

13. Роторные машины.
Термин ро́тор имеет несколько значений:
тело, которое при вращении удерживается своими несущими поверхностями в опорах;
автоматически управляемая машина (транспортное устройство, прибор), в которой заготовки двигаются вместе с обрабатывающими их орудиями по дугам окружности;
вращающаяся часть в двигателе;
вращающаяся часть электрической машины.
Интеллектуальные технологии являются наиболее перспективным направлением развития практически всех областей науки и техники, в том числе и машиностроения. Интегрирование механических, пневмогидравлических, электрических, электромагнитных и компьютерных систем обеспечивает синергетический эффект в повышении технико-экономических характеристик, надежности и конкурентоспособности изделий. Умные машинные технологии качественно повышают спектр возможностей машин на основании объединения функций автоматического контроля и диагностики параметров, активного управления движением отдельных элементов и объекта в целом, возможности адаптации к изменению условий работы.
Можно выделить три базовых уровня интеллектуализации машин:
1.Механические, гидравлические и другие устройства, оснащенные сенсорными элементами, обеспечивающими контроль и диагностику работоспособности.
2.Совокупность элементов первого уровня совместно с микроконтроллерами, воспроизводящими функции программного управления и автоматизации.
3.Машины, имеющие компьютерное управление на основе сложных математических моделей, способное осуществлять самодиагностику и адаптироваться к неопределенности внешней среды.
В настоящее время практически во всех технических системах используются мехатронные устройства с активным управлением (рис. 13.1). В автомобилях это навигационные и тормозные системы, приборы для ночного движения и парковки, управление работой двигателя и климатконтроль в салоне. Робототехника представляет собой самостоятельное весьма разветвленное направление исследований, включающее технологические, транспортные, бытовые, военные и другие аспекты. Интеллектуальные системы входят в состав аудиа - и видеотехники, полиграфического и офисного оборудования, а также практически всех видов транспортной техники. Особо важную роль умные устройства играют в системах навигации, управления и безопасности ракетно-космической и авиационной техники.
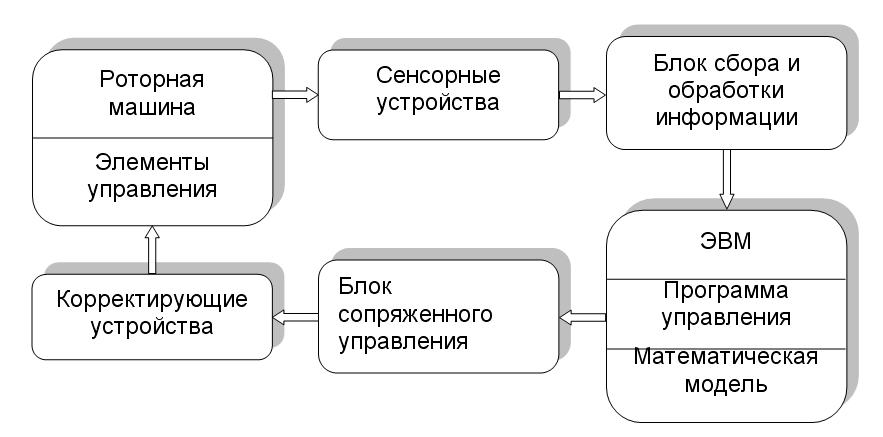
Рисунок 13.1 – Принципиальная схема активного управления
Роторные системы входят в состав энергетических, транспортных, технологических машин и составляют основу для передачи всех видов вращательного движения (рис. 13.2). Ротор представляет собой вал с установленными на нем рабочими колесами – диски с лопатками, крыльчатки компрессоров и турбин, зубчатые шестерни, шкивы, звездочки, полумуфты и т.д. Применение мехатронных технологий в роторных машинах связано с расширением функций диагностики параметров вращательного и поступательного движений, работоспособности подшипниковых узлов, уплотнений подвижных стыков, демпферов, состояния рабочих колес, тормозных устройств, смазочно-охлаждающих систем, элементов привода. Следующий этап заключается в активном управлении параметрами функционирования с использованием сенсоров, контроллеров, управляющих компьютерных программ и корректирующих устройств, в качестве которых могут быть сервоприводы, пьезоэлектрические элементы, шаговые электродвигатели, прецизионные передачи, электромагнитные механизмы, аппараты с эффектом памяти формы и другие.
Силовые потоки в современных машинах передаются в основном посредством вращательного движения ротора в опорах, которые в полной мере можно назвать критическими элементами, во многом определяющими удельные показатели и работоспособность машин. Основной функцией опор роторов является обеспечение несущей способности и демпфирующих свойств, которые являются базовыми характеристиками традиционных видов подшипников. В настоящее время наибольшее распространение получили подшипники качения, которые являются стандартными изделиями и выпускаются специализированными предприятиями.

Рисунок 13.2 – Системы и элементы роторных машин
В промышленном оборудовании, где требования к надежности и точности, при уменьшении массы и габаритов, все больше увеличиваются, применение новых технологий желательно, а иногда просто необходимо. Многие мехатронные подшипниковые узлы, такие как Active Sensor Bearing (ASB), Sensor Line Encoder компании SNR Group (рисунок 13.3) содержат интегрированные датчики, позволяющие контролировать следующие параметры: угловое положение, скорость, направление вращения, количество оборотов, температуру. Обладающие компактностью и высокой надежностью работы в сложных окружающих условиях, они сейчас вызывают большой интерес в различных сферах промышленности: в механических трансмиссиях, в конвейерах, в робототехнике, в транспортных средствах, в погрузочно-разгрузочном оборудовании, в системе управления электродвигателями c преобразователями частоты вращения, в системах контроля, измерения и позиционирования.
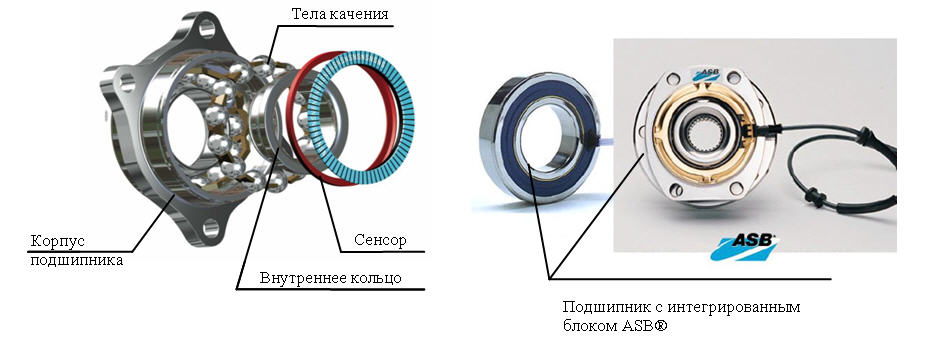
Рисунок 13.3 – Мехатронные подшипники качения
Создание роторных машин новых поколений формирует новые требования к подшипниковым узлам, а именно:
Выполнение новых функциональных задач контроля и диагностики параметров, управление параметрами движения с использованием сенсорных элементов, микропроцессоров и специальных устройств коррекции параметров.
Обеспечение сверхвысоких скоростей вращения ротора с минимальными энергозатратами, максимальными показателями устойчивости, надежности и экологической чистоты, что гарантирует достижение высокого уровня конкурентоспособности.
3. Возможность получения прецизионных движений ротора с целью реализации новых перспективных микро- и нанотехнологий.
4. Реализация интеллектуального поведения роторной системы в условиях неопределенности внешней среды, в частности, при возникновении автоколебательных режимов, параметрических и хаотических колебаний.
5. Обеспечение вращательных и поступательных движений элементов роторной системы по сложным траекториям и законам изменения параметров.
6. Реализация сложных кинематических структур роторно-опорных узлов машин новых поколений, обеспечивающих качественно более высокие показатели.