

Потери напора на местных гидравлических сопротивлениях
Местными гидравлическими сопротивлениями называются любые участки гидравлической системы, где имеются повороты, преграды на пути потока рабочей жидкости, расширения или сужения, вызывающие внезапное изменение формы потока, скорости или направления ее движения. В этих местах интенсивно теряется напор. Примерами местных сопротивлений могут быть искривления оси трубопровода, изменения проходных сечений любых гидравлических аппаратов, стыки трубопроводов и т.п.
Потери
напора по длине,
иначе их называют потерями напора на
трение
![]() ,
в чистом виде, т.е. так, что нет никаких
других потерь, возникают в гладких
прямых трубах с постоянным сечением
при равномерном течении. Такие потери
обусловлены внутренним трением в
жидкости и поэтому происходят и в
шероховатых трубах, и в гладких. Величина
этих потерь выражается зависимостью
,
в чистом виде, т.е. так, что нет никаких
других потерь, возникают в гладких
прямых трубах с постоянным сечением
при равномерном течении. Такие потери
обусловлены внутренним трением в
жидкости и поэтому происходят и в
шероховатых трубах, и в гладких. Величина
этих потерь выражается зависимостью
![]() ,
,
При равномерном движении жидкости на участке трубопровода постоянного диаметра d длиной l этот коэффициент сопротивления прямо пропорционален длине и обратно пропорционален диаметру трубы
![]() ,
,
Потери напора на трение в турбулентном потоке жидкости. При исследовании вопроса об определении коэффициента потерь напора на трение в гидравлически гладких трубах можно прийти к мнению, что этот коэффициент целиком зависит от числа Рей-нольдса. Известны эмпирические формулы для определения коэффициента трения, наиболее широкое распространение получила формула Блазиуса:
![]()
Билет №3 2 вопрос
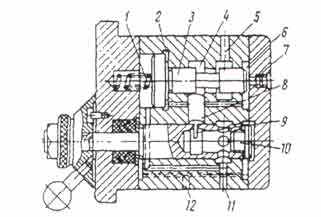
ПНЕВМОКЛАПАНЫ ВЫДЕРЖКИ ВРЕМЕНИ
Пневмоклапаны выдержки времени предназначены для изменения направления нли пуска и останова потока сжатого воздуха через заданный промежуток времени после подачи управляющего сигнала. Современные конструкции таких пневмоклапанов содержат инерционное звено, состоящее из пневмоемкости и пневмодросселя, пневмоклапан последовательности и пневмораспределитель, встроенные в корпус. Имеются конструкции, в которых пневмоклапан последовательности или распределитель отсутствует.
Инерционное звено позволяет регулировать темп изменения давления путем настройки проходного сечения дросселя или объема пневмоемкости. Пневмоклапан последовательности по достижении задаиного уровня давления в емкости формирует дискрегный пневматический сигнал, который используется для перек.тючения распределителя или как выходной сигнал устройства.

Пневматический входной сигнал подастся к отверстию У, расположенному в плите 1, поступает в полость 6 и проходит по каналу Г к мембране 9. Под давлением сжатого воздуха мембрана 9 прижимается к седлу корпуса 8 и закрывает выход в атмосферу. Одновременно сжатый воздух через металлокерамический фильтр 4 и дроссель 7 поступает в надпоршневую полость в. В начальный момент давление под поршнем 6 превышает давление над ним вследствие потери давления на дросселе 7. При увеличении давления в полости в над поршнем до определенного значения поршень 6 начинает движение вниз. Как только клапан 12 отрывается от седла 11, подпоршневая полость сообщается с атмосферой, давление в ней резко падает, что обеспечивает быстрое перемещение поршня вниз. При этом связанный с поршнем 6 толкатель 10 закрывает выхлопной канал (центральное отверстие внутри толкателя 10) и перемещает клапан 2, открыв проход сжатому воздуху из отверстия П к отверстию 0.Время от подачи входного сигнала до момента появления выходного сигнала является временем выдержки, которое определяется настройкой дросселя и объемом дополнительной емкости, подсоединяемой к отверстию D .В нижнем положении вкладыш 5 отсекает подпоршневую полость от атмосферы, упираясь в седло 11. В этом положении пневмоклапан выдержки остается до момента снятия входного сигнала. При снятии входного сигнала мембрана 9 отжимается от седла корпуса и сообщает надпоршневую полость с атмосферой через отверстие А 1 . Под действием пружины 13 и остаточного давления в подпоршневой полости поршень 6 возвращается в исходное положение. Пружина 14 и давление возвращают клапан 2 в первоначальное положение и прижимают его к седлу 5. При этом отверстие 0 разобщается с отверстием П и сообщается с отверстием А.
http://www.pneumoprivod.ru/pbl-time-delay-valve.htm
Билет №4 1 вопрос
Скорость потока жидкости в трубах различается вдоль поперечного сечения трубы. Распределение скорости потока зависит от того, является поток ламинарным или турбулентным. При небольших скоростях поток является ламинарным, при больших скоростях он становится турбулентным.
В ламинарном потоке скорость около стенки трубы близка к нулю, тогда как в середине трубы она относительно высока. При турбулентном потоке скорость более равномерна по всему поперечному сечению, но все равно уменьшается возле стенки трубы. На стенке трубы происходят потери на трение.
Билет №4 2 вопрос
Регуляторы потока применяются в гидросистемах для обеспечения равномерной скорости движения независимо от внешней нагрузки, а также для регулирования величины этой скорости.
В отличие от обычных дросселей они содержат специальный регулятор давления, обеспечивающий постоянный перепад давления и соответственно этому постоянный расход рабочей жидкости. Регуляторы потока часто называют дросселями с регулятором.
На рис. 4 приведена конструкция типового регулятора потока.
Рис.4. Регуляторы потока (дроссель с регулятором):
|
1 - пружина; 2, 4, 6 - полости; 3 - клапан; 5 - каналы для подвода рабочей жидкости; 7 - канал для присоединения манометра; 8 - проточка; 9 - щель; 10 - дроссель; 11 - канал для отвода рабочей жидкости; 12 - канал для отвода утечек (дренаж) |
Дозировка расхода рабочей жидкости устанавливается дросселем 10, а постоянство перепада давления в дросселе обеспечивается клапаном 3. Рабочая жидкость через отверстие 5 поступает в полость 4 клапана 3 и далее через проточку 8 и щель 9 в дросселе 10 отводится в отверстие для отвода рабочей жидкости 11. Клапан 3 находится под действием усилия пружины 1 и противодействующего ему давления рабочей жидкости, подводимой к полостям 2 и 6 из полости 4.
Усилие предварительного сжатия пружины 1 выбрано таким, что торец клапана 3 дросселируя поступающую жидкость, обеспечивает постоянную разность давления рабочей жидкости до регулятора и после него, равную 0,30 - 0,35 МПа независимо от изменения давления в гидросистеме. Отвод утечек производится через отверстие 12. Отверстие7 служит для присоединения манометра.
Регуляторы потока часто совмещают с предохранительным клапаном. Такие устройства помимо обеспечения равномерной скорости движения гидродвигателей и регулирования величины этой скорости предохраняют гидросистему от перегрузки и позволяют дистанционно разгружать насос и гидросистему от избыточного давления. Отличительной особенностью регуляторов потока с предохранительным клапаном является автоматическое регулирование давления в гидросистеме в соответствии с изменением внешней нагрузки на рабочие органы.
Стабилизация скорости движения силового органа обеспечивается постоянством перепада давления в регуляторе потока независимо от изменения внешней нагрузки. Это достигается тем, что переливной клапан регулятора, находящийся под действием давления насоса, с одной стороны, и под действием пружины и давления в рабочей полости гидроцилиндра с другой, при изменении давления на выходе регулятора автоматически изменяет давление насоса, направляя избыток рабочей жидкости в гидробак. Максимальное давление в напорной гидролинии определяется усилием настройки пружины шарикового клапана.
Существуют также регуляторы потока с обратным клапаном. Они предназначены для регулирования и поддержания установленной скорости перемещения рабочих органов самоходных машин независимо от нагрузки на рабочие органы в одном направлении и свободного пропуска потока рабочей жидкости в другом направлении.
Билет №5 1 вопрос
Под
коэффициентом расхода понимается
произведение коэффициента скорости,
учитывающего потери на трение, и
коэффициента сжатия струи. Экспериментальные
исследования показывают, что на
коэффициент расхода оказывает влияние
форма очертания выходного отверстия,
теплообмен, а также наблюдается
зависимость от числа Re
и числа Маха М. Коэффициент расхода
 (величина его всегда меньше единицы)
учитывает отклонение действительного
процесса течения от адиабатического
вследствие выделения тепла при трении,
а также ряда других неучтенных факторов.
Точное его значение может быть найдено
только с учетом экспериментальных
данных, хотя существует для его
определения и ряд теоретических
зависимостей, полученных из упрощенных
(приближенных) выражений для расхода.
Одно из таких выражений имеет вид
(величина его всегда меньше единицы)
учитывает отклонение действительного
процесса течения от адиабатического
вследствие выделения тепла при трении,
а также ряда других неучтенных факторов.
Точное его значение может быть найдено
только с учетом экспериментальных
данных, хотя существует для его
определения и ряд теоретических
зависимостей, полученных из упрощенных
(приближенных) выражений для расхода.
Одно из таких выражений имеет вид
 .
.
При
 .
.
Билет №5 2 вопрос
Билет №6 1 вопрос
Гидроприводом называется совокупность гидромашин, гидроаппаратуры, гидролиний (трубопроводов) и вспомогательных устройств, предназначенных для передачи энергии и преобразования движения посредством жидкости. Гидропривод, содержащий объемные гидромашины, называется объемным.
Пневмопривод представляет собой систему взаимосвязанных пневмо-
устройств, предназначенных для приведения в движение рабочих органов ма-
шин или рабочих звеньев механизмов.
К основным преимуществам пневмоприводов по сравнению с гидропри-
водами относятся:
- большие допускаемые скорости потоков сжатого воздуха;
- относительно небольшие потери в пневмосети;
- сжатый воздух не образует горючих и взрывоопасных смесей;
- сжатый воздух незагрязняет окружающую среду
Основные
элементы объемного гидропривода
Основными
элементами объемного гидропривода
являются:
1 Гидромашины –
насосы и гидродвигатели. Насосы служат
для подачи (перемещения)
жидкости, гидродвигатели –
для преобразования энергии подаваемой
жидкости в механическую энергию рабочего
органа.
2 Гидроаппаратура –
это устройства управления гидроприводом,
при помощи которых он регулируется, а
также средства защиты от чрезмерно
высоких давлений жидкости (дроссели,
клапаны разного назначения и
гидрораспределители).
3 ^ Вспомогательные
устройства:
фильтры, теплообменники, (нагреватели
и охладители жидкости), гидробаки и
гидроаккумуляторы.
4 Гидролинии (трубопроводы):
всасывающие, напорные, сливные,
дренажные.
5 ^ Контрольно-измерительные
приборы:
манометры, расходомеры, термометры и
др.
Каждый
объемный гидропривод содержит источник
энергии. По виду источника энергии
гидроприводы разделяют на три
типа:
а) насосный
гидропривод –
гидропривод, в котором рабочая жидкость
подается в гидродвигатель объемным
насосом, входящим в состав этого
гидропривода;
б) аккумуляторный
гидропривод –
рабочая жидкость подается в гидродвигатель
от предварительно заряженного
гидроаккумулятора;
в) магистральный
гидропривод -
в котором рабочая жидкость поступает
в гидродвигатель из гидромагистрали.
По
характеру движения выходного звена
различают объемные гидроприводы:
а) поступательного
движения –
с поступательным движением выходного
звена гидродвигателя;
б) поворотного
движения –
с поворотным движением выходного звена
гидродвигателя на угол
меньше ![]() ;
в) вращательного
движения –
с вращательным движением выходного
звена гидродвигателя.
Гидропривод,
в котором скорость выходного звена
гидродвигателя может изменяться по
заданному закону, называется регулируемым.
В случае отсутствия устройств для
изменения скорости –нерегулируемым.
;
в) вращательного
движения –
с вращательным движением выходного
звена гидродвигателя.
Гидропривод,
в котором скорость выходного звена
гидродвигателя может изменяться по
заданному закону, называется регулируемым.
В случае отсутствия устройств для
изменения скорости –нерегулируемым.
Билет №6 2 вопрос
Контроллеры предназначены для построения высокоэффек
тивных, доступных по цене и надежных систем автоматиза
ции различных технологических объектов широкого класса
– простых, средних и сложных, медленных и быстрых, со
средоточенных и рассредоточенных в пространстве. Этим
обеспечивается единая технология проектирования систем
разной сложности и однородность аппаратуры автоматики
на предприятии, существенно уменьшающая затраты на
проектирование, комплект ЗИП, обучение персонала и т.п.
Контроллеры рекомендуются для применения инжинирин
говым и проектным организациям, предприятиям с большим
количеством разнотипных технологических объектов.
Функции контроллеров
Контроллеры предназначены для решения следующих типо
вых задач автоматизации:
• сбор, контроль, регистрация и архивация информации с
датчиков различных типов;
• защита технологического оборудования;
• логическое, программнологическое управление техно
логическими агрегатами, автоматический пуск и останов
технологического оборудования;
• всережимное регулирование прямых и косвенных парамет
ров по различным законам;
• расчет техникоэкономических показателей технологичес
кого процесса;
• математическая обработка информации по различным
алгоритмам;
• обмен данными с другими контроллерами в рамках конт
роллерной управляющей сети реального времени;
• обслуживание технологаоператора дистанционно (станция
оператора на базе компьютера и SCADAсистемы) и/или по
месту (панель оператора на шкафе управления);
• обслуживание технического персонала при наладке,
программировании, ремонте, проверке технического состоя
ния контроллера дистанционно (инженерная станция на базе4 ОБЩИЕ СВЕДЕНИЯ О КОНТРОЛЛЕРАХ
АБС ЗЭиМ Автоматизация
компьютера и IDEсистемы) и/или по месту (портативный
пульт настройки);
• самоконтроль и диагностика всех устройств контроллера в
непрерывном и периодическом режимах, вывод информа
ции о техническом состоянии контроллера обслуживающему
персоналу.
Билет №7 1 вопрос
Обратным гидроклапаном называется направляющий гидроаппарат, предназначенный для пропускания рабочей жидкости только в одном направлении. Они могут иметь различные запорно-регулирующие элементы: шариковый, конусный, тарельчатый или плунжерный.
В соответствии со своим назначением обратный клапан должен быть герметичным в закрытом положении, т.е. в исходном положении запорно-регулирующего элемента. Для достижения абсолютной герметичности в закрытом положении применяют обратные клапаны с двумя или тремя последовательно соединенными запорно-регулирующими элементами.
Пружина обратных клапанов нерегулируемая, ее сила натяжения должна обеспечивать лишь преодоление сил трения и инерцию, а также быстрое возвращение в исходное положение запорно-регулирующего элемента.
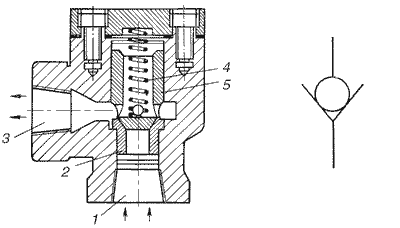
Рис.6.6. Обратный клапан типа Г51: а - конструкция; б - условное обозначение
Обратный клапан Г51 (рис.6.6) имеет конусный запорно-регулирующий элемент 5. При подводе рабочей жидкости к отверстию 1 запорно-регулирующий элемент 5 поднимается над седлом 2, преодолевая силу натяжения пружины 4. Жидкость свободно проходит к отверстию 3. При изменении направления потока рабочей жидкости запорно- регулирующий элемент 5 прижат к седлу и блокирует отверстие 1
Логические элементы
Различают комбинационные схемы и цифровые автоматы. В комбинационных схемах состояние на выходе в данный момент времени однозначно определяется состояниями на входах в тот же момент времени. Комбинационными схемами, например, являются логические элементы И, ИЛИ, НЕ и их комбинации. В цифровом автомате состояние на выходе определяется не только состояниями на входах в данный момент времени, но и предыдущим состоянием системы. К цифровым автоматам относятся триггеры.
Логическими элементами называются элементы, выполняющие логические операции И, ИЛИ, НЕ и комбинации этих операций. Указанные логические операции можно реализовать с помощью контактно-релейных схем и с помощью электронных схем. В настоящее время в подавляющем большинстве применяется электронные логические элементы, причем электронные логические элементы входят в состав микросхем. Имея в распоряжении логические элементы И, ИЛИ, НЕ, можно сконструировать цифровое электронное устройство любой сложности. Электронная часть любого компьютера состоит из логических элементов.
Система простых логических функций, на основе которой можно получить любую логическую функцию, называется функционально полной.

.
Билет №7 2 вопрос
Билет №8 1 вопрос
Изменение величины расхода жидкости осуществляется аппаратами, называемыми дросселями (дроссель - регулируемое гидравлическое сопротивление). Дроссель представляет собой аппарат, имеющий возможность изменять площадь проходного отверстия, по которому проходит поток жидкости. На рис.2.95 показана конструкция щелевого дросселя модели Г77. В корпусе 3 установлен поворотный полый плунжер 4 с лимбом 1 и крышки 2 и 5. Рабочая жидкость подводится к аппарату по каналу А. Далее она попадает внутрь плунжера 4 и проходит через прорезь В в выходной канал Б. Щель дросселя представляет собой проходное отверстие, образованное кромками прорези В и отверстия Г

Рис. 2.95. Гидравлический дроссель щелевого типа: а – устройство; б – условное обозначение
Регулятор расхода (рис.2.99) представляет собой аппарат, в корпусе которого установлен дроссель, с помощью которого настраивается необходимая величина расхода, и клапан постоянной разницы давлений (иначе - регулятор давления), обеспечивающий поддержание расхода постоянным. Регулятор давления может быть установлен последовательно с дросселем (как это показано на рис.2.99à) и параллельно с ним (рис.2.99в).
Работают аппараты следующим образом. Жидкость поступает в аппарат (рис.2.99а) по каналу А, проходит зазор h между кромками грибкового плунжера 2 и расточки в корпусе 1 и подходит к щели дросселя 5, а по отверстию а - к нижним торцам грибкового плунжера 2. При этом перед дросселем начинает расти давление, которое воздействует на нижние торцы плунжера 2 и приподнимает его вверх, уменьшая зазор h. Благодаря возникшему давлению P1 на входе в дроссель жидкость преодолевает его сопротивление и идет внутри плунжера 5 на выход Б. При наличии нагрузки на выходе аппарата (например, жидкость направляется в гидравлический двигатель) в канале Б поднимется давление P2, соответствующее нагрузке, которое вместе с пружиной 3 будет противодействовать подъему плунжера 2 (канал Б соединен с полостью В отверстием в). Когда на плунжере 2 наступит равенство сил, действующих на него сверху (пружина и давление P2) и снизу (давление P1), он остановится; при этом на дросселе установится определенная разность давлений ΔP = P1 — P2. Если же по каким-либо причинам (например, колебание сил нагрузки) давление P 2 возрастет, то нарушится равновесие сил на плунжере, и он начнет опускаться вниз, увеличивая зазор h и уменьшая сопротивление прохода жидкости к дросселю. Потери давления на нем станут меньше, что приведет к росту давления P1 и, соответственно, силы снизу на плунжер 2, препятствующий его опусканию. Рост давления P1 и опускание плунжера будут продолжаться до наступления равновесия сил. При этом величина разности давлений ΔP = P1 — P2 восстановится, обеспечивая пропускание через дроссель настроенного расхода. Если же давление P2 по каким-либо причинам уменьшится, то подъем плунжера 2 уменьшит зазор h, увеличит потери давления при прохождении этого зазора и уменьшит давление P 1 до такой величины, при котором разность давлений снова станет прежней.

Рис.2.99. Регуляторы расхода: а–устройство регулятора расхода модели Г55-2; б- его условное обозначение; в - устройство регулятора расхода модели Г55-1; г - его условное обозначение
Билет №8 2 вопрос
Билет №9 1 вопрос
Г идравлическая
аппаратура для регулирования давления
а)
Основным универсальным аппаратом для
регулирования давления является гидравлический
клапан давления.
Он является аппаратом прямого действия,
т.е. в нем отсутствуют вспомогательные
запорно-регулирующие элементы, а
подводимый поток рабочей жидкости
воздействует на основной золотник. В
гидроприводе клапан давления может
выполнять следующие функции:
1.
в
качестве предохранительного клапана
(рис.7.1.). В этом случае он останавливается
в напорной магистрали насоса параллельно
насосу. С его помощью настраивается
предельное давление в напорной
магистрали. В параллельном положении
клапан давления открывается только в
случае превышения давления выше
установленного.
идравлическая
аппаратура для регулирования давления
а)
Основным универсальным аппаратом для
регулирования давления является гидравлический
клапан давления.
Он является аппаратом прямого действия,
т.е. в нем отсутствуют вспомогательные
запорно-регулирующие элементы, а
подводимый поток рабочей жидкости
воздействует на основной золотник. В
гидроприводе клапан давления может
выполнять следующие функции:
1.
в
качестве предохранительного клапана
(рис.7.1.). В этом случае он останавливается
в напорной магистрали насоса параллельно
насосу. С его помощью настраивается
предельное давление в напорной
магистрали. В параллельном положении
клапан давления открывается только в
случае превышения давления выше
установленного.
в качестве переливного клапана. На гидравлических схемах обозначается аналогично предохранительному клапану. Переливной клапан используется в схемах с дроссельным регулированием скорости. Он обеспечивает пропускание части расхода рабочей жидкости, подаваемой насосом на слив в бак. В нормальном положении переливной клапан закрыт.
^ В качестве клапана последовательности. На схемах обозначается аналогично предохранительному клапану.
в качестве клапана сравнения.
б)
Клапан предохранительный прямого и
непрямого действия.
 Если
в гидравлическом аппарате поток рабочей
жидкости воздействует на основной
запорно-регулирующий элемент, то такой
гидроаппарат называется аппаратом
прямого действия. Если же поток рабочей
жидкости воздействует на вспомогательный
золотник и только после его срабатывания
открывается основной запорно-регулирующий
элемент, то такой аппарат называется
аппаратом непрямого действия. У таких
гидравлических аппаратов более высокая
чувствительность и следовательно более
высокая точность настройки. Примером
может служить предохранительный клапан
непрямого действия. Его разновидностью
этого гидроаппарата является
предохранительный клапан с электромагнитной
разгрузкой (рис 7.2.). При включении
электромагнита двухлинейного
распределителя, встроенного в клапан,
рабочая жидкость п
Если
в гидравлическом аппарате поток рабочей
жидкости воздействует на основной
запорно-регулирующий элемент, то такой
гидроаппарат называется аппаратом
прямого действия. Если же поток рабочей
жидкости воздействует на вспомогательный
золотник и только после его срабатывания
открывается основной запорно-регулирующий
элемент, то такой аппарат называется
аппаратом непрямого действия. У таких
гидравлических аппаратов более высокая
чувствительность и следовательно более
высокая точность настройки. Примером
может служить предохранительный клапан
непрямого действия. Его разновидностью
этого гидроаппарата является
предохранительный клапан с электромагнитной
разгрузкой (рис 7.2.). При включении
электромагнита двухлинейного
распределителя, встроенного в клапан,
рабочая жидкость п одается
через клапан на слив в бак в независимости
от величины давления в напорной
магистрали. Устанавливаются оба аппарата
всегда параллельно насосу.
в)
Редукционный клапан.
Этот
аппарат предназначен для редуцирования
(уменьшения) подводимого к нему давления
и поддержания этого давления на
постоянном, заданном уровне. Редукционный
клапан может выполняться в двух
исполнениях: прямого и непрямого
действия ( рис.7.3.). Редукционный клапан
используется в гидроприводе в случае
когда от одного насоса питается несколько
гидродвигателей, и в одном из них рабочее
давление должно быть меньше. В отличие
от клапана давления редукционный клапан
является нормально открытым аппаратом
(стрелка всегда соединяет каналы подвода
и отвода). Редукционный клапан входит
в состав комплексного аппарата,
называемого регулятором расхода.
одается
через клапан на слив в бак в независимости
от величины давления в напорной
магистрали. Устанавливаются оба аппарата
всегда параллельно насосу.
в)
Редукционный клапан.
Этот
аппарат предназначен для редуцирования
(уменьшения) подводимого к нему давления
и поддержания этого давления на
постоянном, заданном уровне. Редукционный
клапан может выполняться в двух
исполнениях: прямого и непрямого
действия ( рис.7.3.). Редукционный клапан
используется в гидроприводе в случае
когда от одного насоса питается несколько
гидродвигателей, и в одном из них рабочее
давление должно быть меньше. В отличие
от клапана давления редукционный клапан
является нормально открытым аппаратом
(стрелка всегда соединяет каналы подвода
и отвода). Редукционный клапан входит
в состав комплексного аппарата,
называемого регулятором расхода.
Билет №9 2 вопрос
Каков уровень использования гидравлической пропорциональной техники в производстве мобильной техники в России? Производственные компании настороженно относятся к новым технологиям, и даже удачный опыт внедрения пропорциональных устройств не гарантирует, что оборудование на их базе пойдет в серию. Так, одни из наших клиентов остались очень довольны опытными моделями кранов с пропорциональными гидрораспределителями, но в итоге отказались от их серийного производства. Техника получилась дорогой, а значит, менее востребованной на российском рынке.
Применение электропропорциональной гидравлики требует определенной чистоты масла, это увеличивает эксплуатационные расходы, а использование электроники, чувствительной к температурным режимам, сужает географию продаж. Еще одна причина непопулярности пропорциональной гидравлики – недостаток специалистов, которые могут обслуживать подобное оборудование. Российских потребителей не очень волнует, удобна или неудобна техника с точки зрения эргономики. Важнее, чтобы она была дешевой, надежной и не требовала высокой квалификации обслуживающего персонала.
Статистикой использования пропорциональной гидравлики в России я не располагаю, могу лишь сказать, что компания "ГидраПак" реализовала за три года около четырех десятков проектов с использованием пропорционального гидрооборудования.
КМ: Какие основные задачи решаются с помощью пропорциональной гидравлики? Чаще всего приходится управлять расходом и давлением. Это необходимо, например, для регулировки скорости работы исполнительного механизма, когда оператору нужно изменять этот параметр. Реже пропорциональная техника применяется для изменения давления в системе, для этого используются редукционные и предохранительные клапаны или клапаны давления с пропорциональным управлением. Еще реже пропорциональная гидравлика востребована для одновременного изменения нескольких параметров. Такие задачи приходится решать, например, на испытательных стендах, когда требуется изменить и скорость, т. е. расход в системе, и давление.
 Если
говорить о конкретных примерах применения
электропропорциональной гидравлики,
то стоит назвать автогидроподъемники
с высотой подъема более 14–15 метров.
Такие машины требуют очень четкого
регулирования. Оператор находится на
большой высоте, и любые рывки и резкие
перемещения могут привести к падению
машины или к тому, что самочувствие
оператора ухудшится. Пропорциональная
гидравлика используется и в кранах, и
на испытательных стендах для
аэрокосмической отрасли. Достаточно
часто пропорциональные приводы
применяются в приводах ходовой части
мобильных колесных машин, в приводах
различных лебедок. Например, сейчас мы
делаем проект для лебедок трубоукладчиков.
Много проектов, связанных с мобильными
машинами, пожарными лестницами,
коммунальной техникой.
Если
говорить о конкретных примерах применения
электропропорциональной гидравлики,
то стоит назвать автогидроподъемники
с высотой подъема более 14–15 метров.
Такие машины требуют очень четкого
регулирования. Оператор находится на
большой высоте, и любые рывки и резкие
перемещения могут привести к падению
машины или к тому, что самочувствие
оператора ухудшится. Пропорциональная
гидравлика используется и в кранах, и
на испытательных стендах для
аэрокосмической отрасли. Достаточно
часто пропорциональные приводы
применяются в приводах ходовой части
мобильных колесных машин, в приводах
различных лебедок. Например, сейчас мы
делаем проект для лебедок трубоукладчиков.
Много проектов, связанных с мобильными
машинами, пожарными лестницами,
коммунальной техникой.
Билет №10 1 вопрос
Задача информационной подсистемы-оповещение оператора о величинах давления и расхода
рабочей среды
Состав подсистемы:
Приборы для измерения давления
Температурные датчики
Расходомеры
Клапаны выдержки времени
Датчики давления
Путевые и конечные выключатели
Регистрирующая аппаратура
Реле давления (подают сведения об уровне давления
Датчики давления (контролируют величину давления
Датчики температуры(выдают командный сигнал при достижении температуры природной среды заданной величины)
Расходомеры
Реле времени (клапан выдержки времени (изменяют направление потока рабочей среды)
Путевые и конечно переключатели (автоматически управляют движениями исполнительных механизмов)
Релейно-контактная цепь
Реле – устройство, в котором при плавном изменении входного сигнала осуществляется скачкообразное изменение выходного сигнала.
Релейно – контактная цепь (РКЦ) -совокупность соединенных между собой контактов, завершающихся катушкой реле.
Билет №10 2 вопрос
Использование клапанов давления с пропорциональным управлением позволяет при необходимости непрерывно регулировать давление в различных линиях гидросистемы посредством электрического сигнала. Принципы действия клапанов давления с пропорциональным управлением аналогичны принципам, заложенным в основу работы рассмотренных выше клапанов с ручной настройкой, с той разницей, что сжатие настроечных пружин в них осуществляется посредством пропорциональных магнитов, а не посредством вращения регулировочных винтов.
Билет 11.1

Билет 11.2
 Билет
12.1
Билет
12.1
Билет 12.2
ЭЛЕКТРОМАГНИТЫ
Регулируемые электромагниты являются связующим звеном между электроникой и гидравликой. Назначение: Вырабатывать выходные величины (силу, перемещение) пропорционально входной величине, т.е. электрическому току. В зависимости от выполняемых функций выпускают: — Электромагниты с характеристикой “сила — ток”, так называемые “регулируемые по силе электромагниты”
— электромагниты с характеристикой “перемещение — ток”, так называемые “регулируемые по перемещению электромагниты”
ПИТАНИЕ ЭЛЕКТРОМАГНИТОВ
Для пропорционального (от тока) изменения силы и по положению применяют только электромагниты постоянного тока. Электромагниты переменного тока должны занимать свое конечное положение по возможности без промедления в связи с тем, что потребление тока у них зависит от перемещения. Итак, электромагнит для пропорциональной техники — это регулируемый, работающий в масле электромагнит постоянного тока
Э лектромагниты,
регулируемые по силе
лектромагниты,
регулируемые по силе
Сила этого электромагнита определяется величиной тока. Якорь электромагнита перемещается незначительно. Наличие обратной связи по току обеспечивает поддержку постоянной по величине электромагнитной силы, несмотря даже на присутствие возмущающего воздействия. Величина электромагнитной силы сохраняется постоянной по всему диапазону перемещения при одинаковой силе токе. Монтажные размеры регулируемого по силе электромагнита, вследствие его короткого хода – незначительны. Данный электромагнит, применяется в пропорциональных распределителях и напорных клапанах. В них электромагнитная сила преобразовывается в гидравлическое давление.
Электромагнит, регулируемый по положению
П оложение
якоря регулируется посредством
замкнутого контура регулирования по
перемещению и удерживается независимо
от противодействующей силы (при условии,
что эта сила будет действовать в
допустимом рабочем диапазоне). Такие
электромагниты применяют, преимущественно,
в четырехлинейных пропорциональных
клапанах прямого действия. А также они
приводят в действие пропорциональные
распределители и регуляторы потока.
Ими обеспечивается точное позиционирование
золотника. Ход якоря магнита составляет
в зависимости от конструктивных
параметров от 3 до 5 мм.
оложение
якоря регулируется посредством
замкнутого контура регулирования по
перемещению и удерживается независимо
от противодействующей силы (при условии,
что эта сила будет действовать в
допустимом рабочем диапазоне). Такие
электромагниты применяют, преимущественно,
в четырехлинейных пропорциональных
клапанах прямого действия. А также они
приводят в действие пропорциональные
распределители и регуляторы потока.
Ими обеспечивается точное позиционирование
золотника. Ход якоря магнита составляет
в зависимости от конструктивных
параметров от 3 до 5 мм.
Особенности электромагнитов
Возникающие на золотнике клапана прямого действия гидродинамические силы частично уравновешиваются, но тем не менее значительны. Этими электромагнитами имеющими обратную связь, обеспечиваются малые величины гистерезиса и погрешность повторяемости.
В клапанах непрямого действия управляющее гидравлическое давление воздействует на большую рабочую поверхность. Возникающие при этом усилия значительно превышают возмущающие силы. Поэтому они в процентном отношении малы и почти не влияют на управляемый золотник. Ввиду этого пропорциональные клапаны непрямого действия могут конструироваться без электрической обратной связи.
Билет 13.1.
Расчет времени движения штока пневмоцилиндра одностороннего действия при рабочем ходе
Расчет периода движения поршня осуществляем исходя из уравнения теплового баланса. Используя то, что V=Fx и dV=Fdx где F – площадь поршня, запишем уравнение в виде
 .
.
Уравнение следует решать совместно с уравнением движения поршня:
 ,
,
где
т
—
приведенная масса движущихся звеньев,
связанных с поршнем;
 —ускорение
поршня. В конечном виде эта система
уравнений не решается. Для решения ее
используются приближенные методы
численного интегрирования. Наиболее
распространенным методом решения этой
системы уравнений является метод, при
котором за независимую переменную
принимается время. При расчетах задаются,
начиная от момента начала движения с
параметрами
—ускорение
поршня. В конечном виде эта система
уравнений не решается. Для решения ее
используются приближенные методы
численного интегрирования. Наиболее
распространенным методом решения этой
системы уравнений является метод, при
котором за независимую переменную
принимается время. При расчетах задаются,
начиная от момента начала движения с
параметрами
 ,
,
 ,
,
 и
и
 ,
малыми интервалами времени Δt,
по истечении которых находят параметры
в последующий момент времени при
известных параметрах в предыдущий
момент.
,
малыми интервалами времени Δt,
по истечении которых находят параметры
в последующий момент времени при
известных параметрах в предыдущий
момент.
Система уравнений численного интегрирования ,будет тогда иметь вид:

Решение
системы уравнений (6.10) продолжается до
тех пор, пока поршень не пройдет весь
путь s,
при котором
 .
Общее время движения поршня найдется
как сумма интервалов времени
.
Общее время движения поршня найдется
как сумма интервалов времени
 .
Точность расчета времени движения и
закона изменения всех параметров тем
выше, чем меньше интервалы
.
Точность расчета времени движения и
закона изменения всех параметров тем
выше, чем меньше интервалы ,
но в этом случае увеличивается число
расчетных точек.
,
но в этом случае увеличивается число
расчетных точек.
Билет 13.2.
Пропорциональный распределитель прямого действия
Для распределителей данного класса очень важны такие характеристики как:
гистерезис, точность повтора, временная характеристики управляющего золотника,
передаточная функция
ПРИНЦИП ДЕЙСТВИЯ: К основным составным частям клапана относятся корпус 1, один или два регулируемых электромагнита 2 с характеристикой «ток-перемещение». В исполнении, показанном на рисунке показаны индуктивный датчик перемещения 3, управляющий золотник 4, а также одна или две возвратные пружины 5. Если электромагниты не активизированы, то управляющий золотник 4 будет удерживаться посредством возвратных пружин 5 в средней позиции. Приведение в действие управляющего золотника осуществляется непосредственно регулируемым электромагнитом.

При изображенном на рисунке золотнике закрыто соединение между Р, А, В и Т. Если, например, будет активизирован электромагнит А (слева), то он передвинет управляющий золотник вправо. Будут коммутированы Р—В и А —Т. Чем сильнее будет поступающий сигнал от электроуправления, тем дальше будет передвигаться вправо управляющий золотник. Ход его, таким образом пропорционален электрическому сигналу. А чем больше ход, тем больше проходное сечение и тем больше расход.
К левому электромагниту присоединен индуктивный датчик перемещения. Этот датчик регистрирует действительное положение управляющего золотника и выдаёт электронному усилителю электрический сигнал (в вольтах) пропорциональный перемещению.
Датчик перемещения устроен так, что контролируются оба положения переключения.
В конструкции датчика применяется «герметичное исполнение», то есть отсутствуют присоединительные линии для отвода масла.
Вследствие этого не нужно ставить каких либо уплотнений, а отсюда не будет дополнительного трения, всегда оказывающее отрицательное воздействие на точность датчика.
Позиционный контур автоматического управления выявляет существующие отклонения между предварительно заданным значением (заданная величина) и действительным значением (действительная величина) и выдает поправку путем подачи соответствующих сигналов к определенным электромагнитам.
На практике это приводит к тому(в зависимости от размера клапана), что расхождения по гистерезису, а также по точности повторения составляют не более ≤ 1%.
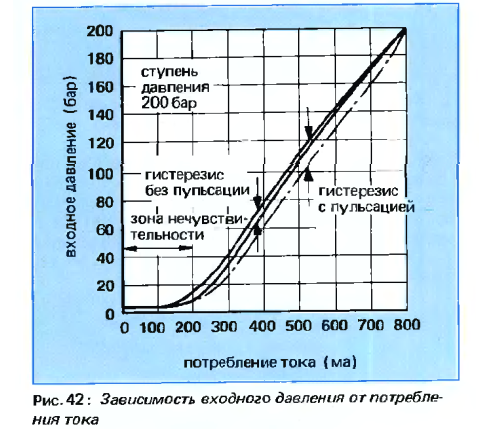
Гистерезис
Гистерезис можно охарактеризовать, как зависимость одного состояния от прежних состояний Если сигнал будет расти начиная от 0 до максимального значения, а потом наоборот уменьшаться, то золотник будет занимать в каждом случае положение пропорциональное сигналу. Появляющееся отклонение при одинаковом заданном значении, но при разных направлениях входного сигнала называют гистерезисом или погрешностью гистерезиса
Точность при повторении (воспроизводимость). Под этим понятием подразумевается диапазон, в пределах которого располагаются выходные сигналы при установке одного и того же входного сигнала
По отношению к управляющему золотнику это означает, что при повторной установке одного и того же заданного значения отклонение от позиции будет составлять ≤ 1%. (при WRE)
@ Показанный на рисунке распределитель не имеет датчика перемещения. Вследствие позиция золотника не контролируется. В результате этого (в зависимости от размера клапана) гистерезис будет составлять 5 — 6%, а точность при повторении 2—3% .
На практике часто такая точность является вполне достаточной. Вследствие этого такое конструктивное исполнение представляет собой дешевое решение задачи управления.
Билет 15.1.
Билет
15.2.
Пропорциональный распределитель
непрямого действия
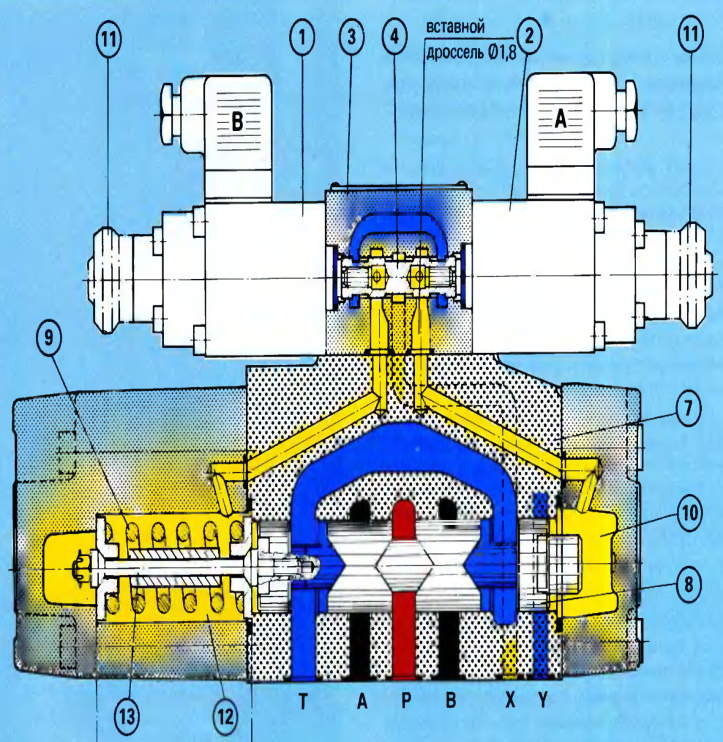
Как при переключающих распределителях, так и при пропорциональных клапанах, предварительно принимаются большие условные проходы. Это делается для того, чтобы обеспечить требуемые усилия для перемещения рабочего цилиндра.
Обычно до типоразмера 10 выбирают клапаны прямого действия, а начиная с типоразмера 10, выбирают клапаны непрямого действия.
Пропорциональный распределитель непрямого действия состоит из пилотного клапана (3) с регулируемыми электромагнитами (1) и (2), основного клапана (7) с золотником (8) и центрирующей пружиной и одновременно регулировочной пружины (9).
В качестве регулируемого электромагнита используется вариант с характеристикой "сила — ток".
Принцип действия распределителя в упрощенной форме:
Поступающий от электроуправления сигнал преобразовывается в регулируемых электромагнитах (1) или (2) в пропорциональную силу. В соответствии с этой силой мы получим на выходе (А или В) пилотного клапана (3) соответствующее давление. Это давление оказывает воздействие на торец основного поршня (8) и смещает его к пружине (9) до тех пор, пока между усилием пружины и силой давления не будет достигнуто равновесие. Ход поршня, а вследствие этого и проходное сечение, зависят от силы давления, действующей на торцевую поверхность поршня. Для изменения давления можно применять клапан для ограничения давления или редукционный клапан.
Описываемый здесь распределитель имеет редукционный клапан в качестве управляющего клапана. Преимущество его заключается в том, что масло в линии управления не течет постоянно.
Если электромагниты не активизированы, то управляющий золотник (4) удерживается пружинами в средней позиции. Линии А и В соединены с линией Т, и вследствие этого они не находятся под давлением. Линия Ρ закрыта. Если, например, будет включен электромагнит В (1), то сила электромагнита действуя через плунжер измерения давления (5) на управляющий золотник (4) и смещает его вправо. Вследствие этого масло течет от Ρ к А Линия В остается по-прежнему соединенной с Т. Давление, возросшее в лини А, заряжает давлением через радиально просверленное отверстие в управляющем золотнике (4) поршень измерения давления (6). Возникающая отсюда сила давления противодействует силе электромагнита и смещает управляющий золотник (4) в направлении закрытия, когда между двумя силами будет достигнуто равновесие.
Т.о. с помощью управляющего клапана мы видоизменяем давление в точках А или В пропорционально электрическому входному сигналу.
Если камеры (10) и (12) будут без давления, т.е. А и В пилотного клапана соединены с баком, то основной золотник (8) будет удерживаться центрирующей пружиной (9) в среднем положении.
При этом измерительный поршень (6) опирается на толкатель электромагнита (2).
Соединение Ρ → А прерывается, давление в рабочем канале А поддерживается постоянной величины.
Понижение электромагнитной силы приведет к образованию избытка силы давления на управляющий золотник (4) и произойдет смещение его влево.
Через соединение А → Τ излишки масла вытекают и соответственно понижается давление.
Равновесие сил вновь будет означать стабилизацию давления, но уже на более низком уровне. В положении покоя — регулируемый электромагнит обесточен — открыты каналы А и В к Т, это означает, что масло может беспрепятственно течь в бак а точки В или А будут без давления. Одновременно прерывается соединение Ρ →А или Ρ→ В.
Билет 16.1.
Билет 16.2.
Пропорциональные клапаны ограничения давления
Служат для дистанционной установки заданного давления в гидросистеме с возможностью воздействия электрическим способом на его повышение и понижение во времени.
Таким образом, давление может изменяться с помощью электрического задатчика до величины соответствующей требованиям процесса или подстраиваться к таким требованиям.
Пропорциональный
клапан для ограничения давления прямого
действия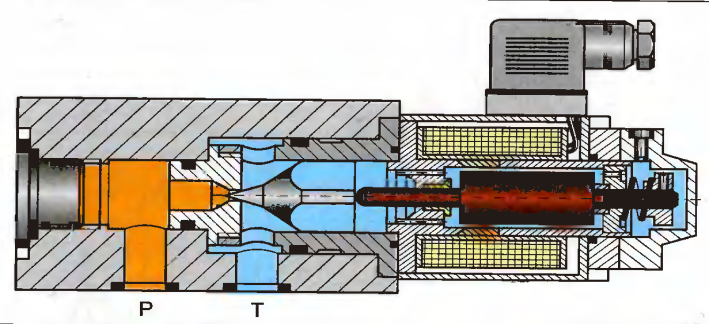
И так,
возникающие отклонения регулируемой
величины (перемещение конусного затвора)
от его заданного значения корректируется
регулировочным устройством.
так,
возникающие отклонения регулируемой
величины (перемещение конусного затвора)
от его заданного значения корректируется
регулировочным устройством.
С помощью этого обеспечивается чрезвычайно точное, воспроизведение усилия сжатия предварительно затянутой пружины.
В результате, имеем:
гистерезис < 1% максимального давления настройки;
точность при повторении: <0 5% максимального давления настройки
Давление настройки в зависимости от задаваемого значения
По графической характеристике можно видеть, что максимальное давление настройки зависит еще и от расхода.
В связи с этим следует еще упомянуть о роли пружины (8). Она предназначается для того, чтобы при сигнале «0" такие подвижные детали, как, например, якорь, смогли отодвигаться назад для того, чтобы обеспечить самое низкое рмин. Кроме того, если клапан будет расположен вертикально, то она будет служить, для компенсации массы якоря.
Билет 17.2.

Билет 17.1
.
 Билет
18.1.
Билет
18.1.

Билет 18.2.
Понятие "серво" приобрело в наше время широкое распространение. Как правило, это понятие употребляется в качестве обозначения функции преобразования слабого сигнала на входе в сильный сигнал на выходе. Наиболее известно рулевое сервоуправление автомобиля, где руль, приводная сила которого невелика, передает на колеса большое усилие. Точно также дело обстоит и в сервогидравлике. Выходной сигнал малой мощности, например, 0.08 ватт, преобразуется в аналоговый сигнал мощностью в несколько сот киловатт. Однако сервоклапаны применяются не только в аналоговом управлении. В отличие от клапанов пропорционального действия они применяются главным образом в электрогидравлических системах регулирования (следящих системах), например, в системах стабилизации (удержание в заданном положении под нагрузкой) и в системах регулирования скорости (поддержание заданной скорости).
Двухступенчатые сервоклапаны состоят из первой ступени (электродвигатель 1
и гидроусилитель 2) и второй ступени. Поясним вначале первую ступень
(рис. 1) . Электродвигатель 1, состоящий из постоянного магнита 3, катушек 4 и якоря с
заслонкой 5, преобразует малый сигнал на входе в пропорциональное движение заслонки. Якорь и заслонка образуют один блок, который крепится к тонкой эластичной
трубе 6. Эта труба одновременно герметизирует двигатель, отделяя его от гидравлической части. Применяется сухой электродвигатель. Электрический сигнал возбуждает катушки магнита, приводя якорь против пружинящего усилия трубы, в движение. Направление движения якоря зависит от знака тока на входе. Момент силы, действующий на трубу и движущий заслонку, пропорционален величине тока управления. Когда ток управления выключен, труба (возвратная пружина) возвращает якорь и заслонку в исходное положение. Такая передача движущего момента в двигателях подобной конструкции имеет ряд преимуществ; отсутствие трения, малый гистерезис и гидроизоляция двигателя (в рабочей среде отсутствует магнитное поле). Преобразование движения заслонки в гидравлическую величину происходит в гидроусилителе 2. В качестве гидроусилителя применяется элемент сопло — заслонка. Вторая ступень представляет собой золотник, поршень управления 4 которого помещается в износостойкой втулке (в другом исполнении поршень находится непосредственно в корпусе золотника) и центрируется двумя нажимными пружинами 6 и 7. Поршень и втулка управления притираются таким образом, что достигается почти нулевое перекрытие. В зависимости от типа гидросистемы на практике применяется небольшое положительное или отрицательное перекрытие. При нулевом сигнале на входе первой ступени ( i = 0) заслонка находится в среднем положении. Давление между нерегулируемыми и регулируемыми соплами одинаково.
На обе стороны поршня управления действует одинаковое давление. Поршень находится в нейтральном положении. Точки подключения Р, А, В и Т при нулевом перекрытии, изображенном на рисунке, закрыты. Когда по сигналу управления заслонка уходит влево, давление в полости пружины 6 возрастает, а давление в полости пружины 7 падает. Перепад давления заставляет поршень управления 4 двигаться вправо в направлении пружины 7 до тех пор, пока силы, действующие на обе стороны поршня, не уравновесятся. Поршень занял заданное положение. Чем больше перепад давления, тем сильнее сигнал на входе, тем больше движение поршня в том или ином направлении. Чем больше ход поршня, тем больше сечение отверстия канала Р - А или Р - В, тем больше расход, тем выше скорость потребителя. С помощью установочных винтов 8 и 9 можно снаружи регулировать силу натяжения пружины и,следовательно, положение поршня относительно распределительной кромки. Механическая обратная связь (рис. 5) В этом случае поршень управления соединен возвратной пружиной с двигателем управления первой ступени. Сила натяжения возвратной пружины противодействует усилию двигателя. Когда поршень занимает требуемое положение, движущий
момент двигателя равен изгибающему моменту возвратной пружины. Заслонка находится в нейтральном положении. Это равновесие сил ведет к равновесию давления управления, благодаря чему поршень удерживается в нужном положении. То есть ход поршня и расход пропорциональны току на входе. С помощью регулирующих устройств
второй ступени можно точно отрегулировать положение распределительных кромок относительно поршня.
Условное обозначение

Билет 19.1.