

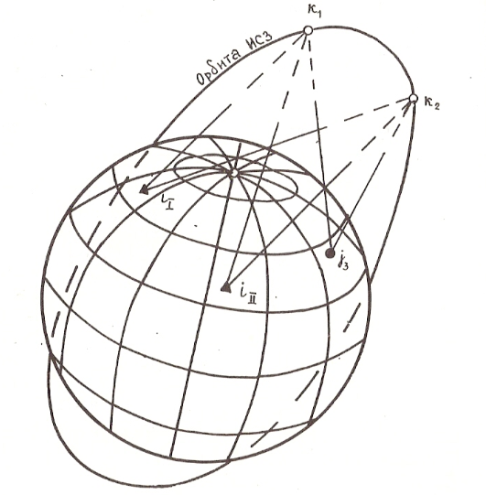
Метод космической триангуляции.
 В
данном методе измеренными величинами
являются топоцентрические экваториальные
координаты α и δ.
В
данном методе измеренными величинами
являются топоцентрические экваториальные
координаты α и δ.
Получить координаты ИСЗ этим методом можно только путем наблюдения ИСЗ с 2-х точек с известными координатами.
Аналогично определяем координаты спутника в точке К2, а затем можно получить координаты точки 3. Выполняя синхронные наблюдения во всех пунктах 1,2,3.
Метод космической трилатерации.
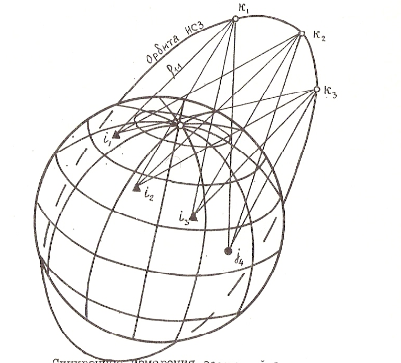 Измеренными
величинами в этом методе являются
расстояния до спутника в точках К1,
К2,
К3.
Такие измерения надо выполнять минимум
с 3-х наземных точек с известными
координатами. И можно получить координаты
точки 4.
Измеренными
величинами в этом методе являются
расстояния до спутника в точках К1,
К2,
К3.
Такие измерения надо выполнять минимум
с 3-х наземных точек с известными
координатами. И можно получить координаты
точки 4.
Доплеровский метод.
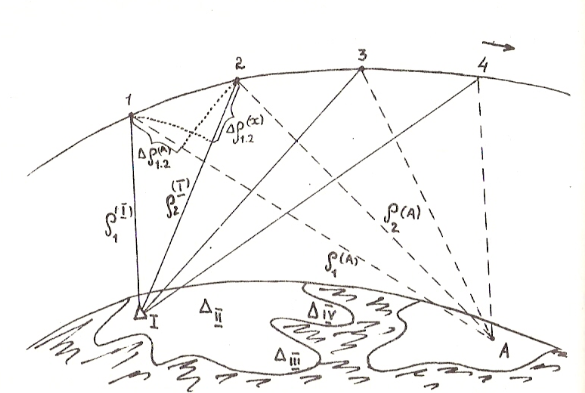 Использование
доплеровского метода в геометрических
построениях основано на измерении
разности расстояний с определяемого
пункта «А» до ряда положений ИСЗ, например
четырех.
Использование
доплеровского метода в геометрических
построениях основано на измерении
разности расстояний с определяемого
пункта «А» до ряда положений ИСЗ, например
четырех.
Чтобы определить координаты пункта «А» надо измерить три разности расстояний: Δρ12(А), Δρ23(А), Δρ34(А) от пункта «А» до четырех положений спутника.
Координаты этих точек спутника должны быть известны, их мы определяем, измеряя разности расстояний до этих точек с 4-х станций, положение которых известно. Станции: I, II, III, IV. Тогда по 12 доплеровским измерениям Δρ12(I), Δρ23(I), Δρ34(I),…… Δρ23(IV), Δρ34(IV) можно определить все 12 неизвестных координат: x1, y1, z1, ….. x4, y4, z4.
Тема 1.3. Движение исз в гравитационном поле Земли.
§1 Идея орбитального метода.
Предполагается, что модели сил, действующих на ИСЗ, известны с точностью, обеспечивающей соответствие модели движения ИСЗ его истинному движению.
За основу берутся наблюдения за движением ИСЗ. Измеренными величинами могут быть:
- фотографирование ИСЗ на фоне звезд;
- расстояние до него (лазерные или радиотехнические дальномеры);
- лучевая скорость (доплеровский интегральный метод).
Орбитальный метод имеет определенные преимущества перед геометрическими методами, т.к. в нем отпадает необходимость в синхронизации наблюдений. Орбитальным методом получают координаты в геоцентрической системе координат, а не в референцной геодезической.
§2 Орбитальный метод определения координат.
Этот метод заключается в совместном определении элементов орбиты ИСЗ и координат наземных и пунктов. Кроме того, орбитальный метод позволяет определить поправки за отличие начала координат геоцентрической системы от референцной геодезической системы. В этом методе не определяются параметры гравитационного поля Земли, а также иные возмущения (торможение в атмосфере, приливы и т.д.).
Движение спутника в пространстве определяется в основном силой притяжения Земли, а все другие могут рассматриваться как возмущения.
Возмущающие силы по своему характеру делятся на гравитационные и негравитационные. Главные – это гравитационные силы Земли.
Спутник считается материальной точкой, масса которого по сравнению с массой Земли, ничтожна, ею можно пренебречь.
Все тела, возмущающие движение ИСЗ (Солнце, Луна, планеты) рассматриваются как материальные точки. Гравитационные силы тел, не входящие в Солнечную систему малы, ими можно пренебречь.
Если считать, что спутник движется вокруг шарообразной Земли однородной массы и не испытывает воздействия других тел, то он движется по правильной эллиптической орбите. Такое движение называется «Кеплерово невозмущенное движение».
Движение спутника по невозмущенной орбите определяется шестью ее элементами. Реальное движение более сложное, по мере увеличения точности оскулирующих элементов орбиты, формулы значительно усложняются. На промежуточную орбиту спутника как бы накладываются разного рода возмущения. После учета всех возмущений получается орбита, близкая к реальной.
Уточнение орбиты ИСЗ производится по измерениям со станций, положение которых известно, а если требуется более высокая точность, то дополнительно уточняется и положение станции.