

6.Редуцирование масс.
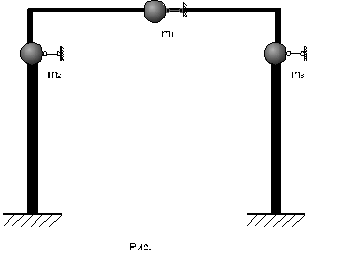
Редуцирование масс – это приведение масс с уровня подкрановых балок на уровень покрытия в бескрановых рамах.
Для этого необходимо составить матрицу жесткости и матрицу масс для поперечной рамы.
Составление матрицы жесткости промежуточной и торцевой рамы
Матрица масс промежуточной рамы.
Матрица масс торцевой рамы имеет вид
Редуцирование матрицы масс
![]()
![]()
7.Составление матрицы масс
Общий вид матрицы масс:
 ,
где
,
где
М1 = 2·М2 + mкр + mтел + mгр, где
mкр + mтел = 1250кН=125 т – вес крана с тележкой;
mгр = 100 т – масса груза (грузоподъёмность)
М1= 255,9+ 100+ 125 = 337 (т)
Масса, сосредоточенная в центре масс покрытия:
МП = 2 m1rт + М4 + m1rпр (n – 3), где
n = 25 – кол-во рам
МП = 271,1+ 38,1+(25- 3)61,2 = 1527(т)
Момент инерции диска покрытия:
П = (МП/12)(L2 + К2) = (1527/12)(242 + 1442) = 2711419 (тм2)
Матрица масс имеет вид:
8.Определение величины крановой нагрузки
При пространственной расчетной схеме расчетная крановая нагрузка определяется следующим образом:
нормативная нагрузка, возникающая от торможения крановой тележки на 1-ом колесе
Тn = f (Gт + Qg) / n0, где
f – коэффициент трения, зависящий от типа подвеса груза;
Gт – вес тележки, кН;
Q – грузоподъемность крана, т;
g = 9,81– ускорение свободного падения;
n0 – число колес с одной стороны мостового крана.
крановая нагрузка от торможения тележки, действующая на колонну
Т = Тn n н ns у, где
n=1,1 – коэффициент перегрузки;
н=0,95 – коэффициент надежности по назначению;
nс=1 – коэффициент сочетания;
у – сумма ординат линий влияния тормозной нагрузки.
При грузоподъемности крана 100т и пролете 24 м принимаем крановое оборудование с параметрами:
Нормативное усилие от колеса Fк=450 кН.
Сумма ординат линии влияния y=2,62
Вес тележки Gт=410 кН.
Tкн=0,05(9,81Q+Gт)/n0=0,05 (9,81100+410)/4=17,4 кН.
Сила Т : T=нnncTкн y=0,951,1117,42,62=48 кН
9.Определение смещения расчетных точек
При динамическом расчете одноэтажного промышленного здания с жестким в своей плоскости покрытием используется преобразованная расчетная схема, в которой ОПЗ путем приема редуцирования представляется в виде двухмассовой системы. Дискретные массы путем редуцирования приводятся в точку, расположенную в уровне покрытия и точку, расположенную в уровне тормозных конструкций.
К




 рановую
нагрузку при торможении тележки
рассматривают по графику
рановую
нагрузку при торможении тележки
рассматривают по графику
Нагрузка носит почти ударный ха-
рактер. При торможении возникают
колебания.

0,02 1,99 2,0 t ,c
Дифференциальное уравнение, описывающее колебания ОПЗ под действием динамической нагрузки:
||M||{q`(t)} + ||X||{q``(t)} + ||C||{q(t)} = {P(t)} (1), где
||M|| - матрица инерционных параметров здания;
||X|| = 2||M|| - матрица коэффициентов сопротивления, где
 - коэффициент
демпфирования, определяемый по формуле:
- коэффициент
демпфирования, определяемый по формуле:
= w / 21+(/2)
( - логарифмический декремент затухания, равный для стальных конструкций 0,3, w - собственная частота колебаний по -той форме)
||C|| - матрица жесткости здания;
{q(t)} – вектор смещения расчетных точек;
{P(t)} – вектор динамической крановой нагрузки.
Для решения уравнения (1) используется метод разложения по главным формам колебаний, согласно которому смещение расчетных точек представляется в виде суммарных амплитудных значений смещений по главным формам колебания.
Смещение представлено интегралом Дюамеля:
 ,
где
,
где
f – номер расчетной точки;
номер формы колебания;
Vf, V амплитудные значения смещений расчетных точек f и при -то форме колебания;
расчетная точка, где приложена динамическая крановая нагрузка
f масса расчетной точки f;
собственная частота колебания с учетом затухания
 =
2
+ n2
=
2
+ n2
текущая функция t;
( значение нагрузки от торможения крановой тележки в расчетной точке в момент времени ;
крановая нагрузка, приложенная в расчетной точке .