

2.6.5. Форсирующее звено
Форсирующим звеном или форсирующим звеном первого порядка называют звено, которое описывается уравнением
y = k(Tp + 1)u,
или, что то же, передаточной функцией
W(s) = k(Ts + 1).
Это звено, как и апериодическое, характеризуется двумя параметрами: постоянной времени Т и передаточным коэффициентом k.
Частотная передаточная функция
W(j) = k(Tj + 1).
Остальные частотные и передаточные функции имеют вид:
U() = k,
V() = kT,
![]() ,
() = arctgT,
,
() = arctgT,
![]() ,
h(t) = k[T(t) + 1(t)],
(t) = k[T'(t) + (t)],
,
h(t) = k[T(t) + 1(t)],
(t) = k[T'(t) + (t)],
а б
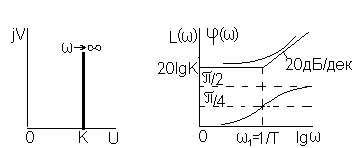
Рисунок 2.8
АФЧХ (рис. 2.8, а) - это прямая, параллельная мнимой оси и пересекающая действительную ось в точке U = k. ЛАЧХ изображена на рис. 2.8, б. Как и в случае апериодического звена на практике ограничиваются построением асимптотической ЛАЧХ. Частоту 1 = 1/T, соответствующую точке излома этой характеристики, называют сопрягающей частотой.
Уравнение асимптотической ЛАЧХ форсирующего звена имеет вид
![]()
Асимптотическая ЛАЧХ при < 1 параллельна оси частот и пересекает ось ординат при L = 20lgk, а при 1 имеет наклон 20дБ/дек.
ЛФЧХ форсирующего звена можно получить зеркальным отражениям относительно оси частот ЛФЧХ апериодического звена для её построения можно пользоваться теми же шаблоном и номограммой.
2.6.6. Колебательное, консервативное и апериодическое второго порядка звенья
Звено, которое можно описать уравнением
(T20p2 + T1p + 1)y = ku
или
(T2p2 + 2Tp + 1)y = ku,
где
T = T0, = T1/2T, или передаточной функцией
![]()
называют колебательным, если 0 < < 1, консервативным, если = 0 (T1 = 0), и апериодическим звеном второго порядка, если 1. Коэффициент называют коэффициентом демпфирования.
2.6.7. Колебательное звено ( 0 < < 1)
Частотная передаточная функция
![]()
Умножив числитель и знаменатель на комплексно-сопряженное знаменателю выражение, получим вещественную и мнимую частотные функции
![]() ,
,
![]()
Фазовая частотная функция, как видно из рис. 2.9, а АФЧХ, изменяется монотонно от 0 до - и выражается формулой

а б в
Рисунок 2.9
![]()
ЛФЧХ (рис. 2.9, б) при асимптотически стремится к оси частот, а при - к прямой
Амплитудная частотная функция
![]()
и логарифмическая амплитудная функция
![]()
Уравнение асимптотической ЛАЧХ имеет вид
![]()
где 1 = 1/T, 1 - сопрягающая частота. Асимптотическая ЛАЧХ (рис. 2.9, б) при < 1 параллельна оси частот, а при 1 имеет наклон -40дБ/дек.
Решением уравнения (T20p2 + T1p + 1)y = ku колебательного звена при u = 1(t) и нулевых начальных условиях (y(0) = y'(0) = 0). И найдем переходную функцию.
![]()
где
![]()
Весовая функция
![]()
По переходной характеристике (рис. 2.9, в) можно определить параметры колебательного звена следующим образом. Передаточный коэффициент k определяют по установившемуся значению, h() переходной функции. Постоянную времени Т и коэффициент демпфирования можно найти из уравнений
Tк = 2, A1/A2 = eTк
или
= 2/Tк, = 1/TкlnA1/A2,
где Тк - период колебаний, А1 и А2 - амплитуды двух соседних колебаний относительно установившегося значения (рис. 2.9, в).
2.6.8. Консервативное звено ( = 0 )
Передаточная функция
W(s) = k/(T2s2 + 1).
Частотная передаточная функция
W(j) = k/(1-T22)
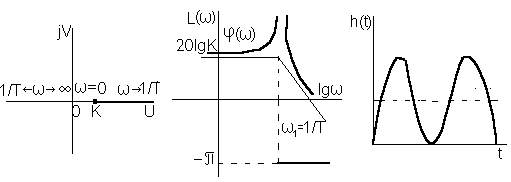
а б в
Рисунок 2.10
Фазовая частотная функция, как это следует из АФЧХ (рис. 2.10, а)
![]()
ЛЧХ приведены на рис. 2.10, б.
Переходная функция
h(t) = k(1-cos1t), 1 = 1/T.
Переходная характеристика (рис. 2.10, в) представляет собой график гармонических колебаний.