

16.Центр тяжести
Центром тяжести C материальной системы (или тела) называется центр параллельных сил, приложенных ко всем частицам системы и пропорциональных весам этих
частиц. Эта точка, называемая также центром масс или центром инерции (вне зависимости от веса), имеет координаты: xС = (∑mi xi ) / M : yС = (∑mi yi ) / M : zС = (∑mi zi ) / M . где mi - массы частицы с координатами xi, yi, zi; М = ∑ mi масса всей системы (тела); ∑mi xi , ∑mi yi, ∑mi zi -статические моменты массы тела относительно координатных плоскостей yOz, zOx, xOy. под mi, можно понимать также массы конечных элементов тела, а под xi, yi, zi — координаты центра тяжести элемента с массой mi. для линий: xС = (∑∆Li xi ) / L: yС = (∑∆Li yi ) / L . для площадей: xС = (∑∆Fi xi ) / F : yС = (∑∆Fi yi ) / F ,где ∑∆Fi xi - статический момент площади относительно оси х; ∑∆Fi yi - статический момент этой площади относительно оси у. Если центр тяжести лежит на какой-либо оси, то соответствующий статический момент обращается в нуль. Если тело симметрично относительно некоторой точки, его центр тяжести совпадает с этой точкой. Если тело симметрично относительно некоторой оси, его центр тяжести лежит на этой оси. Если тело симметрично относительно некоторой плоскости, его центр тяжести лежит в этой плоскости.
18. Кинематика (дать понятия механического движения, времени траектории точки, системы отчета). Способы задания точек.
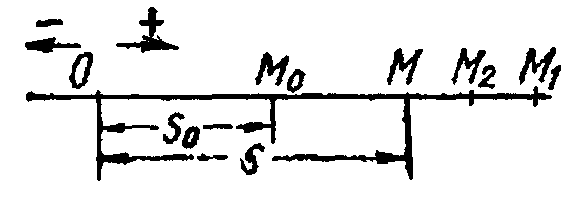
Если точка, выйдя в некоторый начальный момент времени t=0 из начального положения Мо, переместилась сначала в положение M1, а затем в М2, то расстояние М0М2 называется перемещением точки, а арифметическая сумма M0M1 + M1M2 — ее путем.
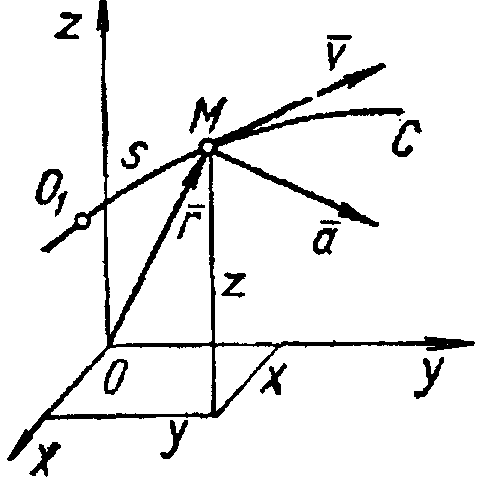
Кривая С, которую описывает точка М при своем движении называется ее траекторией. На траектории устанавливается начало отсчета О1 расстояние от которого по кривой в любой момент времени определяется законом движения по заданной траектории: s = f (t)
19.Понятия о моменте пары сил.
 Моментом
пары называется произведение одной из
сил пары на ее плечо
т =
Ph
. Момент пары изображается вектором,
перпендикулярным к плоскости действия
пары и приложенным в любой точке.
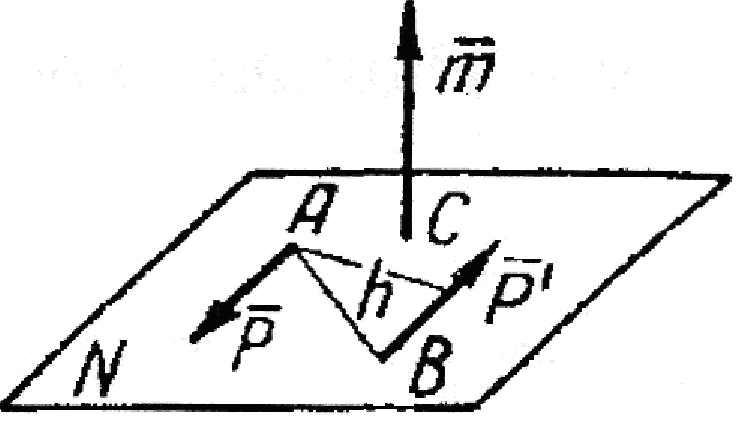
Парой сил называется совокупность двух
численно равных параллельных сил,
направленных в разные стороны. Расстояние
h
между
линиями действия сил пары называется
ее плечом. Пару нельзя заменить (а
следовательно, и уравновесить) одной
силой.
Моментом
пары называется произведение одной из
сил пары на ее плечо
т =
Ph
. Момент пары изображается вектором,
перпендикулярным к плоскости действия
пары и приложенным в любой точке.
Парой сил называется совокупность двух
численно равных параллельных сил,
направленных в разные стороны. Расстояние
h
между
линиями действия сил пары называется
ее плечом. Пару нельзя заменить (а
следовательно, и уравновесить) одной
силой.
Простейшие движения твердого тела (поступательное, вращательное, сложное движение).
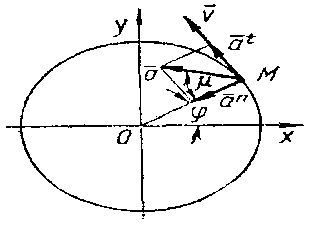
При поступательном движении тела в любой момент времени все его точки имеют геометрически равные скорости (vA = vB) и геометрически равные ускорения (аа=ав).Следовательно, при поступательном движении все точки тела движутся одинаковым образом. Если тело имеет неподвижную ось АВ, то его положение в произвольный момент времени t определяется двугранным углом φ между начальным положением АМ0В некоторой плоскости, проходящей через ось вращения, и ее положением АМВ в данный момент.
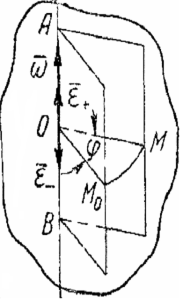 Скорости
и ускорения точек вращающегося тела v
= Rω;
at
=
R
ε;
an
=
R
ω2
Скорости
и ускорения точек вращающегося тела v
= Rω;
at
=
R
ε;
an
=
R
ω2
Движение твердого тела, состоящее из вращательного и поступательного, направленного вдоль оси вращения, называется винтовым. Плоско-параллельным движением твердого тела называется движение, при котором все точки тела движутся в плоскостях, параллельных некоторой неподвижной плоскости. Это движение определяется движением плоской фигуры — проекции тела на плоскость, параллельно которой происходит движение.