

Этап 2. Синтез алгоритма управления рабочим циклом установки.
Шаг 2.1. Произвести выбор аппаратов и элементов схемы управления, необходимых для реализации условий управления, приема, обработки и передачи сигналов к электроприемникам. Дать элементам буквенное обозначение согласно действующему ГОСТ.
ПРАВИЛО 5. В каждом фиксированном положении перемещающихся механизмов (заслонок, мобильных кормораздатчиков и т. п.) необходимо установить датчик пути (конечный выключа-тель) и каждое фиксированное значение параметра (уровень, темпера тура и т. п.) контролируется соответствующим датчиком.
Выбираем:
а) исполнительные элементы для включения М на вращение в двух направлениях необходимо выбрать реверсивный магнитный пускатель, который имеет две катушки, КМ) включает М на открытие ЗБ, а КМ2 на закрытие.
б) командные элементы управление магнитными пускателями в ручном и полуавтоматическом режимах осуществляется с помощью
кнопок управления: SB1 «СТОП»; SB2 «ПУСК ВПЕРЕД» (открытие ЗБ); SB3 —кнопка «ПУСК НАЗАД» (закрытие ЗБ).
Для выполнения условия включения установки при наличии зерна в бункере (полуавтоматический и автоматический режимы) необходим датчик нижнего уровня зерна SL1 (см. правило 5), который будет подавать сигналы в схему управления, а для управления в третьем технологическом режиме требуется датчик верхнего уровня SL2 (условие: при Б).
Выключение М в режимах ПА, А1, А2 осуществляется после выполнения условия полного завершения перемещения ЗБ, следовательно (см. правило 5), необходимо установить датчики пути (конечные выключатели), фиксирующие крайние положения ЗБ: закрытое SQ1, открытое SQ2.
Для управления в режиме А1 необходим элемент, подающий в схему сигналы, соответствующие началу и окончанию временного промежутка (300 с). Выбираем программное реле времени (допустим 2РВМ) КТ;
в) защитные элементы для защиты двигателя от короткого
замыкания выбираем автоматический выключатель QF с токовой защитой, от перегрузок - тепловые реле КК1 и КК2.
Шаг 2.2. Дополнить технологическую схему процесса исполнительными и командными элементами.
ПРАВИЛО 6. Катушки магнитных пускателей на схеме обозначаются буквами, проставленными над стрелкой соответствующего направления вращения (перемещения) электропривода.
Примечание 2. Командные элементы изображаются графически как принято на функциональных схемах по ГОСТу и буквами таким образом, чтобы их месторасположение соответствовало логике срабатывания. При этом необходимо показать взаимодействие командного элемента с механизмами или средой.
Технологическая схема со схемными элементами показана на рис. 2.
Шаг 2.3. Выявить исходное состояние контактов командных элементов.
ПРАВИЛО 7. Если командный элемент воспринимает воздействие механизма, оператора или среды (значение параметра равно или выше заданного уровня), то его замыкающий контакт будет замкнут, а размыкающий разомкнут.
Исходное состояние командных элементов схемы управления зависит от состояния взаимодействия с механизмами, потоками продуктов.
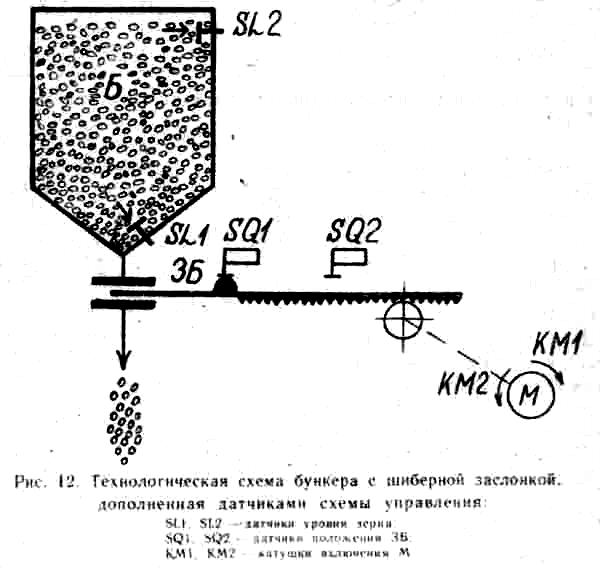
Рис.
2. Технологическая
схема бункера с шиберной заслонкой,
дополненная
датчиками схемы управления:
SL1,
SL2
– датчики уровня зерна;
SQ1,
SQ2
–датчики положения ЗБ;
КМ1,
КМ2 – катушки включения М
В нашем случае только SL1, SL2, SQ1 в исходном состоянии взаимодействуют с элементами установки. У этих элементов замыка-ющие контакты (З) будут замкнуты (обозначим знаком « + », а размыкающие (Р) — разомкнуты (« — »). При рассмотрение примера выбран вариант с полным бункером, поскольку именно это состояние позволяет осуществить все режимы работы установки.
Шаг 2.4. Составить символическую запись алгоритмов управления рабочим циклом установки для каждого технологического режима работы установки и каждого режима работы схемы.
ПРАВИЛО 8. Запись алгоритма управления получается заменой символов механизмов в записи режима управления технологическим процессом на символы соответствующих элементов схем управления с учетом исходного состояния контактов.
1. Ручной режим управления Р для всех технологических режимов работы установки одинаков. Поэтому на основе символической записи (1) можно записать:

В данном режиме наличие зерна в Б (при Λ в Б), а также завершение процессов открытия и закрытия ЗБ оператор определяет визуально.
2. Режим ПА (для всех технологических режимов)
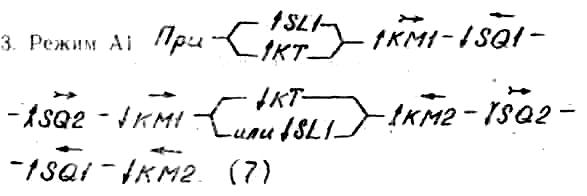


4. Режим А2
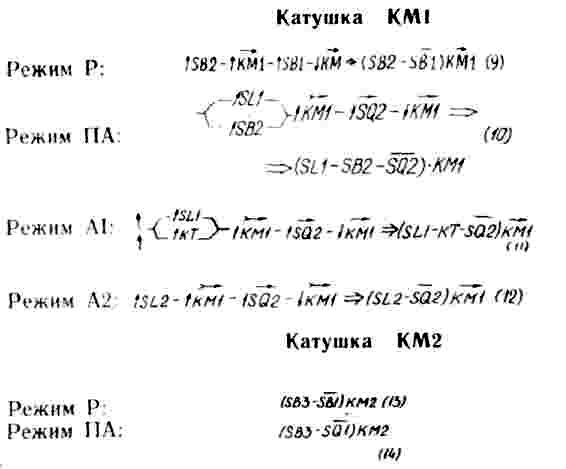
Шаг 2.5. Составить символические записи необходимых условий функционирования элементарных цепей управления катушками исполнительных и промежуточных (командных) элементов для каждого режима управления.
ПРАВИЛО 9. Из записи алгоритма управления выделить символ катушки (для которой составляется запись) и предшествующий символ, вынести символ катушки за скобки, опустить символ операции. Если направление символа операции элемента не совпадает с направлением символа операции катушки, следующего за ним, то над буквенным символом элемента ставится черта, что соответствует использованию размыкающего контакта.
Примечание 3. По отношению к катушке элементарные цепи различных режимов управления являются параллельными, а все элементы одной цепочки — последовательными.
 ПРАВИЛО
10. Если катушка срабатывает несколько
раз в течение рабочего цикла
установки, то символ катушки вынести
за квадратные скобки, а между круглыми
(одно включение) поставить знак « +
».
ПРАВИЛО
10. Если катушка срабатывает несколько
раз в течение рабочего цикла
установки, то символ катушки вынести
за квадратные скобки, а между круглыми
(одно включение) поставить знак « +
».

Шаг 2.6. Сформулировать достаточные условия работы элементарных цепей управления для каждого режима при условии: