

Будова та принцип дії крокових двигунів. Основні вимоги. Області застосування.
Шаговые двигатели – это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора вызывает фиксацию ротора
Строение: Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого (ферромагнитного) материала или из магнито-твёрдого (магнитного) материала
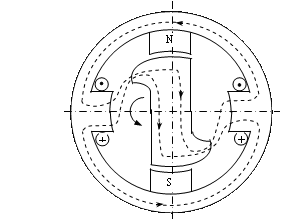
Принцип действия основан на дискретном изменении состояния электромагнитного поля в рабочем зазоре электрической машины. Двухполюсный ротор из магнитомягкой стали с клювообразными выступами помещен в четырехполюсный статор. Одна пара полюсов выполнена из постоянных магнитов, на другой – находится обмотка управления. При подаче постоянного напряжения на обмотку управления возникает магнитный поток Фу примерно вдвое больший, чем поток постоянных магнитов. Под действием электромагнитного усилия, создаваемого этим потоком, ротор поворачивается, преодолевая нагрузочный момент и момент, развиваемый постоянными магнитами, стремясь занять положение соосное с полюсами управляющей обмотки. Следующий управляющий импульс отключает напряжение с обмотки управления и ротор поворачивается под действием потока постоянных магнитов в сторону клювообразных выступов.
Требования: быстродействие, устойчивость движения и его квантования по шагам;конструктивная простота(Простота управления, компактность моторов и приводов, больший удельный вращающий момент)
Шaговые двигaтели уже давно и успешно применяются в самых разнообразных устройствах: Приборы точной механики и оптики, Измерительные приборы, Робототехника, Медицинское и лабораторное оборудование, Дисководы, принтеры, сканеры, копировальные машины
Синхронный. Реактивный двигатель
Реактивным двигателем называется синхронный двигатель без обмотки возбуждения и без постоянных магнитов. Вращающий момент в таких двигателях возникает вследствие различия магнитных проводимостей по продольной и поперечной осям машины.
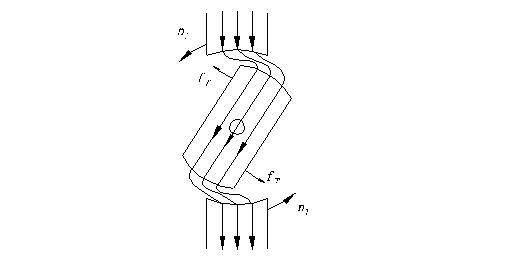
Рис. 3.10. Схема, иллюстрирующая возникновение реактивного момента.
Принцип действия. Пуск.
Явно выраженные полюса ротора синхронного реактивного двигателя стремятся занять такое положение, чтобы магнитное сопротивление для силовых магнитных линий было минимальным. Вследствие этого появляется тангенциальная составляющая силы fТ, которая заставляет вращаться ротор машины в направлении вращения поля и со скоростью его вращения.
Конструкция
Статор синхронной реактивной машины выполняется, так же как и статор обычной машины переменного тока. Ротор собирается из стальных листов специального профиля (рис.3.11). На его валу расположена короткозамкнутая обмотка для асинхронного пуска синхронного реактивного двигателя.

Определение Э-М момента
Электромагнитный момент синхронного реактивного двигателя выражается следующей зависимостью:
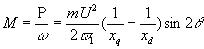
где xd и xq - синхронные индуктивные сопротивления по продольной и поперечной осям машины.
Начальный пусковой момент у этих двигателей равен 0. Поэтому в них применяется асинхронный способ пуска, для чего используется короткозамкнутая обмотка на роторе.
Плюсы и минусы
Плюсы: Реактивные двигатели проще по конструкции, дешевле и надежнее в эксплуатации, чем обычные синхронные машины с обмоткой возбуждения на роторе.
Основные недостатки двигателей: низкий cosφ и КПД, большие размеры, малая величина максимального момента. В двигателе мощностью несколько десятков ватт КПД составляет 0,3...0,4, а мощностью до 10 ватт - менее 0,2.
Так как момент двигателя пропорционален U2, то двигатель чувствителен к колебаниям питающего напряжения.
Області застосування СРД
Р. с. д. применяют в устройствах автоматики и телемеханики, в схемах синхронной связи, в аппаратуре звукозаписи, в радиолокации, в бытовых приборах, мед. аппаратуре и т. д.