

Силовой анализ механизмов
2. Силы инерции звеньев плоских механизмов
Силы
инерции звеньев рассматриваются как
реакции звена на изменение его скорости
по величине и направлению. Существование
сил инерции обусловлено двумя
обстоятельствами: фактом наличия у
звеньев массы и фактом движения звеньев,
сопровождающегося в общем случае
ускорениями отдельных точек и всего
звена в целом, так как известно из
теоретической механики, что мерой сил
инерции является произведение массы
на ускорение.
Из
курса теоретической механики известно,
что систему сил инерции в общем случае
можно привести к силе – главному вектору
сил инерции ![]() приложенного
в центре масс s звена
(рис. 11.6) и к паре сил, момент которой
называется главным моментом сил
инерции
приложенного
в центре масс s звена
(рис. 11.6) и к паре сил, момент которой
называется главным моментом сил
инерции ![]() .
.
 Рис.
11.6
Главный
вектор сил инерции определяют по
формуле:
Рис.
11.6
Главный
вектор сил инерции определяют по
формуле:
![]() .
Главный
момент сил инерции определяют по
формуле:
.
Главный
момент сил инерции определяют по
формуле:
![]() ,
где m –
масса звена, кг; аs –
ускорение цента масс, м/с2; Js –
момент инерции звена относительно оси
проходящей через центр масс перпендикулярной
плоскости движения, кг/м2;
e - угловое ускорение звена, с-2.
Знак
«-» указывает на то, что
векторы
и
соответственно
направлены противоположно аs и
e.
Силы
инерции звеньев совершающих вращательное
движение
При
равномерном вращательном движении
звеньев имеющих цилиндрическую форму
(рис. 11.7, а)
имеем:
,
где m –
масса звена, кг; аs –
ускорение цента масс, м/с2; Js –
момент инерции звена относительно оси
проходящей через центр масс перпендикулярной
плоскости движения, кг/м2;
e - угловое ускорение звена, с-2.
Знак
«-» указывает на то, что
векторы
и
соответственно
направлены противоположно аs и
e.
Силы
инерции звеньев совершающих вращательное
движение
При
равномерном вращательном движении
звеньев имеющих цилиндрическую форму
(рис. 11.7, а)
имеем: ![]() и
и ![]() ,
так как соответственно аs =
0 и e = 0.
При
неравномерном вращении звеньев имеющих
цилиндрическую форму имеем:
,
так как соответственно аs =
0 и e = 0.
При
неравномерном вращении звеньев имеющих
цилиндрическую форму имеем: ![]() так
как аs =
0 и
так
как аs =
0 и ![]() ,
т.к. e ¹ 0.
,
т.к. e ¹ 0.
 Рис.
11.7
При
равномерном вращении кривошипа (рис.
11.7, б)
имеем:
Рис.
11.7
При
равномерном вращении кривошипа (рис.
11.7, б)
имеем: ![]() так
как аs ¹
0 и
,
т.к. e = 0.
При
неравномерном вращении кривошипа (рис.
11.7, в) имеем:
так
как аs ¹
0 и
,
т.к. e ¹ 0. Для удобства расчетов данную
систему принято заменять одной
результирующей силой инерции
приложенной
в центре качания К,
расположение которой определяют из
выражения:
так
как аs ¹
0 и
,
т.к. e = 0.
При
неравномерном вращении кривошипа (рис.
11.7, в) имеем:
так
как аs ¹
0 и
,
т.к. e ¹ 0. Для удобства расчетов данную
систему принято заменять одной
результирующей силой инерции
приложенной
в центре качания К,
расположение которой определяют из
выражения:
![]() .
Силы
инерции звеньев совершающих поступательное
движение
Если
звено совершает только поступательное
движение (рис. 11.8) то:
.
Силы
инерции звеньев совершающих поступательное
движение
Если
звено совершает только поступательное
движение (рис. 11.8) то: ![]() и
,
так как e = 0.
и
,
так как e = 0.
 Рис.
11.8
Силы
инерции звеньев совершающих
плоско-параллельное движение
При
сложном плоско-параллельном движении
звена, например шатуна в кривошипно-ползунном
механизме (рис. 11.9), возникают главный
вектор сил инерции
Рис.
11.8
Силы
инерции звеньев совершающих
плоско-параллельное движение
При
сложном плоско-параллельном движении
звена, например шатуна в кривошипно-ползунном
механизме (рис. 11.9), возникают главный
вектор сил инерции ![]() и
главный момент сил инерции
и
главный момент сил инерции ![]() .
Для
удобства расчетов данную систему принято
заменять одной результирующей силой
инерции
приложенной
в центре качания К,
имеющей плечо относительно центра масс
равное
.
Для
удобства расчетов данную систему принято
заменять одной результирующей силой
инерции
приложенной
в центре качания К,
имеющей плечо относительно центра масс
равное ![]() и
создающей момент в направлении обратном
угловому ускорению шатуна e2.
и
создающей момент в направлении обратном
угловому ускорению шатуна e2.
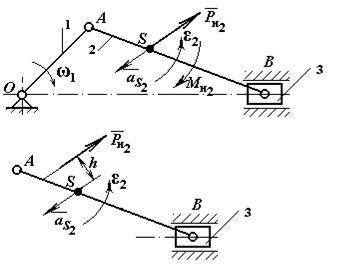 Рис.
11.9
Рис.
11.9
3. Условие кинетостатической определимости плоских кинематических цепей.
Сила, как векторная величина характеризуется относительно звеньев механизма тремя параметрами: координатами точки приложения, величиной и направлением. Рассмотрим с этих позиций реакции в кинематических парах плоских механизмов. Число неизвестных, определенных из какой-либо сис-
темы уравнений, должно совпадать с числом уравнений.
Поэтому прежде, чем определять реакции в кинематических
парах, необходимо проверить условие кинетостатической
определимости цепи.
Для каждого звена кинематической цепи, имеющего
плоскопараллельное движение, можно записать три уравне-
ния равновесия. Для n звеньев цепи число уравнений будет
3n. Число неизвестных для каждой пары V класса равно
двум: модуль реакции и угол a (рис.2.3,а). Для высшей пары
– одному: модуль реакции (рис.2.3,б).
И условие кинетостатической определимости для пло-
ской кинематической цепи:
5 4
3n = 2 p - p . (2.3)
А для группы Ассура, где одни низшие пары: 3n = 2 p5


2.3а 2.3б
При силовом анализе механизмов (определении неизвестных сил, действующих на движущиеся звенья) можно использовать уравнения (законы) статики. Докажем это положение, проанализировав реакции в кинематических парах (табл.).
Кинематические пары |
Равновесие каждого звена |
Известные параметры |
Неизвестные параметры |
5-й класс
Вращательная |
|
Точка приложения |
Величина, направление |
Поступательная |
|
Направление |
Величина, точка приложения |
4-й класс
|
|
Точка приложения, направление |
Величина |





Примечание. 2, 3, 5 – номера звеньев.
В кинематических парах 5-го класса известно по одному параметру сил реакций, неизвестны два, в кинематических парах 4-го класса известны два параметра, а неизвестен один.
Таким образом, плоская кинематическая цепь, состоящая из кинематических пар 5-го и 4-го классов, имеет 2Р5 + Р4 неизвестных величин сил реакций.
В то же время для одного звена можно составить 3 уравнения статики, а для n звеньев – 3n уравнений статики.
Кинематическая цепь будет статически определима, если число неизвестных величин сил реакций не превышает числа возможных уравнений статики, т.е.
3n = 2P5 + Р4.
Это и есть условие статической определимости кинематической цепи.
Полученное равенство можно записать в виде
3n – 2Р5 – Р4 = 0.
Но запись слева от знака равенства является числом степеней свободы кинематической цепи W, т.е.
W = 3n – 2Р5 – P4 = 0.
Как известно таким свойством (W=0) обладают структурные группы, или группы Ассура – статически определимые кинематические цепи.
Пример 1.
Задан шестизвенный рычажный механизм (рис. 4.4), состоящий из начального механизма (звенья 0 и 1) и структурных групп, образованных звеньями 2 и 3 (двухповодковая структурная группа 2-го класса, 1-го вида) и 4, 5 (структурная группа 2-го класса, 2-го вида).

Рис. 4.4. Шестизвенный рычажный механизм
Решение.
Проводим силовой расчёт структурной группы 4-5 (определяем неизвестные реакции, если известны внешние силы, действующие на звенья 4 и 5):
Проводим силовой расчёт структурной группы 2-3:

Проводим силовой расчёт ведущего звена:
