

Вопросы на гэк 2012
1. Нелинейные сар. Понятия: «пространство состояний», «фазовая траектория», «фазовый портрет».
Для наглядного представления о сложных нелинейных процессах регулирования часто прибегают к понятию пространства состояний, или фазового пространства, которое заключается в следующем.
Дифференциальное уравнение 3-го порядка (мы взяли 3-ий порядок для возможности геометрической иллюстрации процессов, в общем же случае речь может идти о «n»-м порядке) замкнутой САР, представленное в форме Коши, имеет вид
![]()
при
![]()
Здесь
![]() - отклонения переменных системы от их
установившихся значений;
- отклонения переменных системы от их
установившихся значений;
![]() -
любые функции (в том числе нелинейные)
от этих переменных.
-
любые функции (в том числе нелинейные)
от этих переменных.
П еременные
еременные
![]() могут иметь различной физический смысл,
однако здесь мы будем представлять их
как координаты некоторого ортогонального
трехгранника. В реальном процессе
регулирования в каждый момент времени
переменные
имеют вполне определенные значения.
Это соответствует вполне определенному
положению
могут иметь различной физический смысл,
однако здесь мы будем представлять их
как координаты некоторого ортогонального
трехгранника. В реальном процессе
регулирования в каждый момент времени
переменные
имеют вполне определенные значения.
Это соответствует вполне определенному
положению
![]() в этом трехмерном пространстве.
в этом трехмерном пространстве.
С течение времени
в реальном процессе координаты
определенным образом изменяются. Это
соответствует перемещению т. М в
пространстве по определенным траекториям.
Следовательно, траектория движения т.
М может служить наглядной геометрической
иллюстрацией динамического поведения
системы в процессе регулирования. Точка
М называется изображающей точкой, ее
траектория называется фазовой траекторией,
а пространство
![]() -
фазовым пространством. Фазовое
пространство, заполненное фазовыми
траекториями для различных начальных
условий, называется фазовым портретом.
Итак, фазовое пространство и фазовые
траектории представляют собой лишь
геометрический образ динамических
процессов, протекающих в системе. В этом
геометрическом представлении участвуют
координаты и исключено время. Фазовая
траектория сама по себе дает лишь
качественное представление о характере
поведения системы.
-
фазовым пространством. Фазовое
пространство, заполненное фазовыми
траекториями для различных начальных
условий, называется фазовым портретом.
Итак, фазовое пространство и фазовые
траектории представляют собой лишь
геометрический образ динамических
процессов, протекающих в системе. В этом
геометрическом представлении участвуют
координаты и исключено время. Фазовая
траектория сама по себе дает лишь
качественное представление о характере
поведения системы.
Выше говорилось,
что уравнения нелинейной системы (1)
составлены в отклонениях от установившегося
состояния, которое характеризуется
![]() .
Следовательно, изображением установившегося
состояния системы является начало
координат. Отсюда вытекает, если
использовать определение устойчивости
по Ляпунову, что если фазовые траектории
с течением времени стягиваются к
некоторой малой окрестности
.
Следовательно, изображением установившегося
состояния системы является начало
координат. Отсюда вытекает, если
использовать определение устойчивости
по Ляпунову, что если фазовые траектории
с течением времени стягиваются к
некоторой малой окрестности
![]() вокруг начала координат, то система
устойчива. Если же
вокруг начала координат, то система
устойчива. Если же
![]() фазовые
траектории приходят строго в начало
координат, то имеет место асимптотическая
устойчивость. И, наконец, если при
фазовые
траектории неограниченно удаляются от
начала координат, то САР неустойчива.
фазовые
траектории приходят строго в начало
координат, то имеет место асимптотическая
устойчивость. И, наконец, если при
фазовые
траектории неограниченно удаляются от
начала координат, то САР неустойчива.
2. Проблема двойственности в линейном программировании.
С каждой задачей линейного программирования можно связать некоторую другую задачу, называемую двойственной. Первоначальную задачу при этом называют исходной. Оптимальный план одной из задач тесно связан с оптимальным планом другой задачи. Рассмотрим двойственную задачу в общей постановке.
1. Пусть ограничения исходной задачи имеют вид(1):

На множестве решений этой системы требуется максимизировать функцию
![]()
Двойственной для этой задачи будет задача с ограничениями
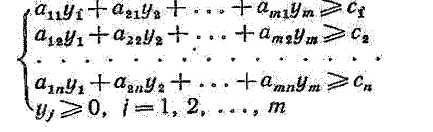
И минимизируемой целевой функцией
![]()
Сравним обе задачи, нетрудно заметить, что:
1. Матрица из коэффициентов при переменных в исходной задаче

И аналогичная матрица в двойственной задаче

получаются друг из друга простой заменой строк столбцами с сохранением их порядка. Такая операция получила название транспонирование.
2. В исходной задаче n переменных и m ограничений» в двойственной—m переменных и n ограничений.
3. В правых частях систем ограничений каждой из задач стоят коэффициенты целевой функции, взятой из другой задачи.
4. В систему
ограничений исходной задачи входят
неравенства типа
![]() ,
причем в задаче требуется максимизировать
целевую функцию F.
В систему ограничений двойственной
задачи входят неравенства типа
,
причем в задаче требуется максимизировать
целевую функцию F.
В систему ограничений двойственной
задачи входят неравенства типа
![]() ,
причем в двойственной задаче требуется
минимизировать целевую функцию.
,
причем в двойственной задаче требуется
минимизировать целевую функцию.
Исходная к двойственная ей задачи образуют пару задач, называемую в линейном программировании двойственной парой. Следует заметить, что за исходную задачу можно взять любую задачу из этой пары, для дальнейшего решения это несущественно.
Следующая таблица значительно облегчает процесс составления математической модели двойственной задачи.

В первой строке таблицы записываются все переменные исходной задачи, в первом столбце записываются все переменные двойственной задачи. В последней строке стоят коэффициенты целевой функции исходной задачи, в последнем столбце коэффициенты целевой функции двойственной задачи. В прямоугольнике, который получился в результате ограничения указанными строками и столбцами, записаны коэффициенты при переменных исходной задачи —эго матрица исходной задачи.
Чтобы получить, например, первое ограничение двойственной задачи, надо найти сумму произведений чисел, стоящих в столбце под х1 на соответствующие переменные первого столбца: а11у1+а21у2+…+аm1ym. Считаем, что эта сумма не меньше с1: а11у1+а21у2+…=аm1ym с1.
Аналогично составляются и остальные ограничения для двойственной задачи. При этом устанавливается такое соответствие:
1)переменной х1 исходной задачи соответствует первое ограничение двойственной задачи, переменной х2 - второе ограничение двойственной задачи и т. д., переменной хn -последнее ограничение двойственной задачи и наоборот;
2)переменной у1. двойственной задачи соответствует первое ограничение исходной задачи и т. д., переменной уm двойственной задачи соответствует последнее ограничение исходной задачи.
Выражение для целевой функции получается как сумма произведений переменных первого столбца на соответствующие числовые значения последнего столбца.
Если система ограничений исходной задачи на максимум, кроме неравенств типа , содержит неравенства типа , то перед построением двойственной задачи левые и правые части неравенств типа необходимо умножить на -1. А в задаче на минимум неравенства типа умножаем на -1. Если в исходной задаче имеются ограничения, заданные равенствами то каждое из них заменяется двумя ограничениями-неравенствами, а затем в зависимости от типа задач поступают, как было сказано выше Например, пусть в систему ограничении исходной задачи на максимум входит уравнение: 2х1+3х2+5х3-= 12.
Легко видеть, что

Уравнения (1) в системе ограничений исходной задачи на максисмум должны быть типа , а в задаче на минимум – типа .