Примеры управления пкп Инициализация пкп – master
MOV AL,11h ; ICW1: запуск по фронту (LTIM=0),
OUT ___,AL ;каскадное включение (SNLG=0)
;ICW4 присутствует (IC4=1), D4=1 – признак ICW1
JMP $+2 ; временная задержка
MOV AL,__h ; ICW2: номера векторов прерываний –
OUT ___,AL ; в диапазоне 08h-0Fh.
JMP $+2
MOV AL,___ ; ICW3: SLAVE подключен к IR2
OUT ___,AL
JMP $+2
MOV AL,01h ; ICW4: режим работы системы x86
OUT 21h,AL
JMP $+2
MOV AL, 00h
OUT ___,AL ; сброс регистра масок
Инициализация пкп – slave
MOV AL,15h ; ICW1: запуск по уровню (LTIM=1),
OUT ___,AL ;каскадное включение (SNLG=0)
;ICW4 присутствует (IC4=1), D4=1 – признак ICW1
JMP $+2 ; временная задержка
MOV AL,___ ; ICW2: номера векторов прерываний –
OUT ___,AL ; в диапазоне 70h-78h.
JMP $+2
MOV AL,___ ; ICW3: подключен к IR2 MASTER
OUT ___,AL
JMP $+2
MOV AL,01h ; ICW4: режим работы системы x86
OUT A1h,AL
JMP $+2
MOV AL, 00h
OUT ___,AL ; сброс регистра масок
Управление масками запросов
IN AL,21h ;чтение IMR
OR AL,___ ;запрет прерываний от клавиатуры
OUT 21h,AL ;запись IMR
. . .
IN AL,21h ;чтение IMR
AND AL,_____ ;разрешение прерываний от клавиатуры
OUT 21h,AL ;запись IMR
Завершение сервисной процедуры
MOV AL, 20h ;запись в AL кода команды EOI
OUT ____, AL ;выдача команды EOI в ведомый i8259A
OUT ____, AL ;выдача команды EOI в ведущий i8259A
IRET ;возврат в прерванную программу
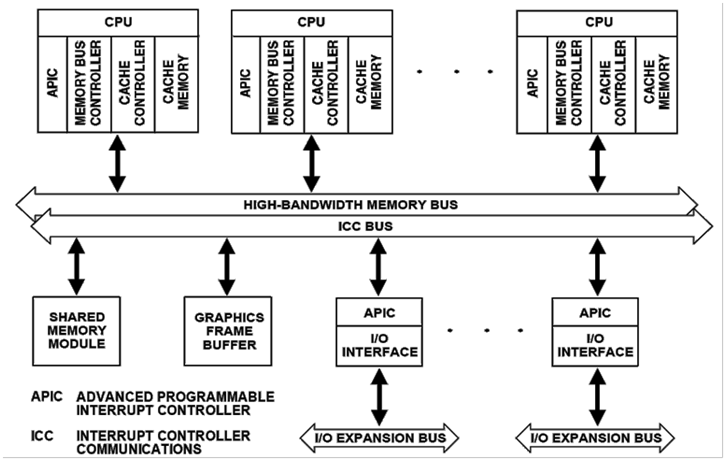
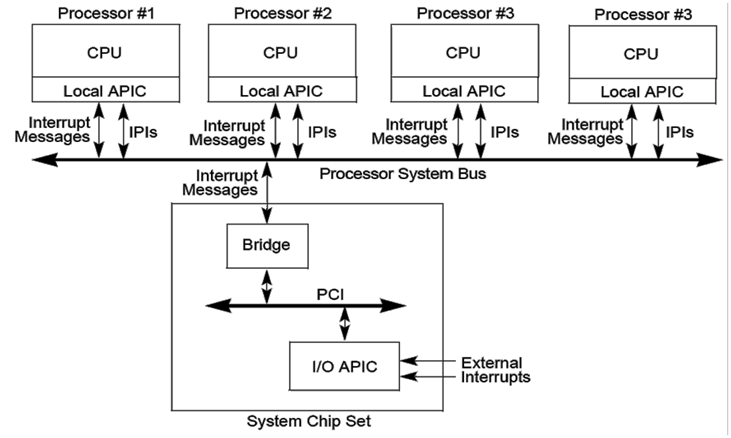
Усовершенствованный контроллер прерываний apic
APIC – Advanced Programmable Interrupt Controller.
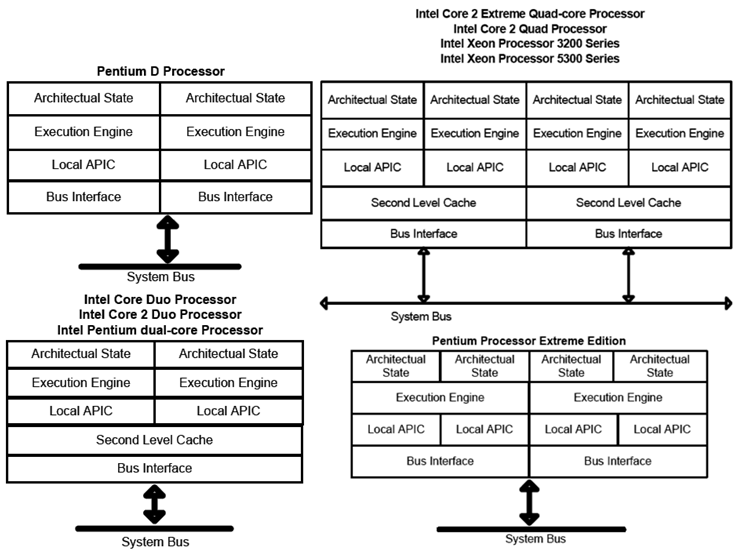
В многопроцессорной системе реализуется на основе ______________________________________. Включает два базовых функциональных модуля:
локальный (______________);
системный (_/________).
Модули APIC:
функционируют ______________________;
взаимодействуют _____________________:
специальной последовательной (Interrupt Controller Communications bus, ICC);
cистемной* (Front-Side bus).
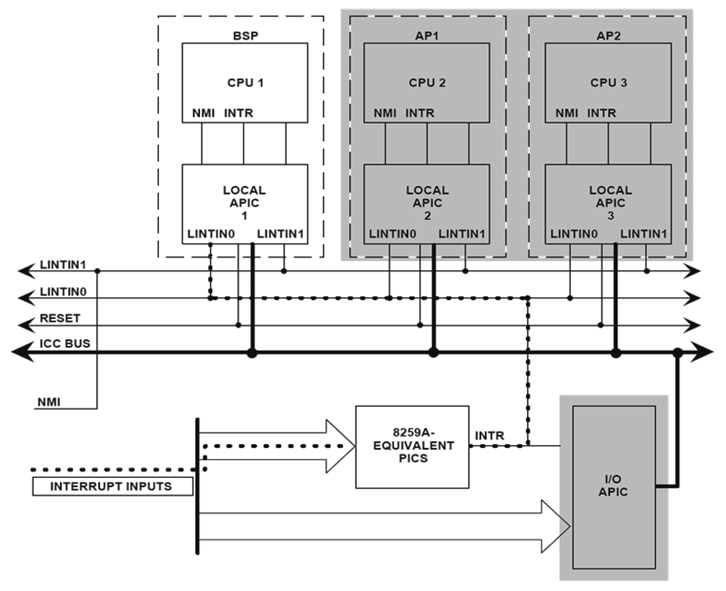
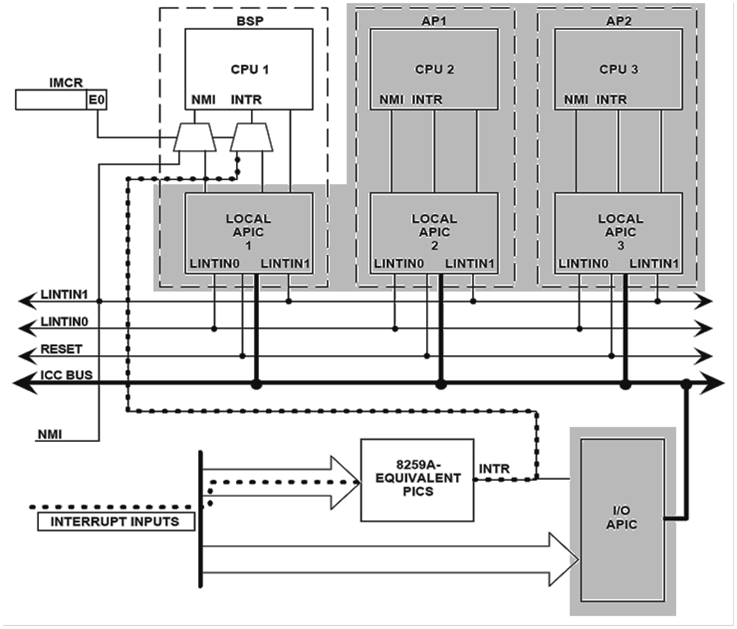
Взаимодействие локальных и системных модулей apic
BSP (bootstrap processor) – главный процессор;
AP (application processor) – вспомогательный процессор
Назначение локального модуля apic
прием запросов на прерывание от:
______________________ микропроцессора;
_______________________________;
______________________ (или внешнего контроллера прерываний);
передача принятых запросов на обработку в ядро микропроцессора.
В многопроцессорных системах:
прием от других процессоров и передача им _______________________________________________________ (interprocessor interrupt, IPI). IPI-сообщения передаются по ____________________ или ___________.
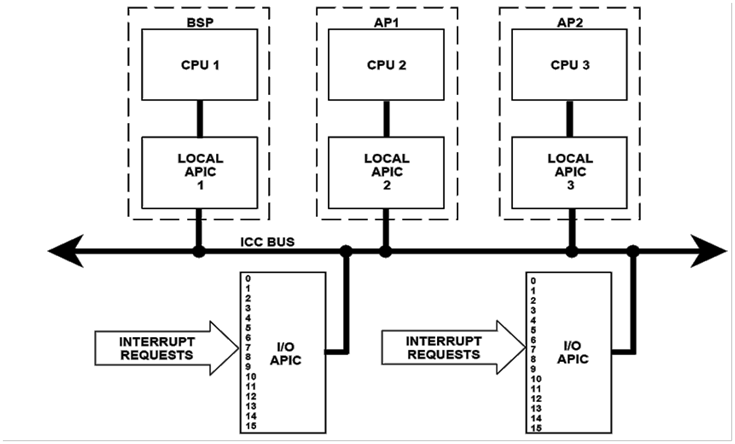
Назначение системного модуля APIC
прием внешних запросов на прерывание от _____________________________;
передача запросов в виде сообщений о прерываниях _______________________________.
Является частью системной логики.
В многопроцессорных системах:
распределение внешних прерываний между ___________________________________ процессоров, подключенных к системной шине или шине ICC.
Варианты взаимодействия модулей APIC
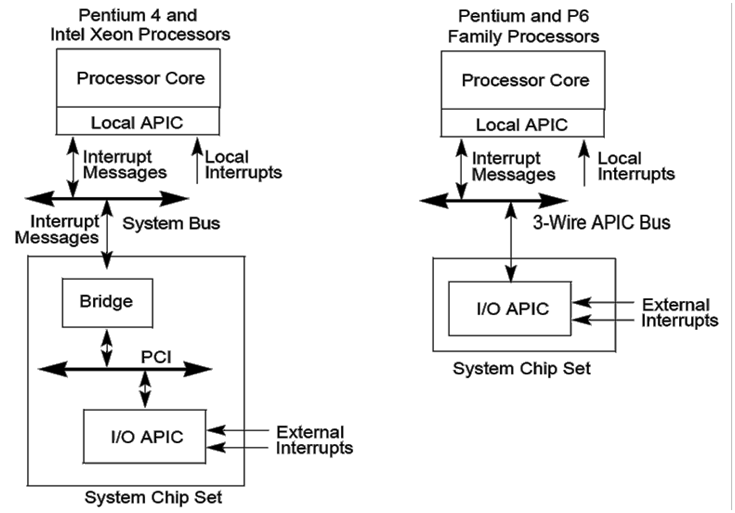
Подключение системного модуля APIC без использования локальных запросов
Режимы подсистемы аппаратных прерываний
PIC Mode. Модули APIC _______________________. Система работает без _______________________________.
Virtual Wire Mode. Модуль APIC используется в качестве ___________________________________. В остальном режим подобен PIC Mode.
Symmetric I/O Mode. ____________________________________________________________ за счет использования всех возможностей APIC.
«PIC Mode»
«Virtual Wire Mode» без I/O APIC