной сигнал регулятора х формируется
с помощью цифро-аналогового преобразователя
и имеет всего 5 уровней:
-1, -0,5; 0, 0,5; 1. Принимая
во внимание данные уровни, введем
лингвистические переменные:
А1:
большой положительный,
А2:
малый положительный,
А3:
нулевой,
А4
малый отрицательный
А5:
большой отрицательный,
и на дискретном множестве возможных значений сигнала рассогласования е определим функцию принадлежности так, как это приведено в табл. 1.
|
-1 |
-0,75 |
-0,5 |
-0,25 |
0 |
0,25 |
0,5 |
0,75 |
1 |
А1(е) |
0 |
0 |
0 |
0 |
0 |
0 |
0,3 |
0,7 |
1 |
А2(е) |
0 |
0 |
0 |
0 |
0,3 |
0,7 |
1 |
0,7 |
0,3 |
А3(е) |
0 |
0 |
0,3 |
0,7 |
1 |
0,7 |
0,3 |
0 |
0 |
А4(е) |
0,3 |
0,7 |
1 |
0,7 |
0,3 |
0 |
0 |
0 |
0 |
А5(е) |
1 |
0,7 |
0,3 |
0 |
0 |
0 |
0 |
0 |
0 |
Предположим далее, что функционирование регулятора определяется следующими правилами (надо сказать типичными для задачи управления):
П1: если е = Аз и Δе = Аз, то х = 0, П2: если е = А2 и Δе = А2, то х = -0,5, П3: если е = А4 и Δе = А4, то х = 1, П4: если е = А1 и Δе=А1, то х = -1,
где Δе - первая разность сигнала ошибки в текущий дискретны момент времени.
Заметим, что набор правил может быть, вообще говоря, и каким-то другм. Если например, используется упрощенный алгоритм нечеткого вывода, то при значениях, скажем е = -0,25 и Δе = 0,5 имеем
α1= min(0,7; 0,3)=0,3 и х1=0
α2 = min(0,7; 1)=0,7 и х2= - 0,5
α 3 =min(0; 0,)=0 и х3=1
α4= min(0; 0,3)=0,3 и х4= -1
и выход регулятора
![]()
Аналогичным образом значения выходного сигнала регулятор рассчитываются при других значениях е и Δе.
Отметим, что при проектировании подобных («нечетких») регуляторов основным (и не формализуемым) этапом является задания набора нечетких правил. Другие аспекты: выбор формы функций принадлежности, алгоритма приведения к четкости и т. п. представляются задачами более простыми.
Моделирование работы светофора на основе нечеткой логики
В обычном светофоре время работы зеленого и красного света, а также время цикла фиксированы. Это создает некоторые трудности в движении машин, особенно, при изменении их потоков в часы пик, что довольно часто приводит к появлению автомобильных пробок.
В предлагаемом нечетком светофоре время цикла остается постоянным, однако, время его работы в режиме зеленого света должно меняться в зависимости от количества подъезжающих к перекрестку машин.
П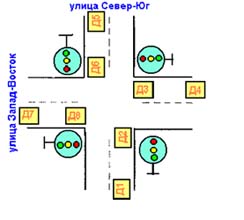 усть
время цикла традиционного и нечеткого
светофоров будет одинаковым и равным
1мин.=60сек. Длительность зеленого света
обычного светофора зададим 30сек., тогда
красный свет будет гореть тоже 30сек.
усть
время цикла традиционного и нечеткого
светофоров будет одинаковым и равным
1мин.=60сек. Длительность зеленого света
обычного светофора зададим 30сек., тогда
красный свет будет гореть тоже 30сек.
Для работы нечеткого светофора на перекрестке улиц Север-Юг (СЮ) и Запад-Восток (ЗВ) необходимо установить 8 датчиков (рис.1), которые считают проехавшие мимо них машины.
Рис.1. Расположение датчиков на перекрестке.
Светофор использует разности показаний четырех пар датчиков: (Д1-Д2), (Д3-Д4), (Д5-Д6) и (Д7-Д8). Таким образом, если для улицы СЮ горит зеленый свет, машины проезжают перекресток и показания двух пар датчиков равны: Д1=Д2, Д5=Д6, а, следовательно, их разность равна нулю. В это же время на улице ЗВ перед светофором останавливаются машины, которые успели проехать только Д4 и Д7. В результате можно рассчитать суммарное количество автомобилей на этой улице следующим образом: (Д4-Д3)+(Д7-Д8)=(Д4-0)+(Д7-0)=Д4+Д7.
Для сравнения работы обоих светофоров введем показатель эффективности, в качестве которого будем рассматривать число машин, не проехавших перекресток за один цикл светофора.
Данную задачу можно сравнить с системой массового обслуживания (СМО), по двум каналам которой поступают заявки на обслуживание в виде автомашин. Показатель эффективности в этом случае число заявок, получивших отказ.
РЕШЕНИЕ :
Более подробно рассмотрим проектирование нечеткой подпрограммы. Здесь однозначно должны быть определены все входы и выходы.
Поскольку работа светофора зависит от числа машин на обеих улицах и текущего времени зеленого света, для нашей подпрограммы предлагается использовать 3 входа: число машин на улице СЮ по окончанию очередного цикла, число машин на улице ЗВ по окончанию цикла и время зеленого света нечеткого светофора.
Т еперь
для каждой переменной надо задать
лингвистические термы, соответствующие
некоторым диапазонам четких значений.
Так, для переменной время зеленого света
предлагается использовать три терма
(рис.2):
еперь
для каждой переменной надо задать
лингвистические термы, соответствующие
некоторым диапазонам четких значений.
Так, для переменной время зеленого света
предлагается использовать три терма
(рис.2):
Рис.2. Функция принадлежности
малое (10-25сек.);
среднее(20-40сек.); первой входной переменной
б
 ольшое(35-50сек.).
ольшое(35-50сек.).
Степень принадлежности четких значений термам задается с помощью функций принадлежности (в нашем случае эти функции имеют форму трапеции).
Аналогично, термы для двух оставшихся переменных будут (рис.3):
очень малое (0-18);
малое (16-36);
с
 реднее
(34-56);
реднее
(34-56);
большое (54-76);
очень большое (72-90).
Рис.3. Функция принадлежности второй и третьей входных переменных.
Функции принадлежности здесь также имеют форму трапеции.
Так как суть работы светофора состоит в изменении времени зеленого света, в качестве выходного параметра предлагается использовать величину этого изменения. Термы в этом случае будут следующие (рис.4):
уменьшить (-20-0сек.);
не изменять (-15-15сек.);
увеличить (0-20сек.).
Рис.4. Функция принадлежности выходной переменной.
Функции принадлежности имеют форму Гаусса.
Кроме того, в подпрограмму записывается таблица правил на основе условных высказываний, которая формирует выходное значение исходя из величин входных параметров, например: Если (число машин на улице СЮ=малое)&(число машин на улице ЗВ=большое)&(время зеленого света на улице СЮ=большое), то (время зеленого света=уменьшить).