

2.2.Кинематические цепи.
Кинематической цепью называется система звеньев, связанных между собой КП.
Кинематические цепи бывают:
1)плоские и пространственные
2)простые и сложные
3)замкнутые и разомкнутые
Простая кинематическая цепь-такая цепь, у которой каждое звено входит не более чем в две КП.
Сложная кинематическая цепь, в которой имеется хотя бы одно звено, входящее более чем в две КП.
Замкнутая КЦ - КЦ, звенья которой образуют один или несколько замкнутых контуров, ответвления заканчиваются стойкой.
Незамкнутая КЦ - КЦ, звенья которой не образуют замкнутых контуров.
2.3. Звено, название звена.
Схематическое изображение звена, входящего в две вращательные КП.
Схематическое изображение звена, входящего в три вращательные пары.
Базисное звено
В зависимости от характера совершаемого движения звенья имеют название.
Стойка – звено, принятое за неподвижное.
Кривошип – звено, которое вращается вокруг неподвижной оси, делая полной оборот.
Коромысло – звено, которое вращается вокруг неподвижной оси, делая неполный оборот.
Шатун – звено, которое не соединено со стойкой и совершает сложное плоское движение.
Ползун – звено, которое совершает движение по прямолинейной направляющей.
Кулиса – звено, которое образует вращательную или поступательную пару со стойкой и одновременно поступательную пару со звеном, подвижно соединенным с кривошипом.
Плоская, сложная, разомкнутая КЦ.

2.4. Кинематические схемы механизмов.
Механизм – это кинематическая цепь, имеющая стойку, в которой движение одного или нескольких звеньев, законы движения которых заданы, преобразуются во вполне определенное движение остальных звеньев.
П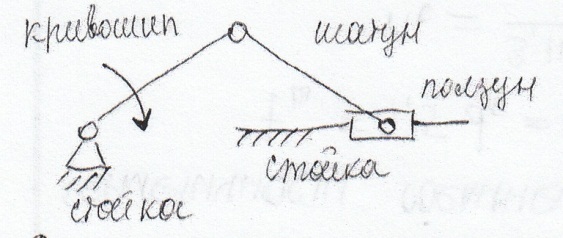 оршневой
двигатель
оршневой
двигатель
Различают механизмы:
- рычажные;
- зубчатые;
- червячные;
- фрикционные;
- винтовые;
- кулачковые, а также механизмы с гибкими звеньями.
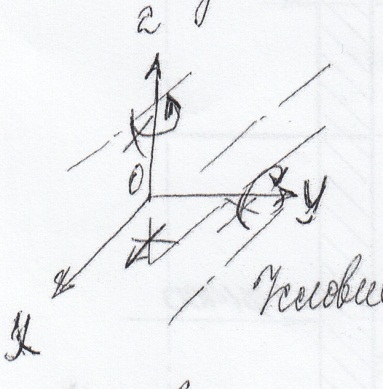
Плоский механизм – это такой механизм, все звенья которого движутся или в одной плоскости или в параллельных плоскостях (общее дополнительное условие – параллельность осей всех КП.).
 Это
накладывает три общих дополнительных
условия связи (три общих ограничения).
Это
накладывает три общих дополнительных
условия связи (три общих ограничения).
Например, оси || Ox , звенья движутся в плоскости || zOy.
Условие связи
В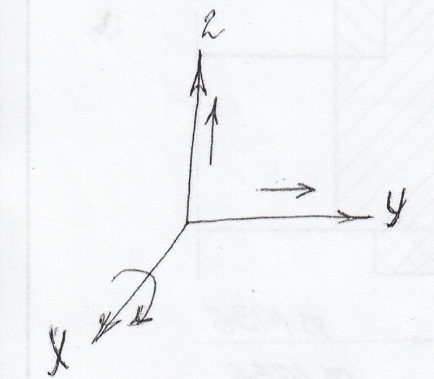 озможные
движения.
озможные
движения.
Рычажный механизм – это такой механизм, в котором существуют только КП 5 класа.
Плоский механизм – механизм, в котором общее дополнительное условие – параллельность осей всех кинематических пар.
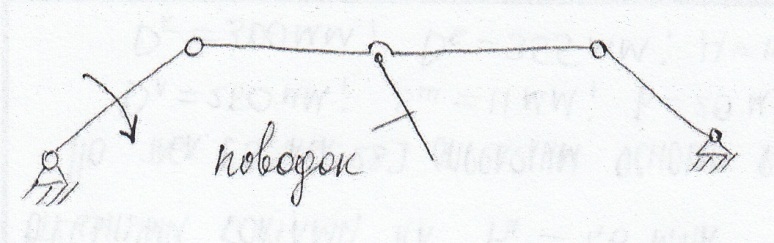
Кинематическая схема механизма (кинематическая модель механизма)- это схема, выполненная в масштабе с соблюдением тех размеров и форм, при изменении которых изменяется положение, скорость и ускорение точек механизма.
Для сложных механизмов составляется условная структурная схема механизма, на которой:
В

 се
поступательные пары заменяются
вращательными;
се
поступательные пары заменяются
вращательными;Звено, входящее в три КП изображается в четыре КП:
Е учитывается длина звеньев;
Двойные шарниры изображаются в виде двух концентрических окружностей.
Входное звено механизма – звено, которому сообщается движение, преобразуемое механизмом в требуемое движение других звеньев.
Выходное звено- звено, совершающее движение для выполнения которого и предназначен механизм.
При кинематическом анализе механизма кинематические параметры одного или нескольких звеньев необходимо знать или задать. Чаще в качестве начального звена принимают входное. Число их, в плоском механизме с парами пятого класса, должно быть равно числу степеней свободы механизма W. Применяют термины начальное звено (кинематические параметры известны или заданы), чаще входное.
В некоторых случаях применяют термин ведущее (движущее) звено- звено, если приложенные к нему внешние силы совершают положительную элементарную работу.
Ведомое звено – звено, если приложенные к нему внешние силы совершают отрицательную или равную нулю работу.
В большинстве случаев входное звено является и ведущим, но могут быть случаи инверсии
[латин. Перестановка], когда входное звено становится ведомым.